






EfficientNet V2
EfficientNetV1中,关注的更多是模型的Flops,产生了一系列问题。
- 训练图像尺寸过大时,训练速度过慢。
- 在网络浅层中使用Depthwise convolutions速度会很慢
- 同等的放大每个stage是次优的(即简单地增加网络的深度、宽度或输入分辨率并不能同时保证模型的准确性和效率。)
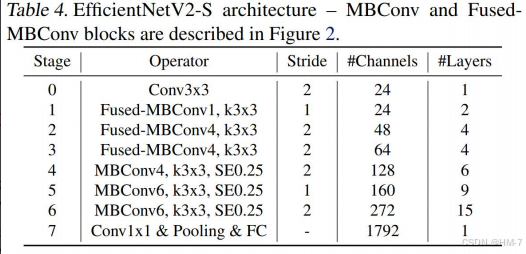
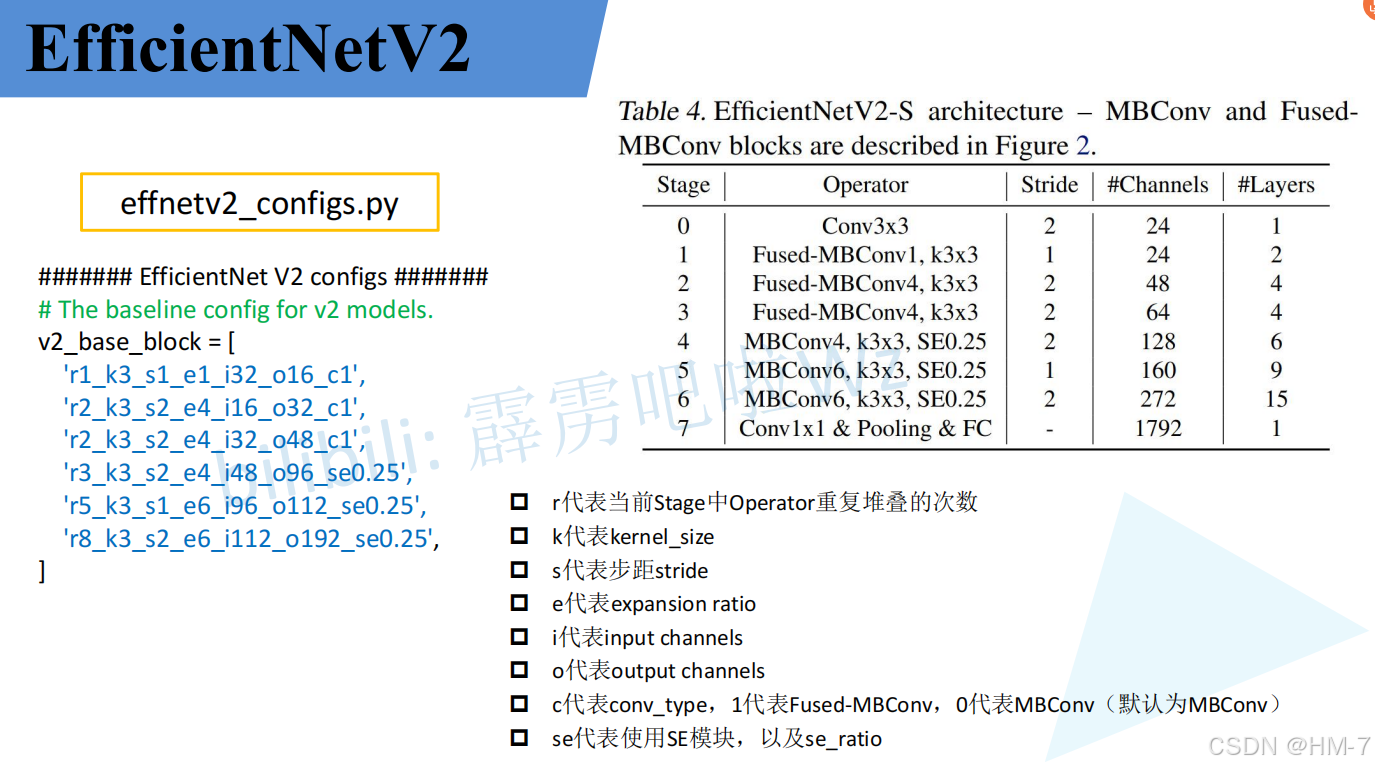
网络框架
- 除了使用MBConv模块,还使用Fused-MBConv模块
- 会使用较小的expansion ratio
- 偏向使用更小的kernel_size(3x3)
- 移除了EfficientNetV1中最后一个步距为1的stage(V1中
的stage8)
Fused-MBConv模块
在网络浅层中使用Depthwise convolutions速度会很慢。无法充分利用现有的一
些加速器(虽然理论上计算量很小,但实际使用起来并没有想象中那么快)。
故引入Fused-MBConv结构。
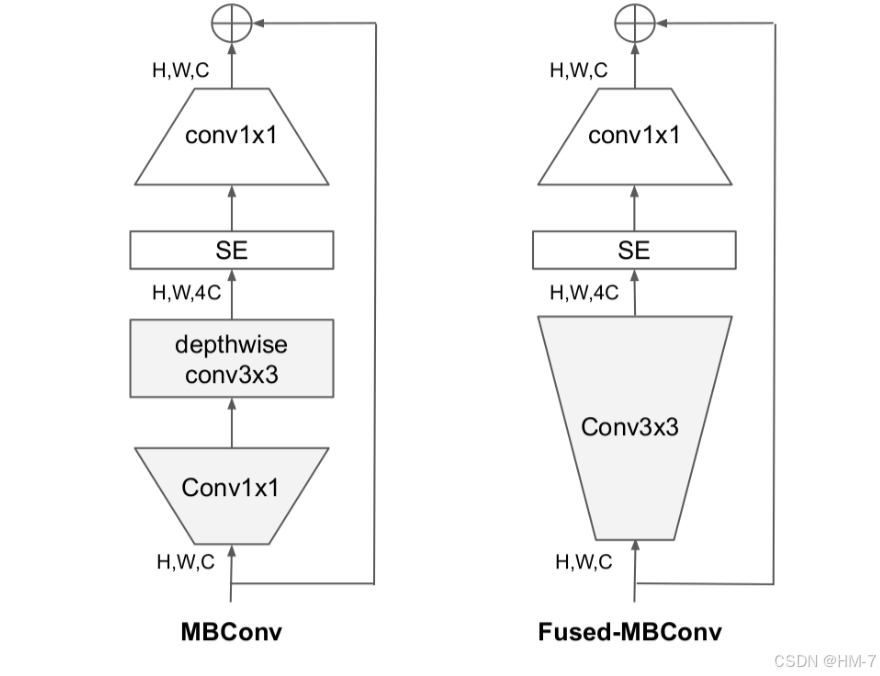
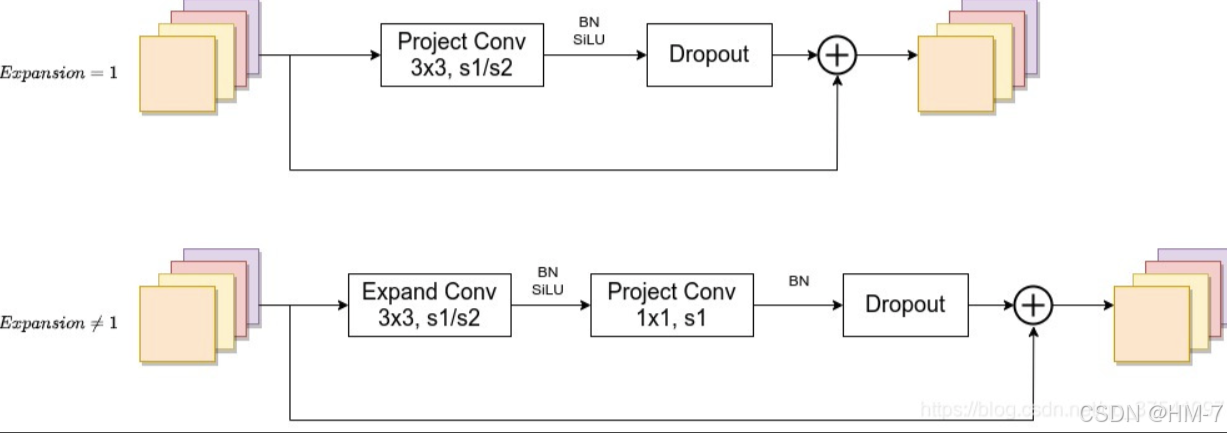
结构相较于MBConv,减少了一开始的1x1的升维卷积和3x3的DW卷积,取而代之的是3x3的普通卷积。当Expansion为1时,仅有一个3x3的升维卷积,不为一时为expand3x3卷积和1x1的升维卷积。
这里的Expansion即为结构图中conv后的数字即expand_ratio。
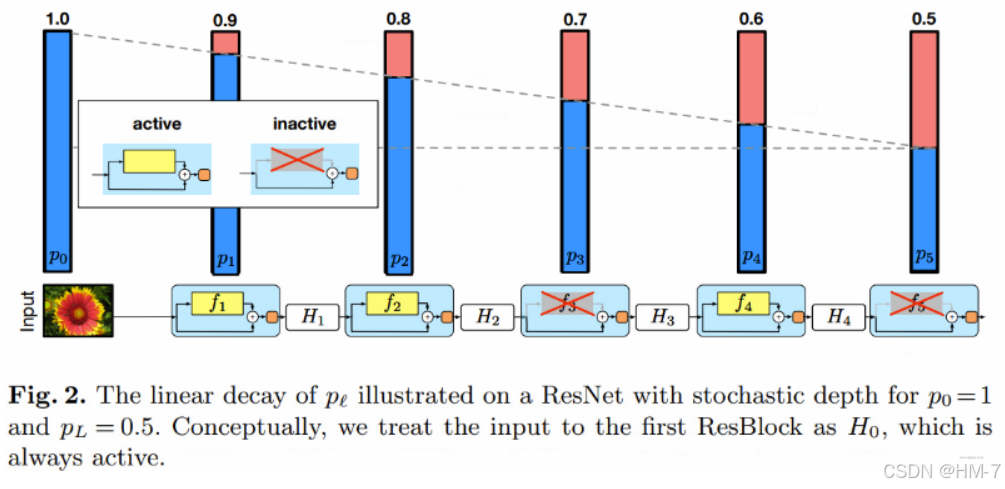
随机深度
具有残差块的网络训练时间过久,为了解决此问题,引入了随机深度的技术。即在我们可以在训练过程中任意地丢弃一些层,并在测试过程中使用完整的网络。通常是通过在训练过程中随机地选择网络中的某些层来“激活”或“禁用”,从而改变网络的结构。这种方法可以让网络在每次前向传播时都采用不同的深度,使其在训练中接触到多种网络配置。
基本思想
在训练中,如果一个特定的残差块被启用了,那么它的输入就会同时流经恒等表换shortcut(identity shortcut)和权重层;否则输入就只会流经恒等变换shortcut。
在训练的过程中,每一个层都有一个“生存概率”,并且都会被任意丢弃。在测试过程中,所有的block都将保持被激活状态,而且block都将根据其在训练中的生存概率进行调整。
假设H1是第一个残差块的输出结果。f1是第一个残差块主分支的输出,b1是一个随机变量(只有1或者0,反映一个block是否是被激活的,或者是否启用当前主分支)。那么加了随机深度的Dropout之后的残差块输出公式计算如下:

原先的残差结构,即跳跃连接+主分支后接激活函数,此时仅多了b1来控制主分支是否有效,即block是否激活。若b1=0则:
此时即直接走跳跃连接,此时主分支不起作用即当前残差块失活。
作者通过优化公式,且一个“线性衰减规律”应用于每一层的生存概率,他们表示,由于较早的层会提取低级特征,而这些低级特征会被后面的层所利用,所以这些层不应该频繁地被丢弃。这样,最终生成的规则就变成了这样:
