






在这里插入图片描述
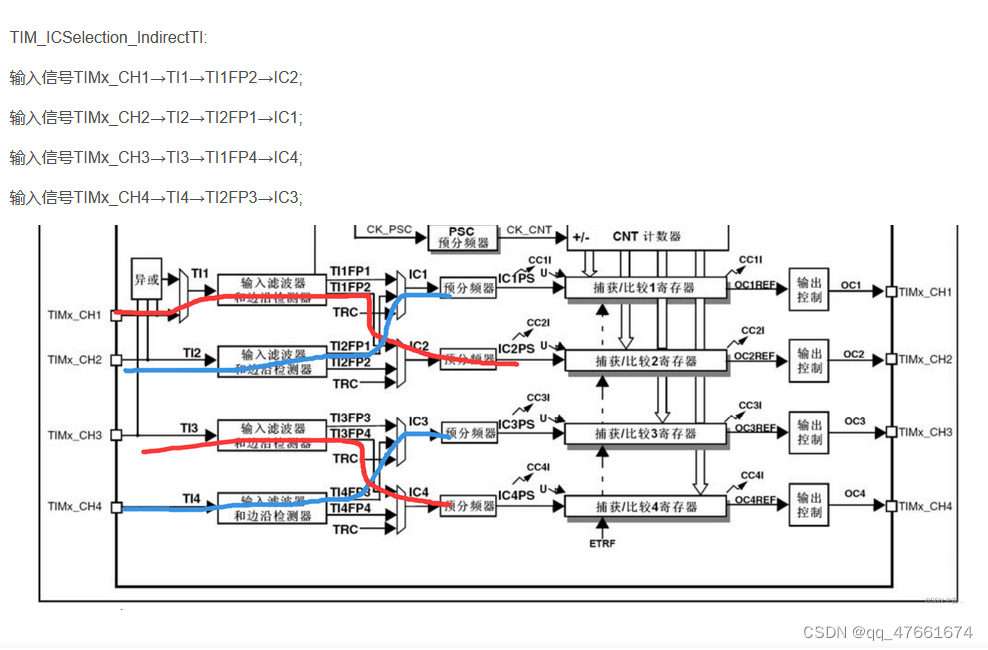
[TIM_ICSelection_DirectTI:和TIM_ICSelection_IndirectTI:解释](https://blog.csdn.net/m0_69752994/article/details/131730932?utm_medium=distribute.pc_relevant.none-task-blog-2defaultbaidujs_utm_term~default-0-131730932-blog-134116628.235%5Ev38%5Epc_relevant_anti_vip&spm=1001.2101.3001.4242.1&utm_relevant_index=3
代码
