









注册服务器的公钥
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
将服务器加入到repo列表
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
将部署librealsense2 非开发者规则,构建并激活内核模块、运行时库和可执行演示和工具
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
安装了dev包后,可以用librealsense编译应用程序,通过 g++ -std=c++11 filename.cpp -lrealsense2 或者IDE
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg
测试SDK
realsense-viewer
D435i 安装包
sudo apt install ros-noetic-realsense2-camera
sudo apt install ros-noetic-realsense2-description
启动相机
roslaunch realsense2_camera rs_camera.launch#启动相机
rqt_image_view #rqt查看图像
启动电源相机
roslaunch realsense2_camera demo_pointcloud.launch #点云deemo
Python接口安装
pip install pyrealsense2
opencv安装(相机标定、使用的依赖)
sudo apt install python3-opencv
这个里20.04版本为:noetic,18.04版本为:melodic
sudo apt-get install ros-noetic-vision-opencv libopencv-dev python-opencv
D435i标定
安装依赖
这个是标定需要的功能包,相机功能包在前面已经安装
sudo apt-get install ros-noetic-camera-calibration
标定
打开d435i
roslaunch realsense2_camera rs_camera.launch
使用标定
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.025 image:=/camera/color/image_raw camera:=/camera --no-service-check
下载:find_object_2d
sudo apt-get install ros-noetic-find-object-2d
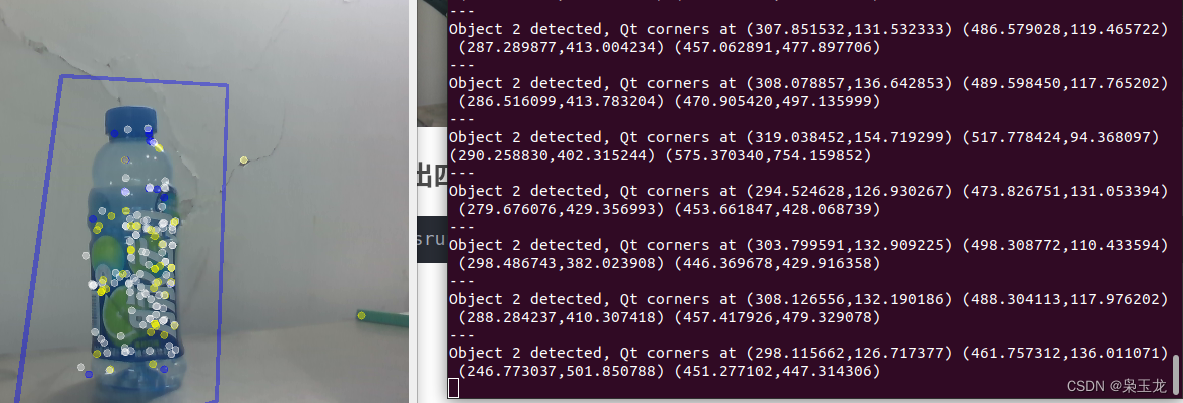
检测2D物体(平面图像、可检测物体在图像中位置)
启动:(image:=/camera/color/image_raw 为指定订阅image topic)
#启动相机
roslaunch realsense2_camera rs_camera.launch
#启动find_object_2d节点,并指定订阅话题
rosrun find_object_2d find_object_2d image:=/camera/color/image_raw