pl表示在l层训练的存活概率,L表示block的数量,PL即输入的dropout_rate,l为第l层的残差块。
具体分析下实现代码:
在droppath函数中:
- 首先进行判断,此时丢弃概率或是否处于训练模式,不符合则退出。
- 计算保留概率
keep_prob=1-drop_prob - 然后根据输入张量的批次大小生成随机张量的形状。创建一个批次维度后跟随大小为 1 的维度,以适应不同形状的张量(例如 2D、3D 等)。
- 创建一个随机张量,其中每个元素均来自均匀分布。这个张量将用于决定是否丢弃某个路径。通过加上 keep_prob,其值范围从 keep_prob 到 1 + keep_prob。
- 使用向下取整操作对张量进行二值化。将大于或等于 1 的值设为 1(活跃路径),小于 1 的值设为 0(丢弃路径)
- 输出通过将输入张量 x 除以 keep_prob(以适当缩放激活值),然后乘以 random_tensor 来计算。这有效地丢弃了某些路径,同时保持整体输出的比例。
def drop_path(x, drop_prob: float = 0., training: bool = False):
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
# 根据输入张量的批次大小生成随机张量的形状。创建一个批次维度后跟随大小为 1 的维度,以适应不同形状的张量(例如 2D、3D 等)。
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNets
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_() # binarize
output = x.div(keep_prob) * random_tensor
return output
class DropPath(nn.Module):
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
代码实现
Model
与V1中类似,首先定义Dropout的处理函数。
def drop_path(x, drop_prob: float = 0., training: bool = False):
if drop_prob == 0. or not training:
return x
keep_prob = 1 - drop_prob
# 根据输入张量的批次大小生成随机张量的形状。创建一个批次维度后跟随大小为 1 的维度,以适应不同形状的张量(例如 2D、3D 等)。
shape = (x.shape[0],) + (1,) * (x.ndim - 1) # work with diff dim tensors, not just 2D ConvNets
random_tensor = keep_prob + torch.rand(shape, dtype=x.dtype, device=x.device)
random_tensor.floor_() # binarize
output = x.div(keep_prob) * random_tensor
return output
class DropPath(nn.Module):
