







麻省理工学院 - MIT - 线性代数(我愿称之为线性代数教程天花板)_哔哩哔哩_bilibili
一、线性方程组的几何图像
二元情况
Ax=b
该方程可以理解为两种图像:行图像和列图像
行图像
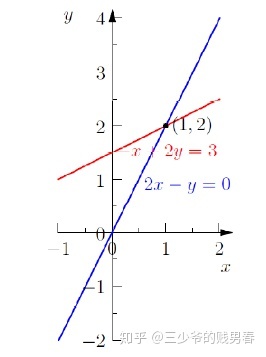
先找出符合方程的两个数组,确定xy平面上两点,连接两点确定代表方程的直线,两条直线的交点为方程组的解;
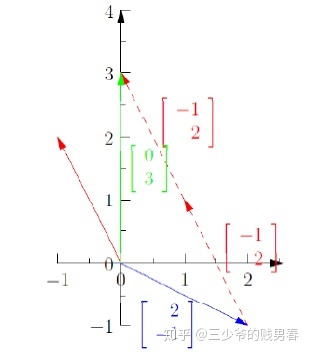
列图像
先将系数矩阵写成列向量的形式,求解原方程变成寻找列向量的线性组合构成向量b
由图可的x=1,y=2
任意取x,y,以上两个列向量的所有线性组合可以布满整个坐标平面
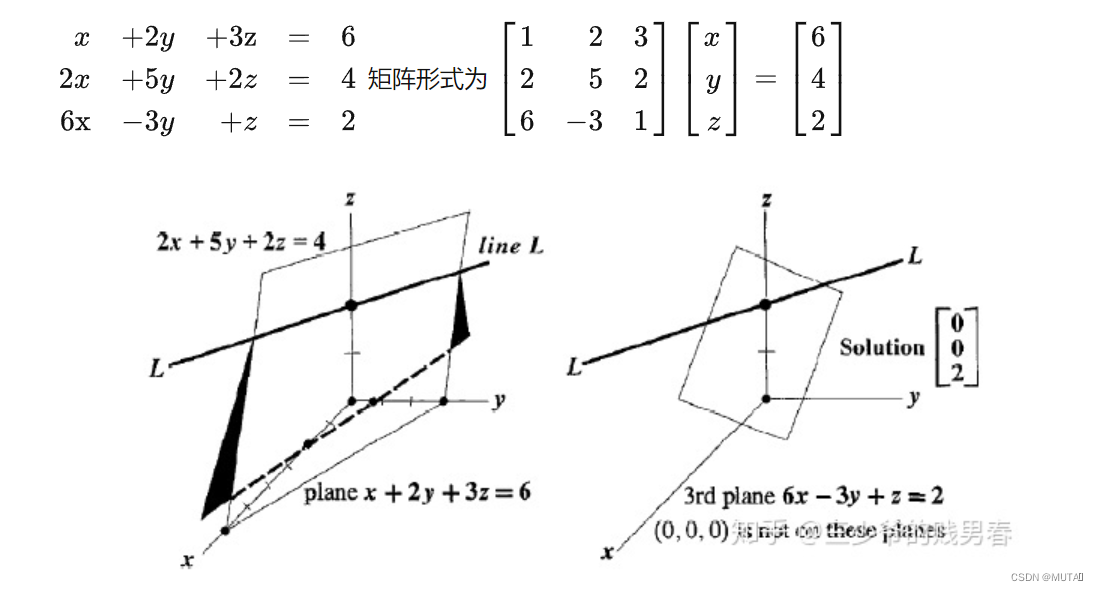
三元情况
Ax=b方程组是否有解?
