






一、ROS2
(一)什么是ROS2?
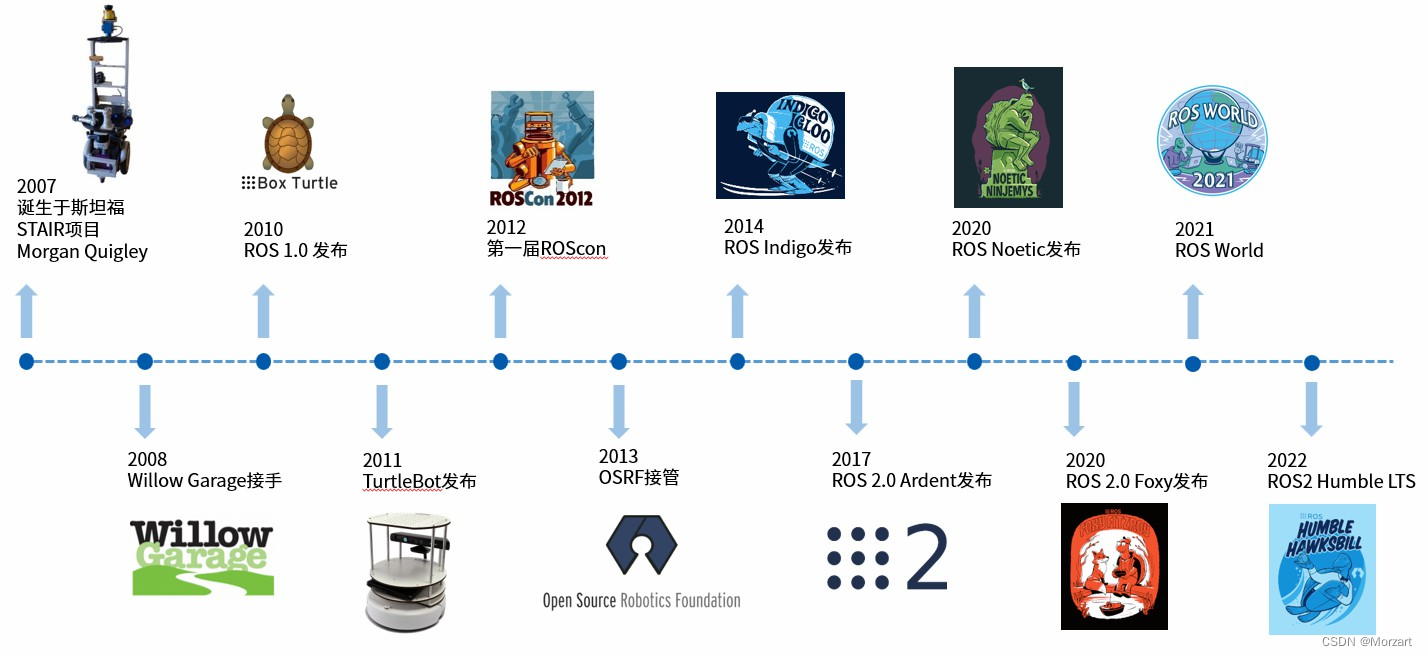
首先,谈到ROS2就不得不谈到它的前序版本:ROS,ROS诞生于2007年的斯坦福大学,他是随着早期PR2机器人诞生的。
2010年,随着PR2机器人的发布,其中的软件正式确定了名称,就叫做机器人操作系统,Robot Operating System,简称为ROS。
而后的时间ROS被越来越多机器人使用,受限于当初设计的局限性,ROS的问题也逐渐暴露。为了能够真正设计一款适用于所有机器人的操作系统,ROS2在2017年底正式发布,历经多年迭代,我们终于在2022年5月底,迎来了ROS2第一个长期支持版——ROS2 Humble,ROS2已经成熟,我们也进入了一个全新的ROS2时代。
- ROS的发展时间轴:
(二)ROS2的安装
我是在VMware虚拟机中在Ubuntu22.04上安装的ROS2,版本为Humble。