if(TIM5CH1_CAPTURE_STA & 0x80){
temp = TIM5CH1_CAPTURE_STA & 0x3F;
temp *= 0xFFFFFFFF;
temp +=TIM5CH1_CAPTURE_VAL;
printf("HIGH is %lldus \r\n", temp);
TIM5CH1_CAPTURE_STA = 0;
}
void TIM5_CH1_Cap_Init(u32 arr, u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimerBaseStructure;
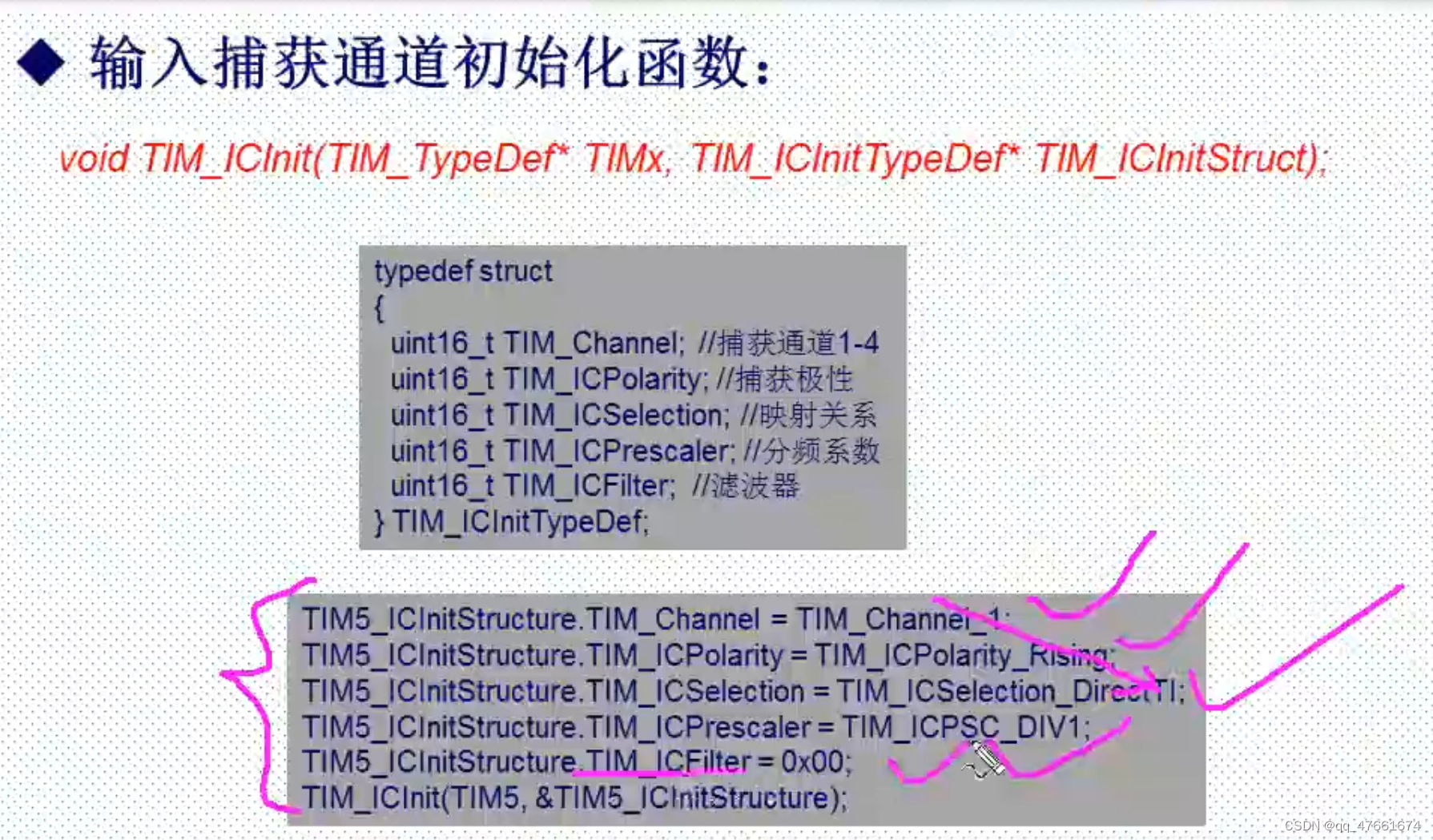
TIM_ICInitTypeDef TIM_ICInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