def __init__(self, drop_prob=None):
super(DropPath, self).__init__()
self.drop_prob = drop_prob
def forward(self, x):
return drop_path(x, self.drop_prob, self.training)
定义卷积BN激活通用方法和SE模块
class ConvBNAct(nn.Module):
def __init__(self,
in_planes: int,
out_planes: int,
kernel_size: int = 3,
stride: int = 1,
groups: int = 1,
norm_layer: Optional[Callable[..., nn.Module]] = None,
activation_layer: Optional[Callable[..., nn.Module]] = None):
super(ConvBNAct, self).__init__()
padding = (kernel_size - 1) // 2
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if activation_layer is None:
activation_layer = nn.SiLU
self.conv = nn.Conv2d(in_channels=in_planes,
out_channels=out_planes,
kernel_size=kernel_size,
stride=stride,
padding=padding,
groups=groups,
bias=False)
self.bn = norm_layer(out_planes)
self.act = activation_layer()
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.act(x)
return x
class SqueezeExcitation(nn.Module):
def __init__(self,
input_c: int,
expand_c: int,
se_ratio: float = 0.25):
super(SqueezeExcitation, self).__init__()
squeeze_c = int(input_c * se_ratio)
self.conv_reduce = nn.Conv2d(expand_c, squeeze_c, 1)
self.act1 = nn.SiLU()
self.conv_expand = nn.Conv2d(squeeze_c, expand_c, 1)
self.act2 = nn.Sigmoid()
def forward(self, x):
scale = x.mean((2, 3), keepdim=True)
scale = self.conv_reduce(scale)
scale = self.act1(scale)
scale = self.conv_expand(scale)
scale = self.act2(scale)