行图像理解
当方程所代表的三个平面相交于一点时方程有唯一解;三个平面中至少两个平行则方程无解;平面的两两交线互相平行方程也无解;三个平面交于一条直线则方程有无穷多解。
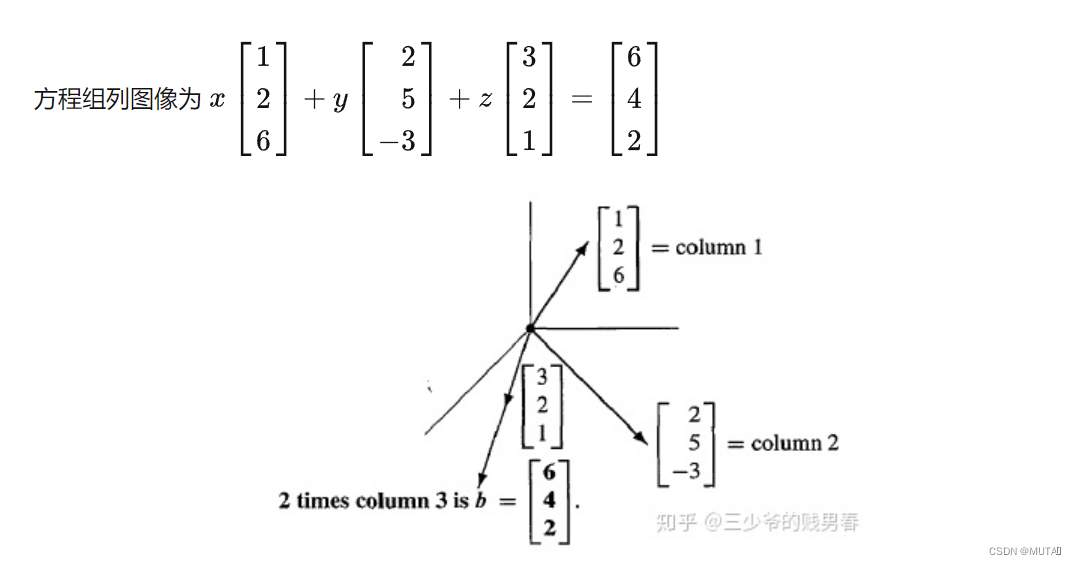
列图像理解
列向量的线性组合是否覆盖整个三维空间?
对于n维情况,n个列向量如果相互独立——线性无关,则方程组有解;否则n个向量线性相关,无法充满n维空间,方程组未必有解
奇异矩阵/不可逆矩阵
三个列向量无论怎么组合也得不到平面外的向量b。此时矩阵A为奇异阵或称不可逆矩阵。
也可以理解为系数矩阵里列(行)向量不是相互独立的
在矩阵A不可逆条件下,不是所有的b都能令方程Ax=b有解。
二、矩阵消元
高斯消元法(Gauss elimination)就是通过对方程组中的某两个方程进行适当的数乘和加(jian)和(fa),以达到将某一未知数系数变为零,从而削减未知数个数的目的。
我们将矩阵左上角的1称之为“主元一”(the first pivot),第一步要通过消元将第一列中除了主元之外的数字均变化为0。操作方法就是用之后的每一行减去第一行的适当倍数,此例中第二行应减去第一行的3倍。之后应对第三行做类似操作,本例中三行第一列数字已经为0,故不用进行操作。

处在第二行第二列的主元二为2,因此用第三行减去第二行的两倍进行消元,得到第三个主元为5。
矩阵A为可逆矩阵,消元结束后得到上三角阵U(Uppertriangular matrix),其左侧下半部分的元素均为0,而主元1,2,5分列在U的对角线上。主元之积即行列式的值。
