






前言
写这篇文章主要是为了记录作者的安装步骤,作者是个小白,有问题请指出。
环境
ubuntu22.04
ROS2 humble
流程
设置语言环境编码为UTF-8
locale # check for UTF-8
sudo apt update && sudo apt install locales
sudo locale-gen en_US en_US.UTF-8
sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8
export LANG=en_US.UTF-8
locale # verify settings使用 apt 添加 ROS 2 GPG 密钥
sudo apt update && sudo apt install curl
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
这一步我遇到报错Failed to connect to raw.githubusercontent.com
解决方法:
在终端输入
sudo vi /etc/hosts按下回车键 (enter),然后终端输出
按下回车键打开vim编辑器,然后键盘按下 i 键,进入编辑模式,用键盘上面那四个上下左右的调到中间空的那一行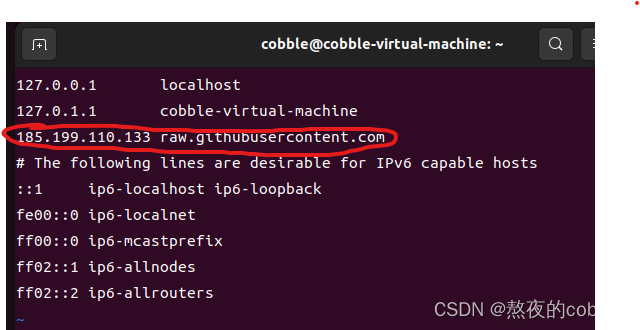
把下面这段代码复制粘贴或自已敲上去
185.199.108.133 raw.githubusercontent.com然后按ESC键,如果代码没问题就用键盘输入(:wq)
注意输入的是括号中的内容,先是:,然后是wq。保存退出。
如果上面这个ip地址和网站没填好或者格式不对,就不输入:wq,而是:q!
不保存修改退出,再输入sudo vi /etc/hosts重新来过。此问题就可以解决。
将存储库添加到您的源列表中(在终端输入)
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null安装 ROS2 软件包
sudo apt update
sudo apt upgradesudo apt install ros-humble-desktop
sudo apt install ros-humble-ros-base
sudo apt install ros-dev-tools设置环境
source /opt/ros/humble/setup.bash
echo " source /opt/ros/humble/setup.bash" >> ~/.bashrc测试系统
启动第一个终端,输入以下命令启动数据发布者节点
ros2 run demo_nodes_cpp talker启动第二个终端,输入以下命令启动数据订阅者节点
ros2 run demo_nodes_py listener发布者发出“Hello World”,而订阅者收到“Hello World”,则验证 C++ 和 Python API 正常工作。安装成功















 5671
5671











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