1.前期准备
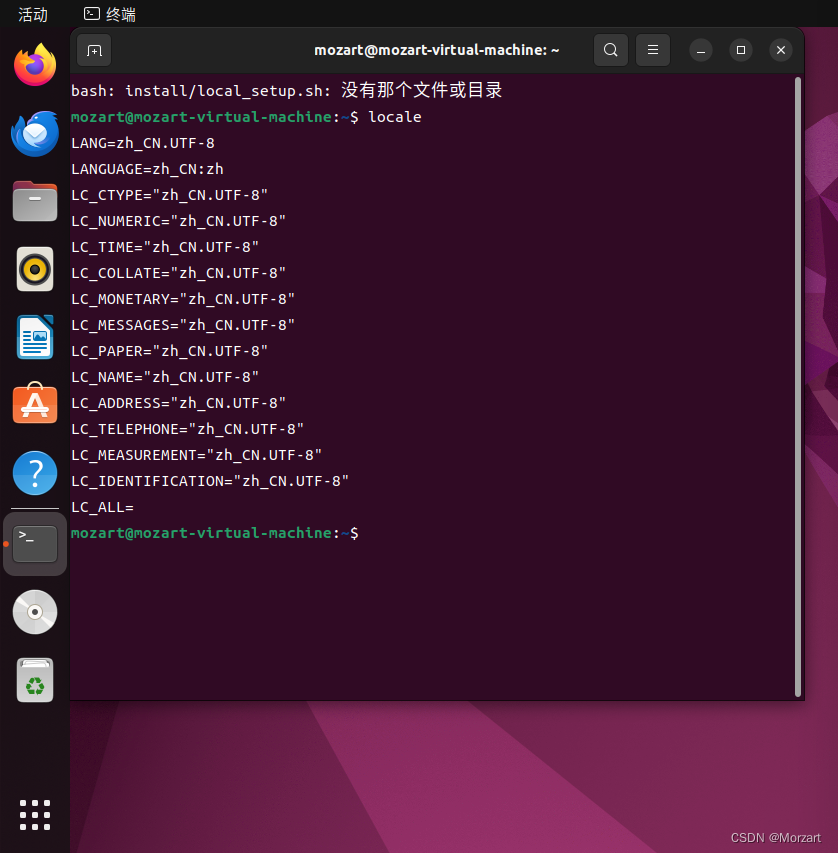
(1)查看语言环境
运行代码检查语言环境是否支持UTF-8
locale
(2)检查镜像网站以及软件更新

点击下载自、其他选项,下滑找到阿里云:

(3)设置软件源
输入指令:
sudo apt update && sudo apt install curl gnupg lsb-release
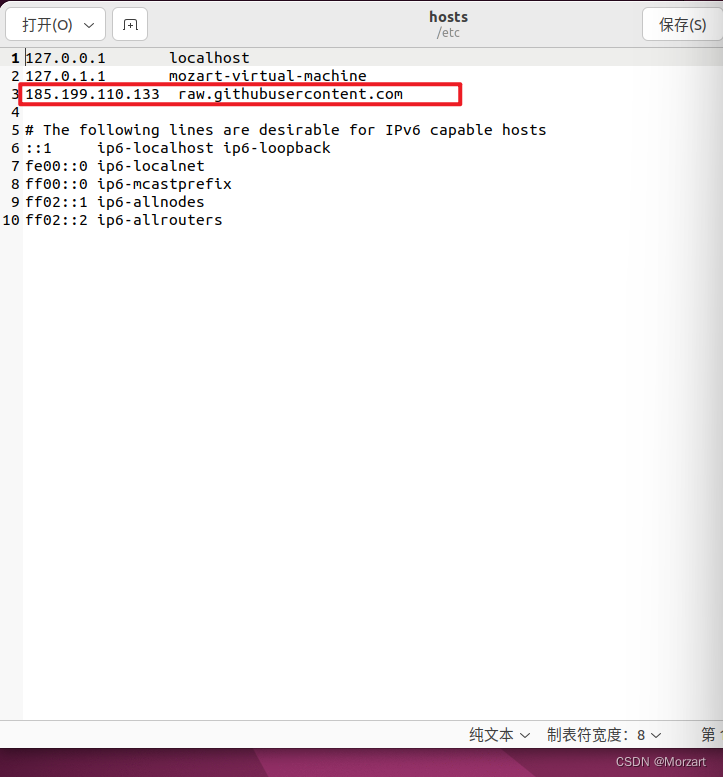
下载完成后,解决DNS问题:
①访问 https://www.ipaddress.com/ ,点击Go to Homepage,并输入域名 raw.githubusercontent.com,查询其 ip 地址
可得到以下几个地址:
185.199.108.133|185.199.109.133|185.199.110.133|185.199.111.133