需要说明的是,主元不能为0,如果恰好消元至某行,0出现在了主元的位置上,应当通过与下方一行进行“行交换”使得非零数字出现在主元位置上。如果0出现在了主元位置上,并且下方没有对等位置为非0数字的行,则消元终止,并证明矩阵A为不可逆矩阵,且线性方程组没有唯一解。
消元矩阵
左行
矩阵左乘行向量则是对矩阵的行向量进行线性组合
右列
系数矩阵乘以未知数向量,相当于对系数矩阵的列向量进行线性组合
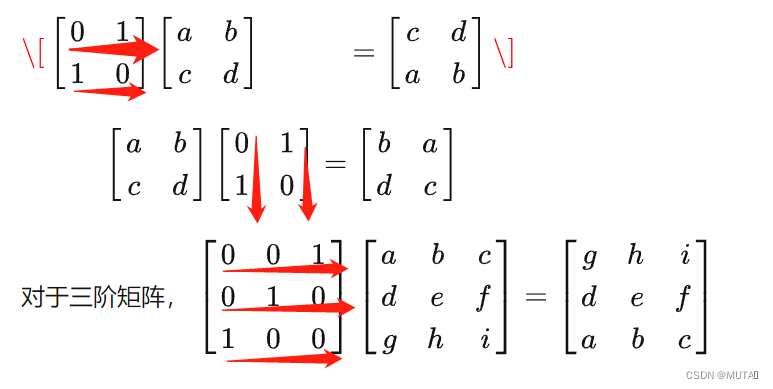
置换矩阵
当应用消元法求解方程组的时候我们需要通过行交换将0从主元位置移走。左乘一个置换阵可以实现行交换的操作
左乘置换矩阵可以完成原矩阵的行变换,右乘置换矩阵则为列变换
置换矩阵P是通过对单位阵进行“行交换”得到的。对于nxn矩阵存在着n!个置换矩阵。置换矩阵具有特殊性质即
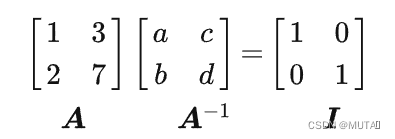
逆矩阵
如果矩阵A是方阵,若存在逆矩阵 A−1 ,使得(左逆矩阵等于右逆矩阵)。我们称矩阵A可逆(invertible)或者矩阵A非奇异(nonsingular)。
反之,如果A为奇异(singular),则其没有逆矩阵。它的行列式为0。另一个等价的说法是,A为奇异阵,则方程Ax=0存在非零解x。例如:
在这个二阶矩阵的例子中,两个列向量排列在同一方向上。不可逆矩阵中总有列向量对生成线性组合没有贡献,等价的说法还有:不可逆矩阵的列向量可以通过线性组合得到0。
换而言之,若矩阵A存在逆矩阵,则方程Ax=0只有零解。证明:反设其存在非零解x,则有
,矛盾;
对于可逆矩阵,求它的逆矩阵是一个重要的问题。
从“列操作”的角度来看,求逆矩阵过程其实和求Ax=b相同,只是这里x为矩阵A−1 的第j列,而b为单位阵I 的第j列。
