







Dyna-Q算法
文章转载自《动手学强化学习》https://hrl.boyuai.com/chapter/intro
1.理论部分
Dyna-Q 算法是一个经典的基于模型的强化学习算法。
Dyna-Q 使用一种叫做 Q-planning 的方法来基于模型生成一些模拟数据,然后用模拟数据和真实数据一起改进策略。Q-planning 每次选取一个曾经访问过的状态,采取一个曾经在该状态下执行过的动作,通过模型得到转移后的状态以及奖励,并根据这个模拟数据,用 Q-learning 的更新方式来更新动作价值函数。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3vzGFQlf-1650987203543)(C:\Users\admin\AppData\Roaming\Typora\typora-user-images\image-20220426232346635.png)]](https://img-blog.csdnimg.cn/6b8df04f80bb48698dc2176160816e4b.png)
我的理解是与Q-learning相比就是将过去的交互的数据存在一个字典中,之后训练的时候,每过一段时间从字典中抽取一些数据即(s,a,r,s‘)这种四元组用来更新Q表格,自我感觉和之后DQN中加经验池来利用历史数据的方式有些相识,不同之处在于这里存在字典中的数据相当于从已知模型中获取的数据,说起来就是model-based,而Q-learning,DQN都是model-free。
2.代码实践
代码参考自动手学强化学习(jupyter notebook版本):https://github.com/boyu-ai/Hands-on-RL
使用pycharm打开的请查看:https://github.com/zxs-000202/dsx-rl
方便的话给个star~
import matplotlib.pyplot as plt
import numpy as np
from tqdm import tqdm
import random
import time
class CliffWalkingEnv:
def __init__(self, ncol, nrow):
self.nrow = nrow
self.ncol = ncol
self.x = 0 # 记录当前智能体位置的横坐标
self.y = self.nrow - 1 # 记录当前智能体位置的纵坐标
def step(self, action): # 外部调用这个函数来改变当前位置
# 4种动作, change[0]:上, change[1]:下, change[2]:左, change[3]:右。坐标系原点(0,0)
# 定义在左上角
change = [[0, -1], [0, 1], [-1, 0], [1, 0]]
self.x = min(self.ncol - 1, max(0, self.x + change[action][0]))
self.y = min(self.nrow - 1, max(0, self.y + change[action][1]))
next_state = self.y * self.ncol + self.x
reward = -1
done = False
if self.y == self.nrow - 1 and self.x > 0: # 下一个位置在悬崖或者目标
done = True
if self.x != self.ncol - 1:
reward = -100
return next_state, reward, done
def reset(self): # 回归初始状态,起点在左上角
self.x = 0
self.y = self.nrow - 1
return self.y * self.ncol + self.x
class DynaQ:
""" Dyna-Q算法 """
def __init__(self,
ncol,
nrow,
epsilon,
alpha,
gamma,
n_planning,
n_action=4):
self.Q_table = np.zeros([nrow * ncol, n_action]) # 初始化Q(s,a)表格
self.n_action = n_action # 动作个数
self.alpha = alpha # 学习率
self.gamma = gamma # 折扣因子
self.epsilon = epsilon # epsilon-贪婪策略中的参数
self.n_planning = n_planning #执行Q-planning的次数, 对应1次Q-learning
self.model = dict() # 环境模型
def take_action(self, state): # 选取下一步的操作
if np.random.random() < self.epsilon:
action = np.random.randint(self.n_action)
else:
action = np.argmax(self.Q_table[state])
return action
def q_learning(self, s0, a0, r, s1):
td_error = r + self.gamma * self.Q_table[s1].max(
) - self.Q_table[s0, a0]
self.Q_table[s0, a0] += self.alpha * td_error
def update(self, s0, a0, r, s1):
self.q_learning(s0, a0, r, s1)
self.model[(s0, a0)] = r, s1 # 将数据添加到模型中
for _ in range(self.n_planning): # Q-planning循环
# 随机选择曾经遇到过的状态动作对
(s, a), (r, s_) = random.choice(list(self.model.items()))
self.q_learning(s, a, r, s_)
def DynaQ_CliffWalking(n_planning):
ncol = 12
nrow = 4
env = CliffWalkingEnv(ncol, nrow)
epsilon = 0.01
alpha = 0.1
gamma = 0.9
agent = DynaQ(ncol, nrow, epsilon, alpha, gamma, n_planning)
num_episodes = 300 # 智能体在环境中运行多少条序列
return_list = [] # 记录每一条序列的回报
for i in range(10): # 显示10个进度条
# tqdm的进度条功能
with tqdm(total=int(num_episodes / 10),
desc='Iteration %d' % i) as pbar:
for i_episode in range(int(num_episodes / 10)): # 每个进度条的序列数
episode_return = 0
state = env.reset()
done = False
while not done:
action = agent.take_action(state)
next_state, reward, done = env.step(action)
episode_return += reward # 这里回报的计算不进行折扣因子衰减
agent.update(state, action, reward, next_state)
state = next_state
return_list.append(episode_return)
if (i_episode + 1) % 10 == 0: # 每10条序列打印一下这10条序列的平均回报
pbar.set_postfix({
'episode':
'%d' % (num_episodes / 10 * i + i_episode + 1),
'return':
'%.3f' % np.mean(return_list[-10:])
})
pbar.update(1)
return return_list
np.random.seed(0)
random.seed(0)
n_planning_list = [0, 2, 20]
for n_planning in n_planning_list:
print('Q-planning步数为:%d' % n_planning)
time.sleep(0.5)
return_list = DynaQ_CliffWalking(n_planning)
episodes_list = list(range(len(return_list)))
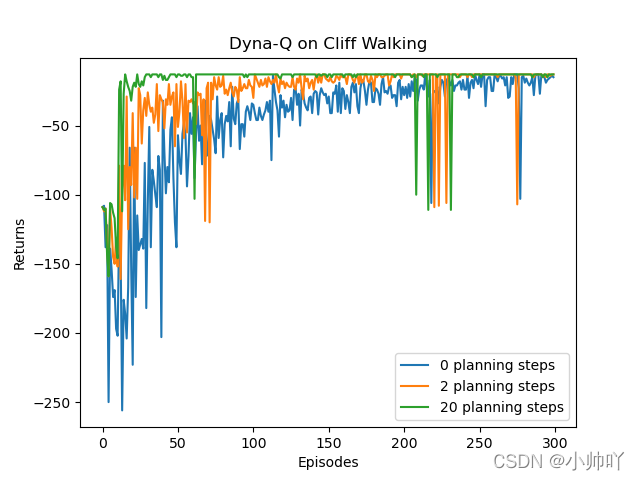
plt.plot(episodes_list,
return_list,
label=str(n_planning) + ' planning steps')
plt.legend()
plt.xlabel('Episodes')
plt.ylabel('Returns')
plt.title('Dyna-Q on {}'.format('Cliff Walking'))
plt.show()















 3269
3269











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