任意选择一个使用。
②修改/etc/hosts文件:sudo gedit /etc/hosts
③添加域名与IP映射:
解决了DNS,而后执行指令:
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
执行后,再执行指令,将存储库添加到源列表:
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null
2.安装ROS2
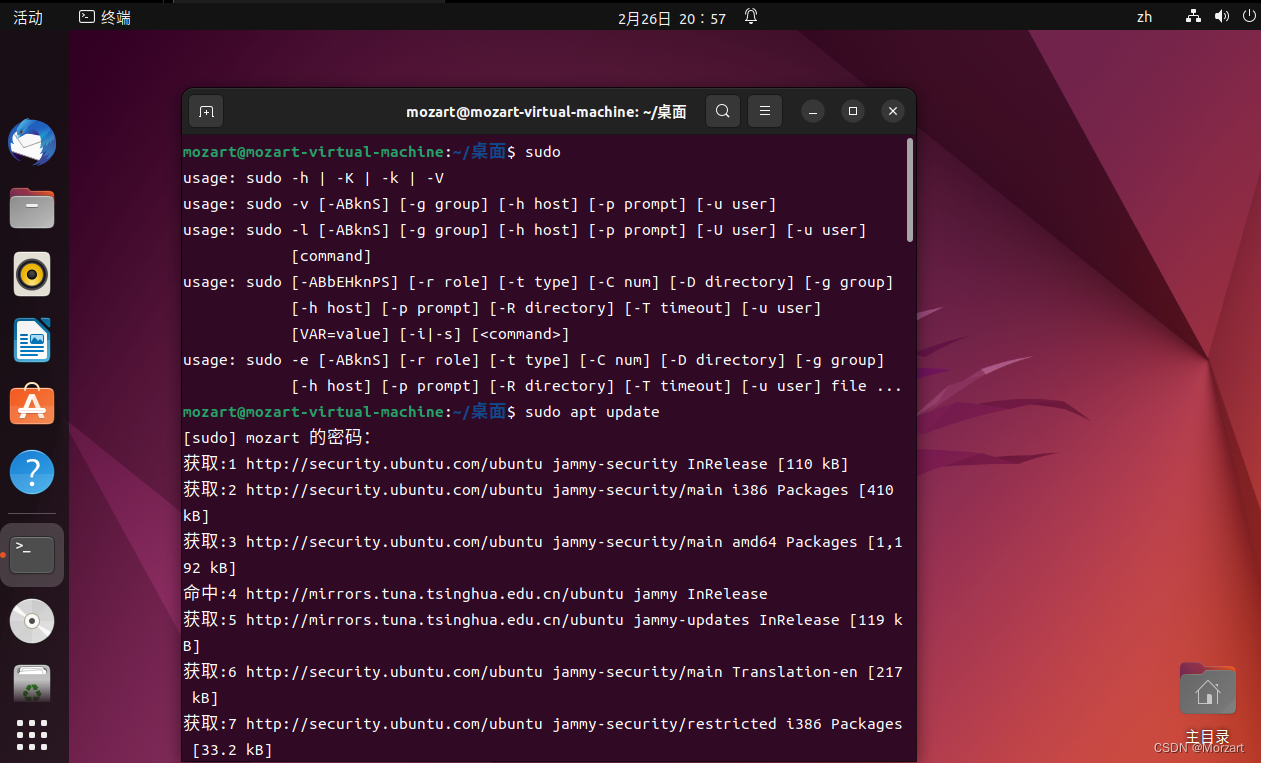
(1)更新apt存储库缓存,并升级软件包
sudo apt update
sudo apt upgrade
(2)安装ROS2-humble桌面版
sudo apt install ros-humble-desktop
安装完成后,可以再次输入上面命令,如返回数据都为0,则已安装成功。