消元矩阵之逆矩阵的实施效果就是抵消原矩阵的消元操作。消元矩阵实现了对原矩阵A的操作
三、矩阵的运算
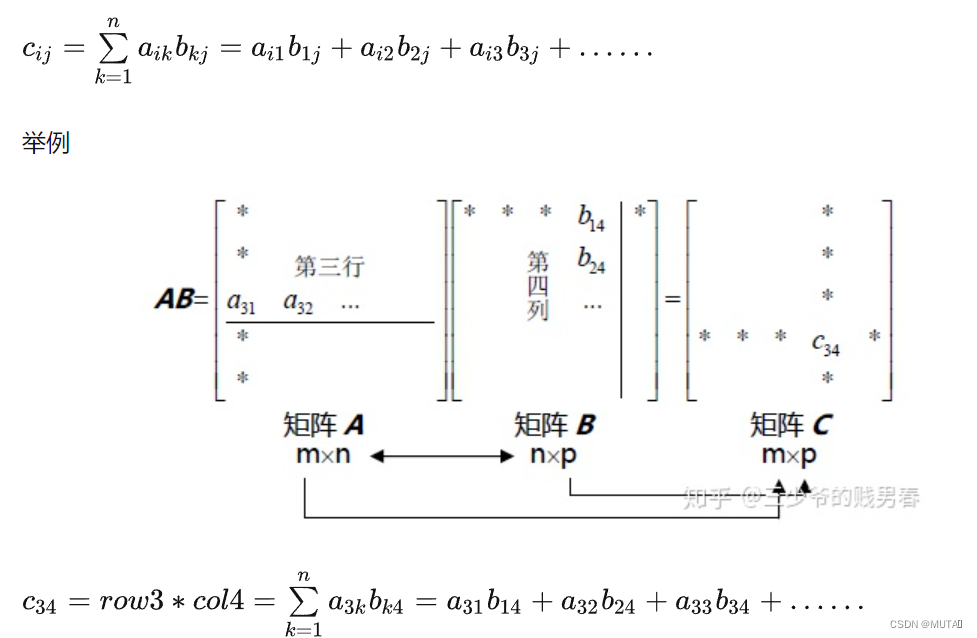
标准方法(行*列)
矩阵乘法的标准计算方法是通过矩阵A第i行的行向量和矩阵B 第j列的列向量点积得到cij。
线性代数笔记3——向量2(点积) - 我是8位的 - 博客园 (cnblogs.com)
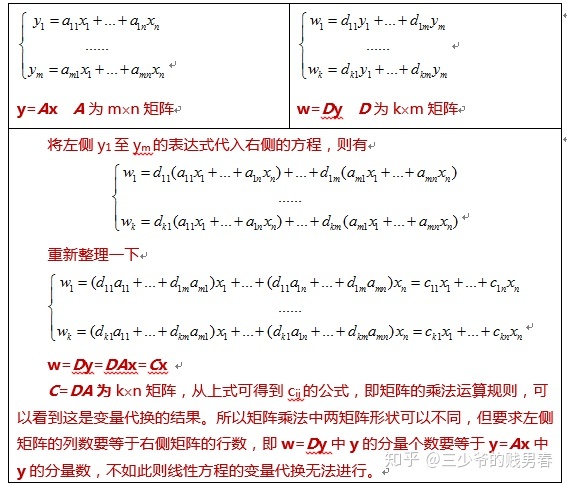
本质上矩阵的代数运算就是线性方程组的运算
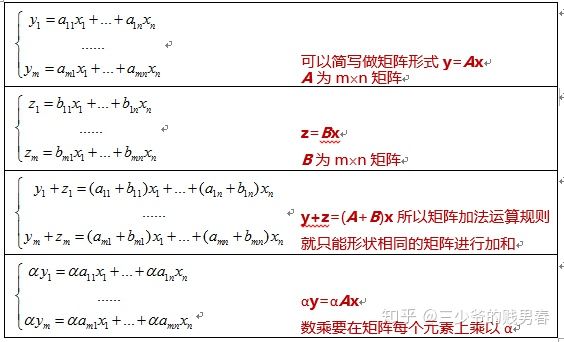
阵乘法可以视为给线性方程组做变量替换
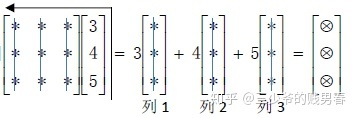
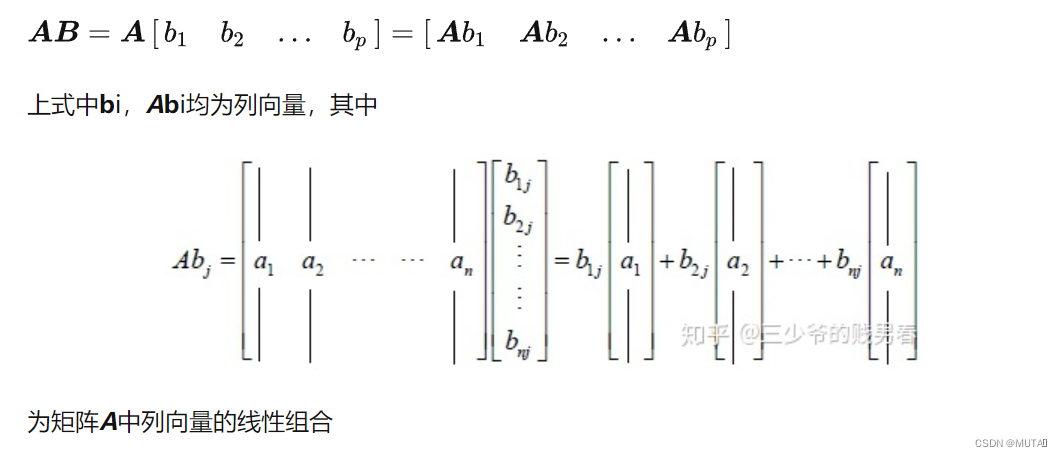
列操作
列操作是指矩阵C的第j列是通过矩阵A乘以矩阵B第j列的列向量得到的。这表明矩阵C的列向量是矩阵A列向量的线性组合
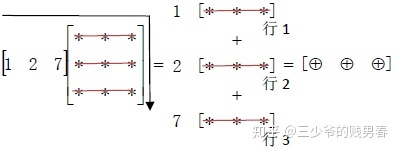
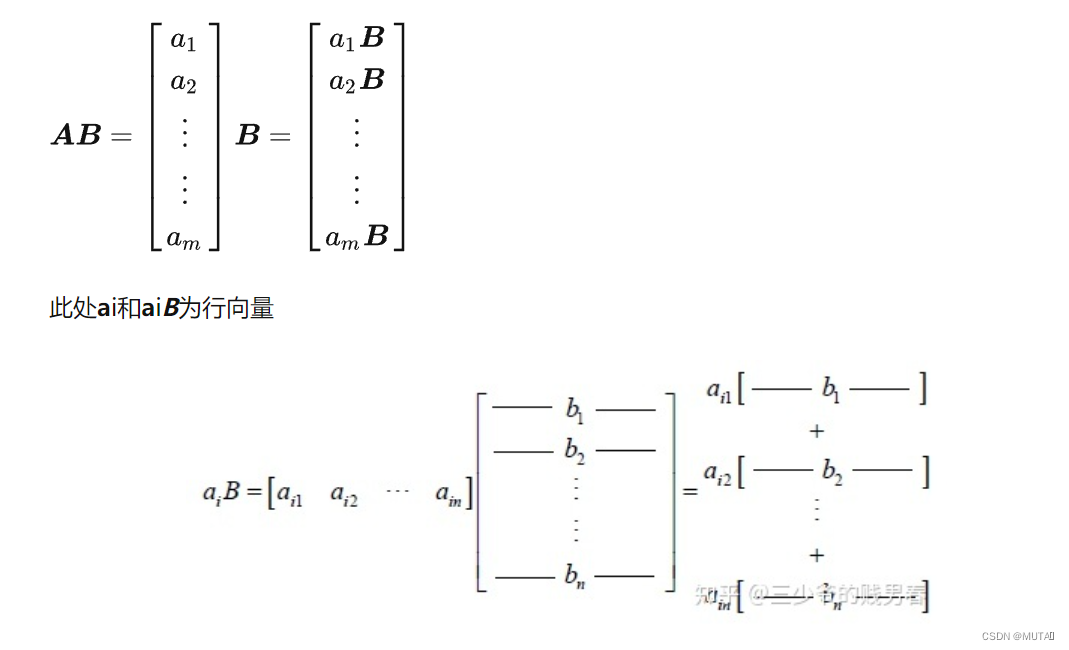
行操作
行操作是指矩阵C的第i行是通过矩阵A的第i行乘以矩阵B得到的。这表明矩阵C的行向量是矩阵B行向量的线性组合。
高斯-若尔当消元法
求逆相当于两组方程:

Gauss-Jordan消元法可以同时处理两个方程:

该过程可以理解为先对A进行一系列消元操作,相当于左乘消元矩阵E
由EA=I 可知E就是A的逆矩阵