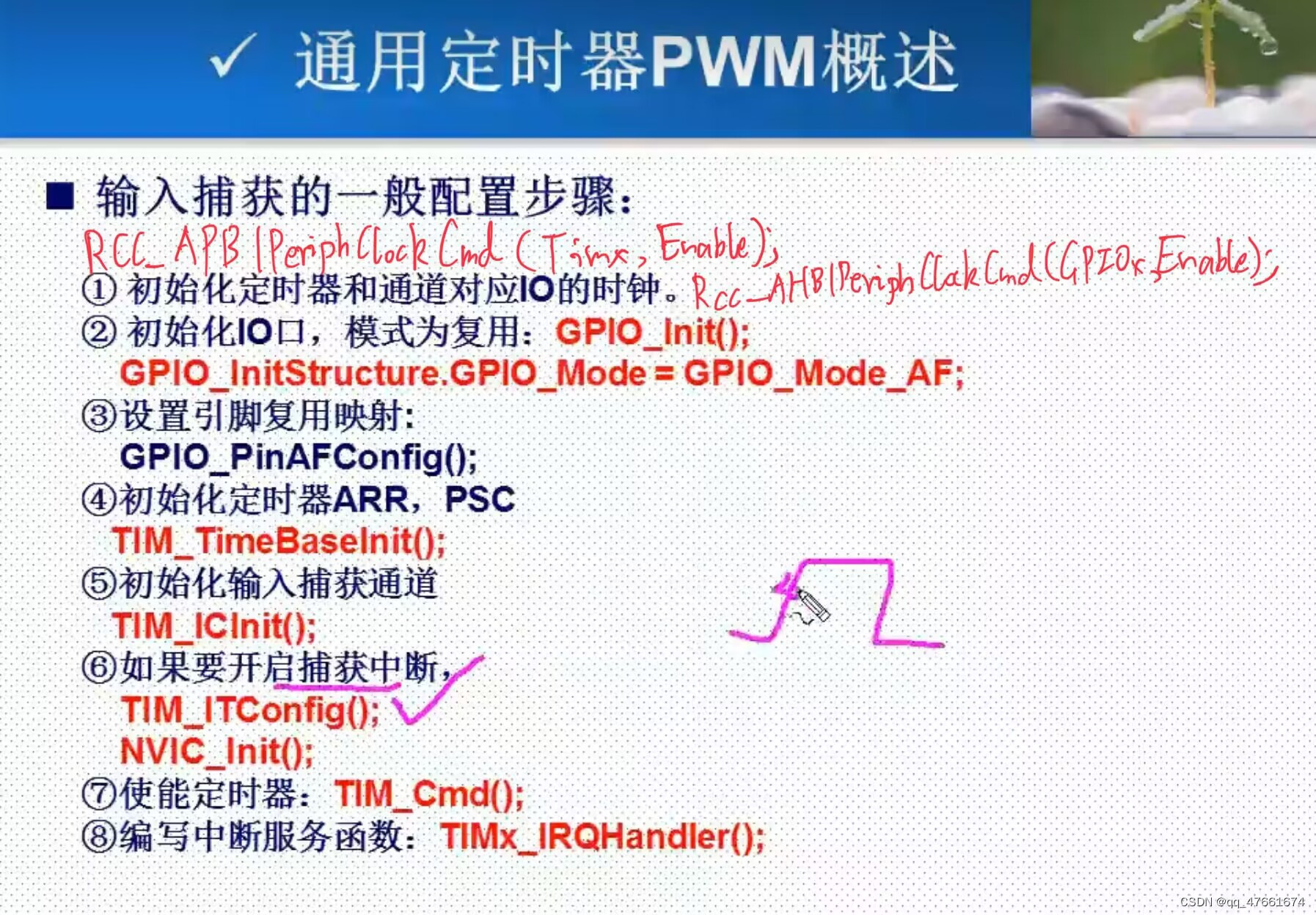
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOA,GPIO_PinSource0,GPIO_AF_TIM5);
TIM_TimerBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimerBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimerBaseStructure.TIM_Period = arr;
TIM_TimerBaseStructure.TIM_Prescaler = psc;
TIM_TimeBaseInit(TIM5,&TIM_TimerBaseStructure);