(3)配置环境
使所有shell都能使用
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
执行ros2,查看是否已经完成。
二、小海龟
(一)Turtlesim的运行
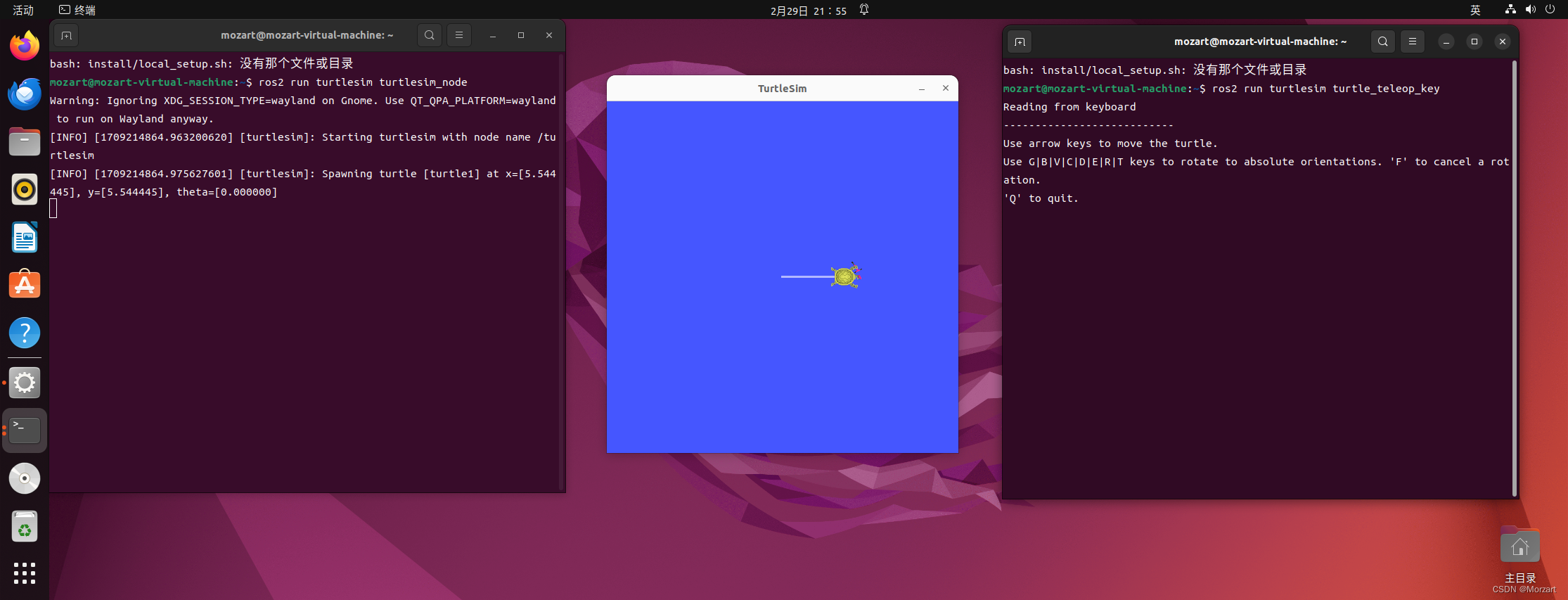
1.启动小海龟仿真器
使用ctrl+alt+t打开一个终端,执行以下命令
ros2 run turtlesim turtlesim_node
2.启动海龟控制节点
再次使用ctrl+alt+t打开一个新的终端,执行以下命令
ros2 run turtlesim turtle_teleop_key
在第二个终端中使用方向键控制小海龟
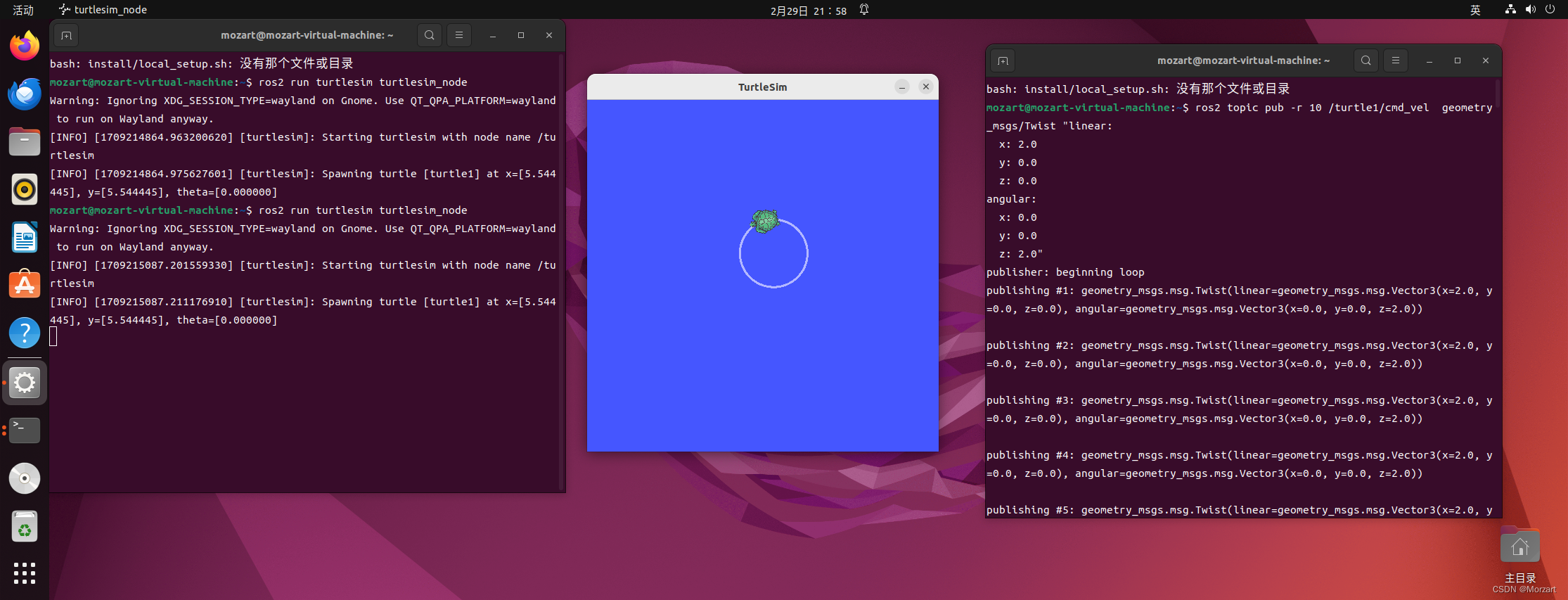
(二)使用命令控制小海龟画圆
1.打开小海龟
ros2 run turtlesim turtlesim_node
2.执行指令
打开新的终端,执行以下指令:
ros2 topic pub -r 10 /turtle1/cmd_vel geometry_msgs/Twist "linear:
x: 2.0
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 2.0"
三、总结
ROS2-humble因为是才出来的版本,所以教程有点难找,还是建议使用ROS,不然很折磨。并且如果可以,尽量去直接阅读ROS2的手册进行操作。下面引用中有humble的手册。
四、引用
ROS 2 Documentation:Humble
古月居
【不会是要长脑子了吧】Ubuntu22.04安装ROS2【图文讲解】














 9582
9582











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