对准fin_object界面左侧 Objects下面的空白界面,单击鼠标右键->Add objects form scene ,就会显示出: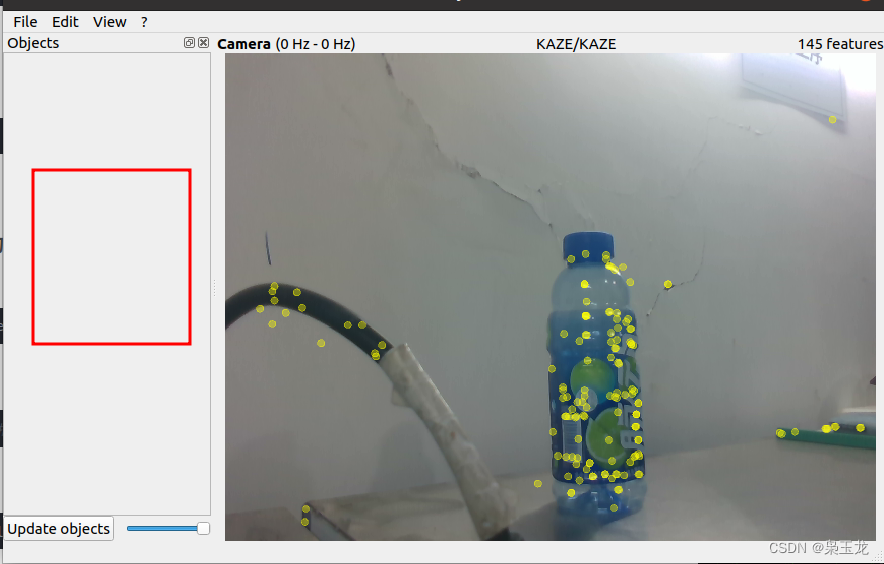
设置添加的物体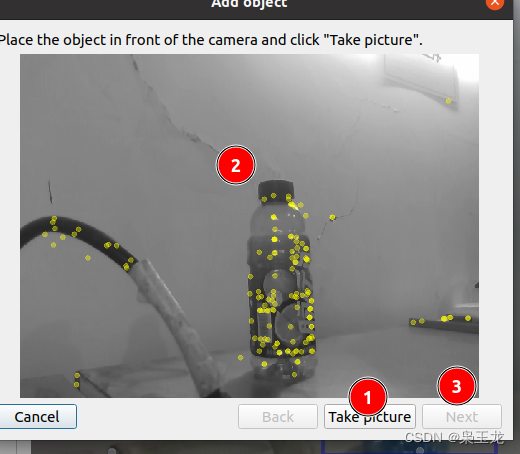
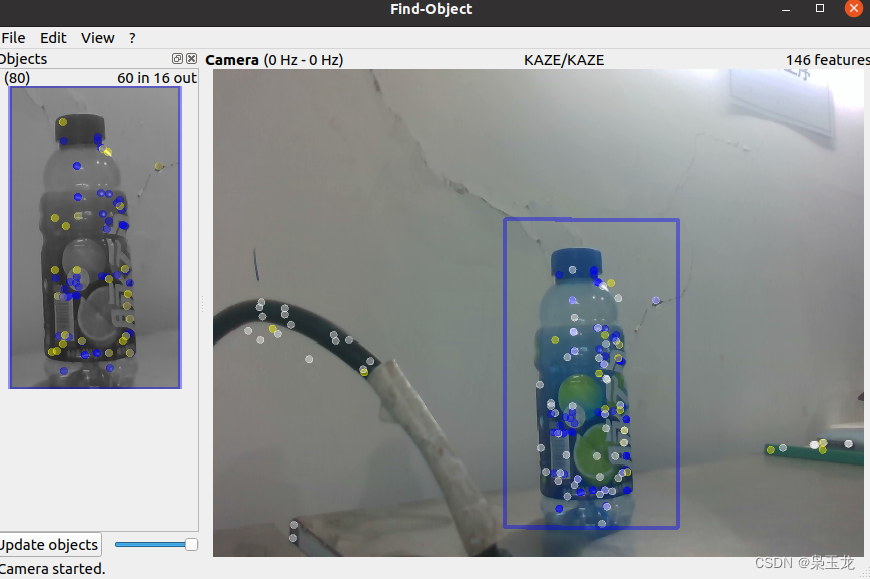
再打开
rostopic echo /objects
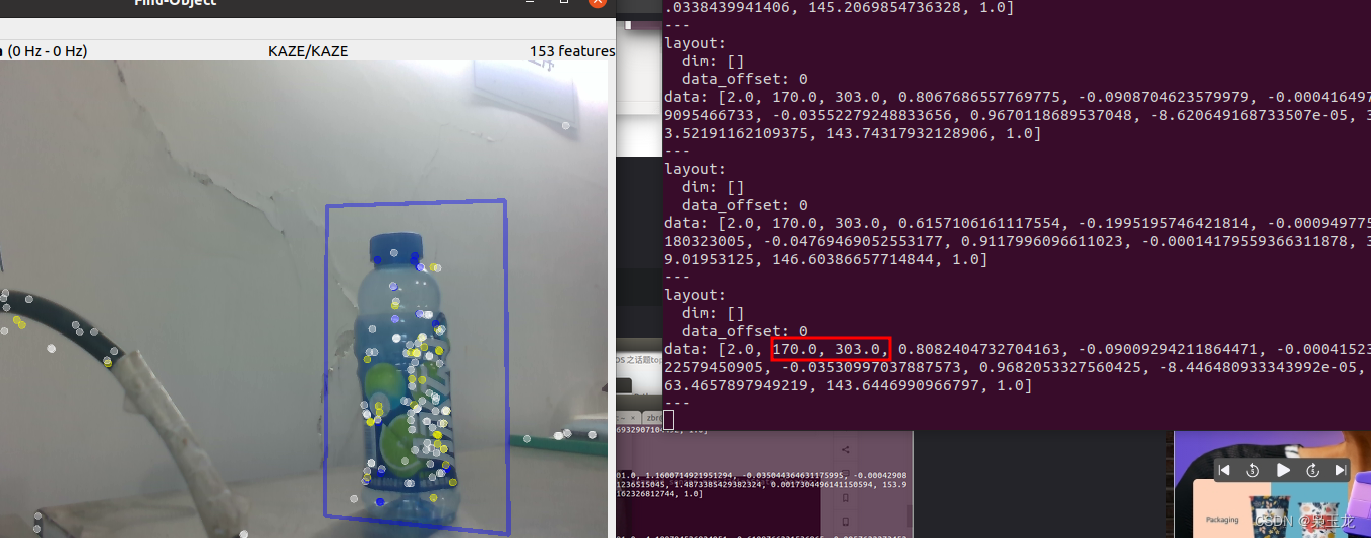
输出四角位置
rosrun find_object_2d print_objects_detected

















 2655
2655

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