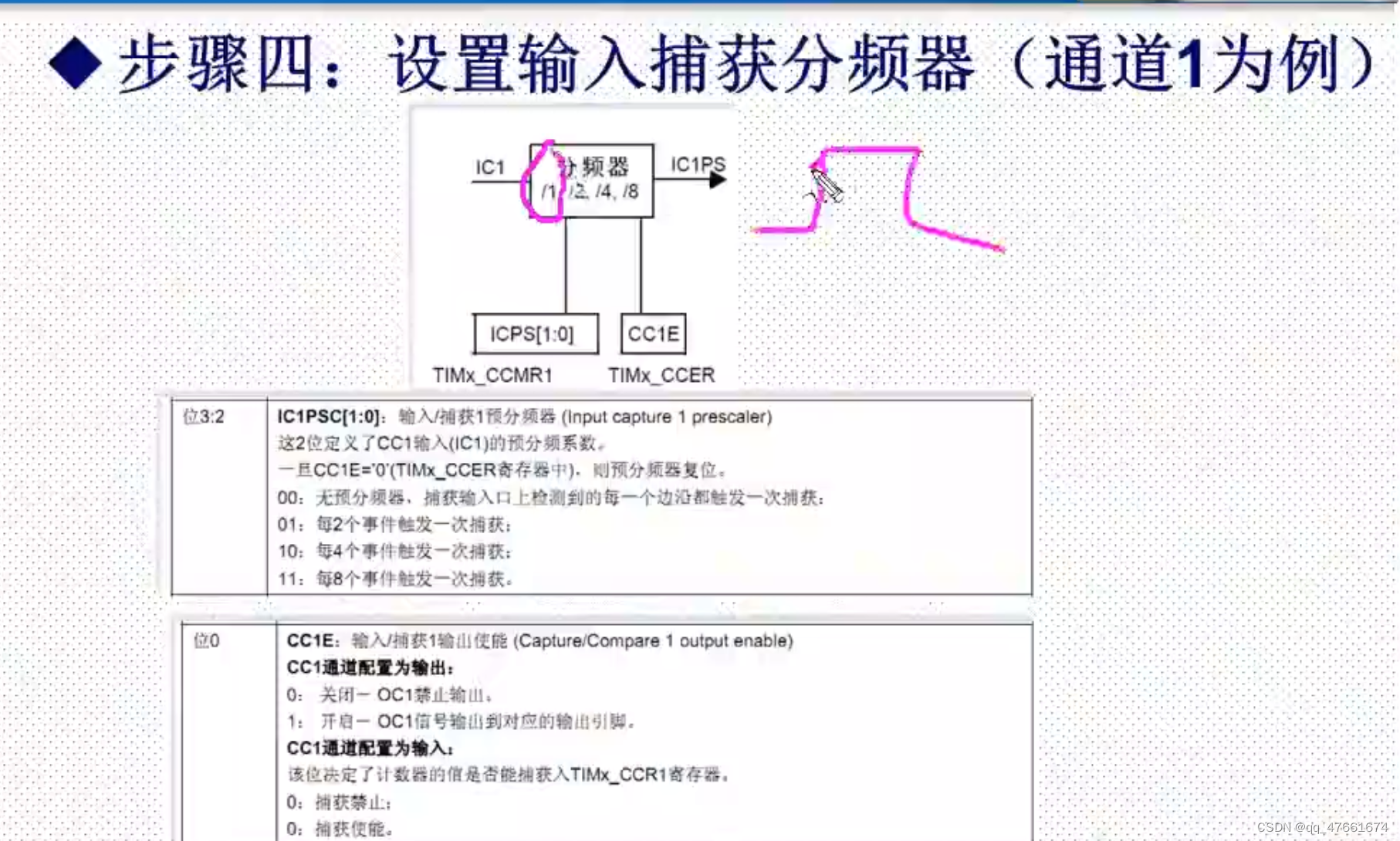
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
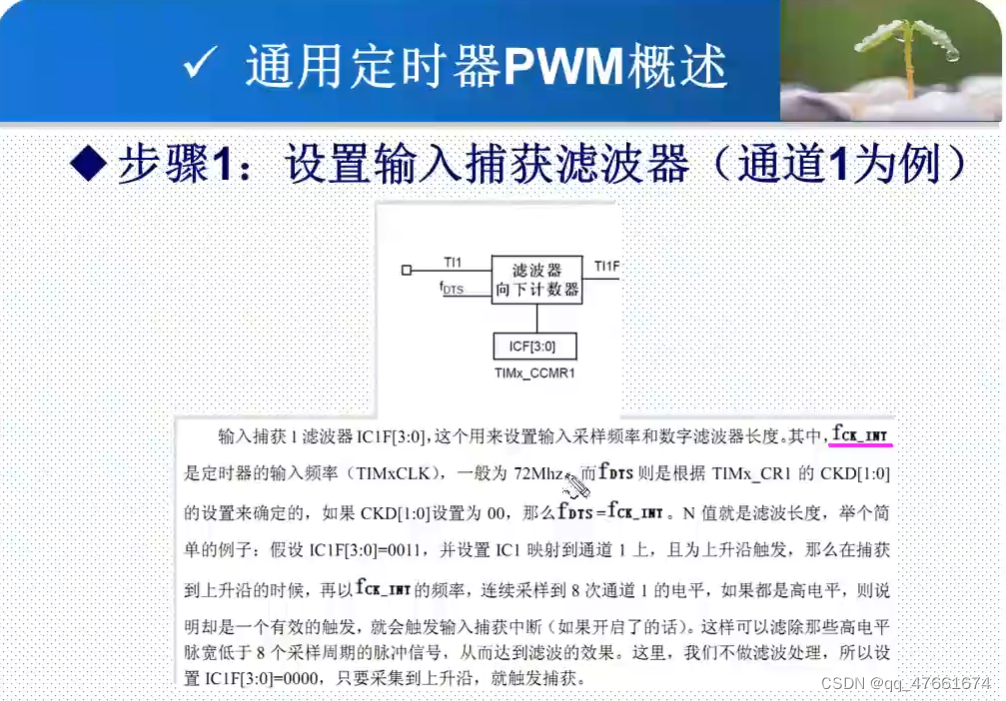
TIM_ICInitStructure.TIM_ICFilter = 0;
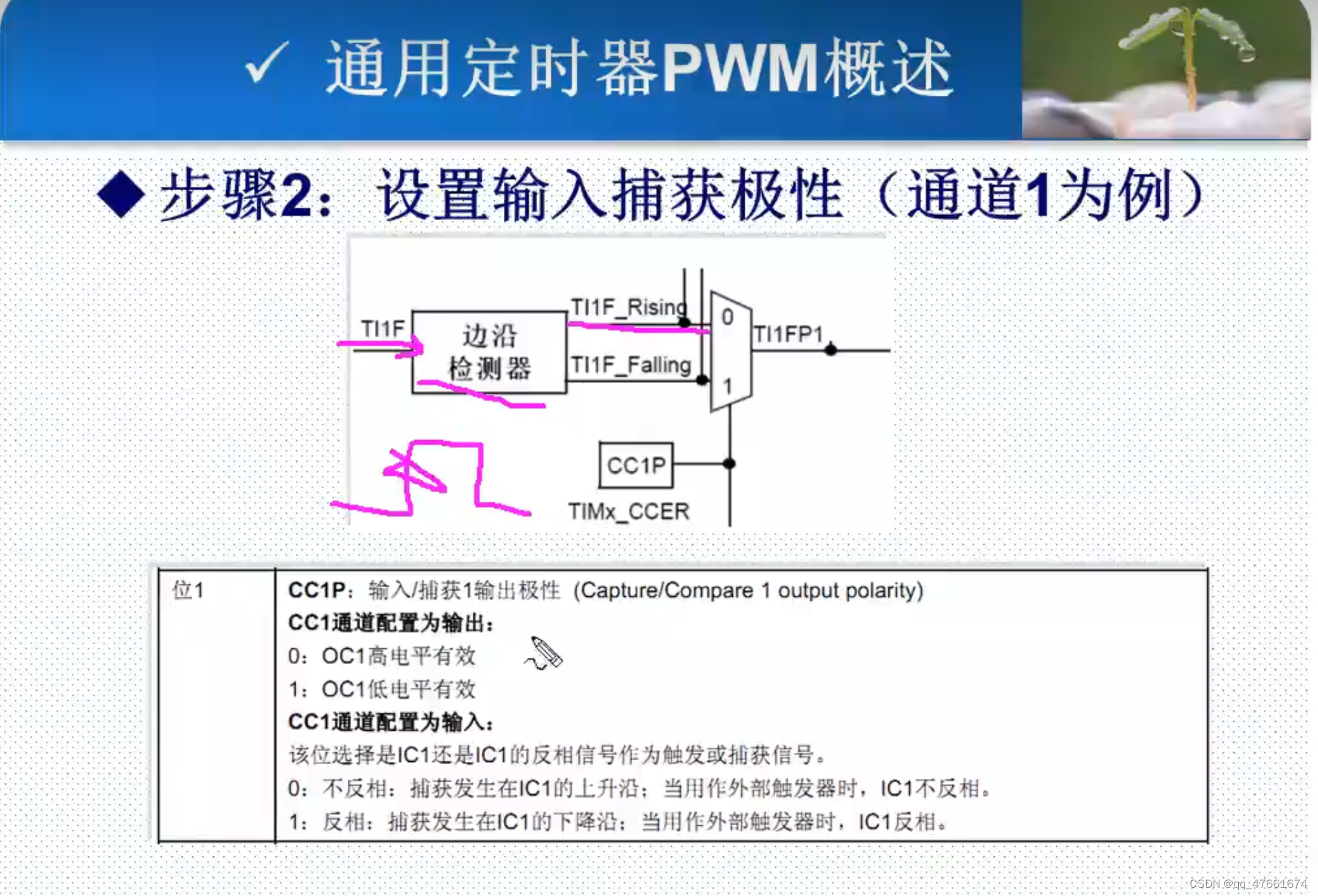
TIM_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising;
TIM_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1;
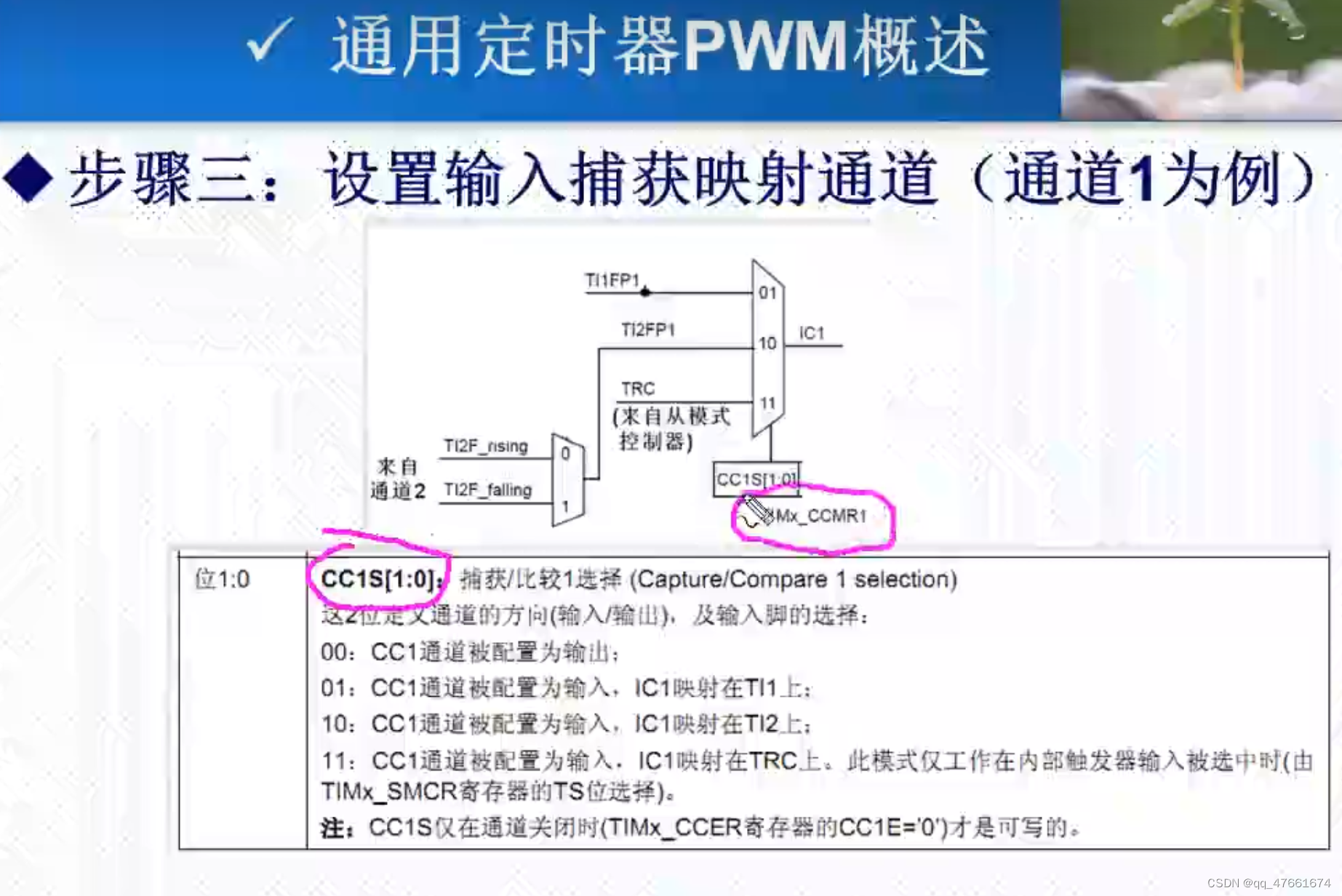