相关计算规则(转置和逆)

 四、空间
四、空间
向量空间
我们可以对向量进行所谓“线性运算”,即通过加和(v+w)与数乘运算(3v)得到向量的线性组合。向量空间对线性运算封闭,即空间内向量进行线性运算得到的向量仍在空间之内。
R2即为向量空间,它是具有两个实数分量的所有向量(二维实向量)的集合。
向量 的图像是从原点出发到点(a,b)的箭头,其中第一分量a为横轴坐标,第二分量b为纵轴坐标。空间R2的图像为整个x-y平面。
所有向量空间必然包含零向量,因为任何向量数乘0或者加上反向量都会得到零向量,而因为向量空间对线性运算封闭,所以零向量必属于向量空间。
R3是向量空间,它是具有三个实数分量的所有向量的集合。
Rn是向量空间,它是具有n个实数分量的所有向量的集合。
反例:R2中的第一象限则不是一个向量空间。
子空间
包含于向量空间之内的一个向量空间称为原向量空间的一个子空间。例如用实数c数乘R2空间中向量v所得到的向量集合就是R2空间的一个子空间,其图像为二维平面上穿过原点的一条直线,它对于线性运算封闭。
反例:R2中不穿过原点的直线就不是向量空间。子空间必须包含零向量,原因就是数乘0得到的零向量必须处于子空间中。
“子空间”为包含于向量空间内的一个向量空间。它是原向量空间的一个子集,而且本身也满足向量空间的要求。
R2的子空间包括:
- R2空间本身
- 过原点的一条直线(这是R2空间中的一条直线,与R1空间有区别)
- 原点 仅包含0向量 Z
R3的子空间包括:
- R3空间本身 3维
- 过原点的一个平面 2维
- 过原点的一条直线 1维
- 原点 仅包含0向量 Z
列空间
矩阵A的列空间C(A)是其列向量的所有线性组合所构成的空间