TIM_ICInitStructure.TIM_ICSelection =TIM_ICSelection_DirectTI;
TIM_ICInit(TIM5,&TIM_ICInitStructure);
TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);
TIM_Cmd(TIM5, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority= 2;
NVIC_InitStructure.NVIC_IRQChannelSubPriority =0;
NVIC_Init(&NVIC_InitStructure);
}
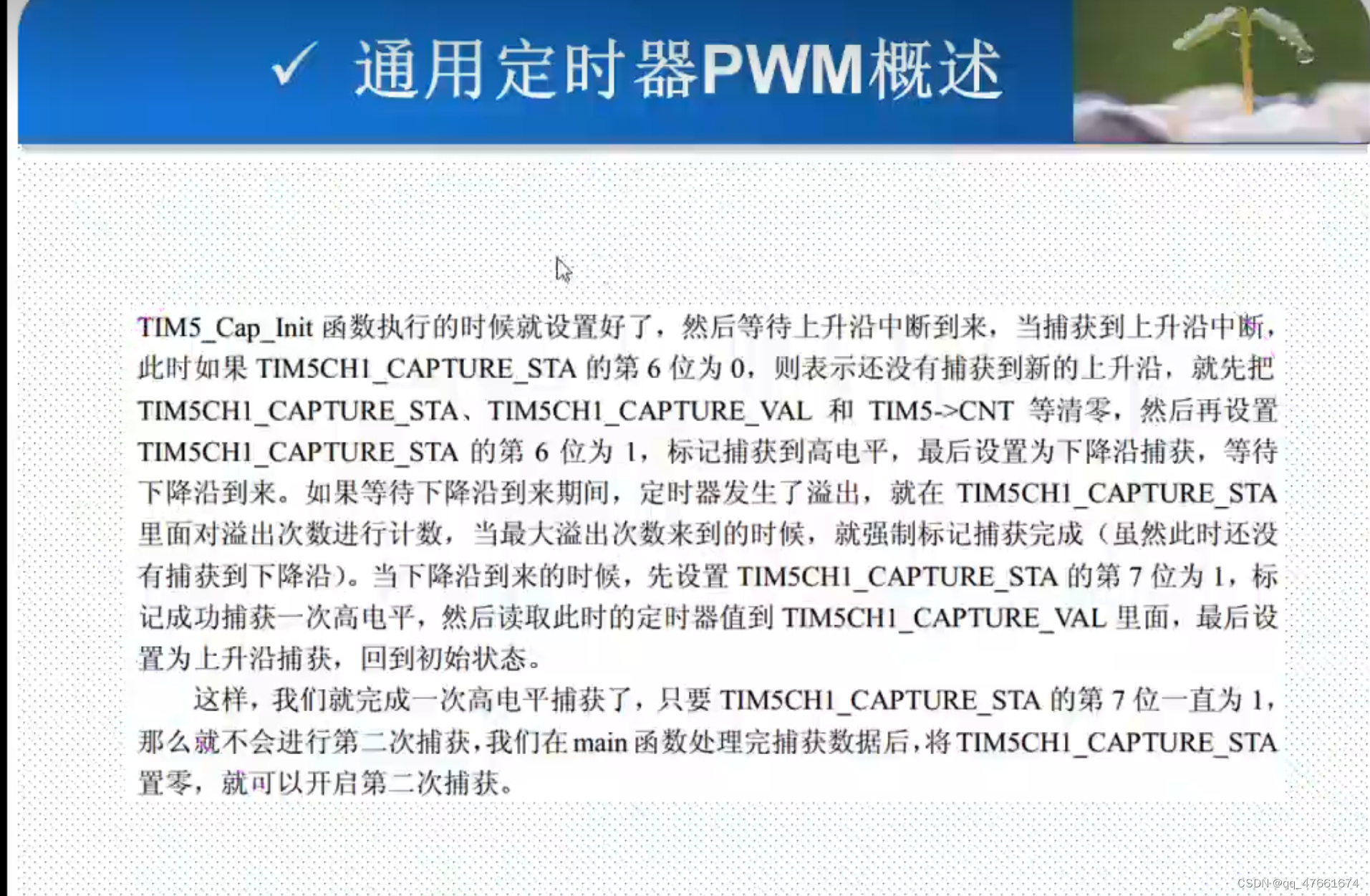
u8 TIM5CH1_CAPTURE_STA = 0; //捕获高电平状态 0x40为捕获到高电平 0x80为捕获到低电平
u32 TIM5CH1_CAPTURE_VAL = 0; //当前捕获值
void TIM5_IRQHandler(void)
{
if((TIM5CH1_CAPTURE_STA & 0x80)== 0) //获取到更新事件,并非上升或者下降事件
{
if(TIM_GetITStatus(TIM5,TIM_IT_Update)!= RESET) //如果获取到更新时间
{
if(TIM5CH1_CAPTURE_STA & 0x40) //如果已经捕获到上升沿
{
if((TIM5CH1_CAPTURE_STA & 0x3F) == 0x3F) //如果TIM5CH1_CAPTURE_STA为0011 1111
{
TIM5CH1_CAPTURE_STA |= 0x80;
TIM5CH1_CAPTURE_VAL = 0xFFFFFFFF;
}
else
TIM5CH1_CAPTURE_STA++;
}
}
if(TIM_GetITStatus(TIM5,TIM_IT_CC1)!= RESET) //捕获1发生捕获事件
{
if(TIM5CH1_CAPTURE_STA &0x40) //捕获到下降沿
{
TIM5CH1_CAPTURE_STA |= 0x80;
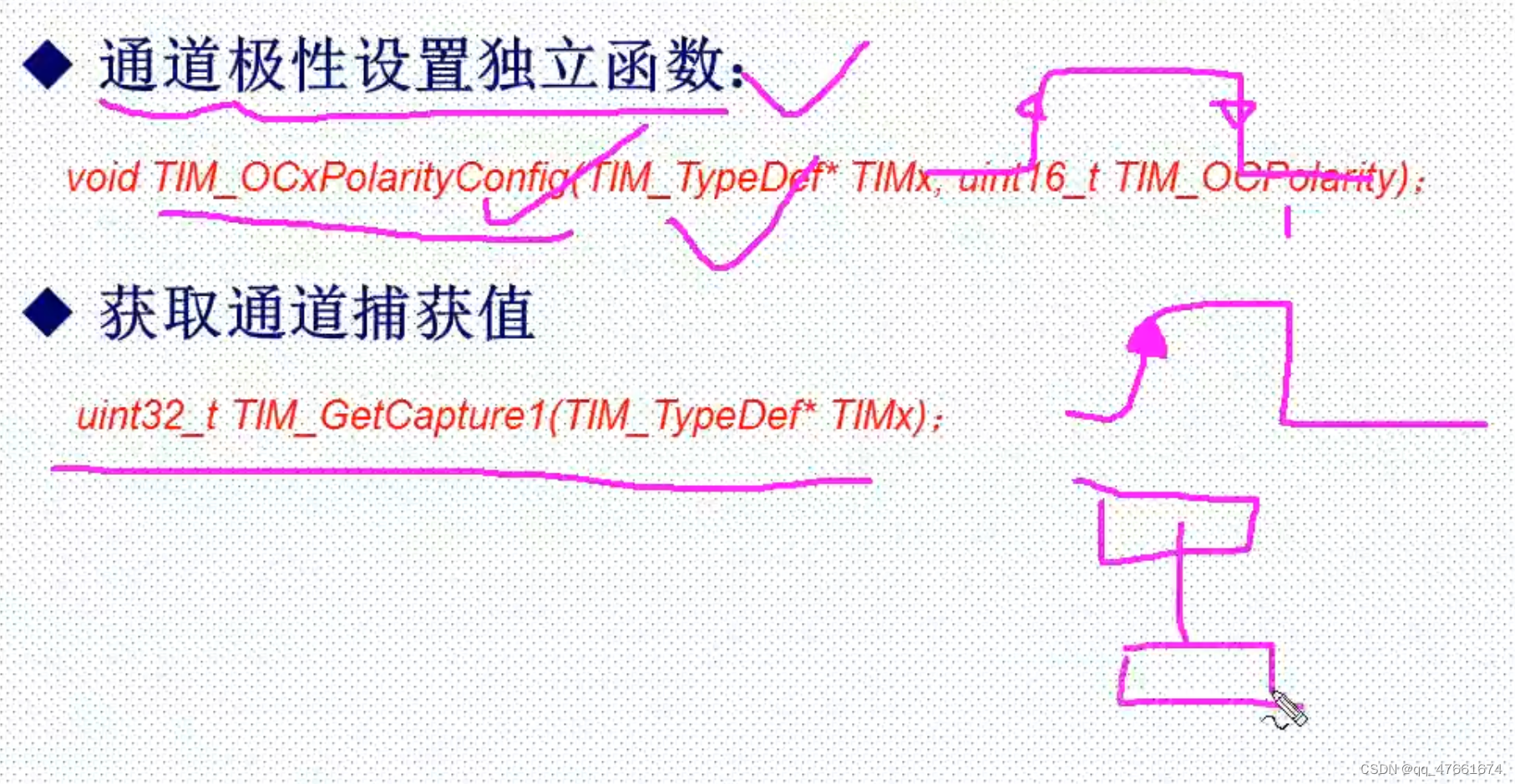
TIM5CH1_CAPTURE_VAL = TIM_GetCapture1(TIM5);
TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising);
}
else //捕获到上升沿
{
TIM5CH1_CAPTURE_STA = 0;
TIM5CH1_CAPTURE_VAL = 0;
TIM5CH1_CAPTURE_STA |=0x40;
TIM_Cmd(TIM5,DISABLE); //更新定时器
TIM_SetCounter(TIM5,0);
TIM_OC1PolarityConfig(TIM5, TIM_ICPolarity_Falling);
TIM_Cmd(TIM5,ENABLE); //更新定时器
}
}
}
TIM_ClearITPendingBit(TIM5,TIM_IT_CC1|TIM_IT_Update);
}















 6313
6313











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