求解Ax=b的问题,对于给定的矩阵A,对于任意的b都能得到解么?
如果 A=
显然并不是所有的b都能保证Ax=b有解,因为它有4个线性方程而只有3个未知数,矩阵A列向量的线性组合无法充满R4,因此如果b不能被表示为A列向量的线性组合时,方程是无解的。只有当b在矩阵A列空间C(A)里时,x才有解。
对于我们所给定的矩阵A,由于列向量不是线性无关的,第三个列向量为前两个列向量之和,所以尽管有3个列向量,但是只有2个对张成向量空间有贡献。矩阵A的列空间为R4(为什么R4,可以理解为列向量是x,y,z,四维)内一个二维子空间。
零空间
矩阵A的零空间N(A)是指满足Ax=0的所有解的集合。
对于所给定这个矩阵A,其列向量含有4个分量,因此列空间是空间R4的子空间,x为含有3个分量的向量,故矩阵A的零空间是R3的子空间。对于mxn矩阵,列空间为Rm的子空间,零空间为Rn空间的子空间。
本例中矩阵A的零空间N(A)为包含 的任何倍数的集合,因为很容易看到第一列向量(1)和第二列向量(1)相加减去第三列向量(-1)为零。此零空间为R3中的一条直线。
b值的影响
若方程变为 ,则其解集不能构成一个子空间。零向量并不在这个集合内。解集是空间R3内过
和
的一个平面,但是并不穿过原点
。
以上给出了关于矩阵的两种子空间,同时给出了两种构造子空间的方法。对于列空间,它是由列向量进行线性组合张成的空间;而零空间是从方程组出发,通过让x满足特定条件而得到的子空间。


















 1138
1138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