return scale * x
定义MBConv块结构
class MBConv(nn.Module):
def __init__(self,
kernel_size: int,
input_c: int,
out_c: int,
expand_ratio: int,
stride: int,
se_ratio: float,
drop_rate: float,
norm_layer: Callable[..., nn.Module]):
super(MBConv, self).__init__()
if stride not in [1, 2]:
raise ValueError('Stride must be 1 or 2.')
self.has_shortcut = (stride == 1 and input_c == out_c)
activation_layer = nn.SiLU
expand_c = input_c * expand_ratio
assert expand_ratio != 1
self.expand_conv = ConvBNAct(in_planes=input_c
, out_planes=expand_c,
kernel_size=1,
norm_layer=norm_layer,
activation_layer=activation_layer)
# DW
self.dwconv = ConvBNAct(in_planes=expand_c,
out_planes=expand_c,
kernel_size=kernel_size,
stride=stride,
groups=expand_c,
norm_layer=norm_layer,
activation_layer=activation_layer)
self.se = SqueezeExcitation(input_c, expand_c, se_ratio) if se_ratio > 0 else nn.Identity()
self.project_conv = ConvBNAct(in_planes=expand_c,
out_planes=out_c,
kernel_size=1,
norm_layer=norm_layer,
activation_layer=nn.Identity)
self.out_channels = out_c
self.drop_rate = drop_rate
if self.has_shortcut and drop_rate > 0:
self.dropout = DropPath(drop_rate)
def forward(self, x):
result = self.expand_conv(x)
result = self.dwconv(result)
result = self.se(result)
result = self.project_conv(result)
if self.has_shortcut:
if self.drop_rate > 0:
result = self.dropout(result)
result += x
return result
定义FusedMBConv块结构,注意此时对于Expansion的判断,不同的值具有不同的结构。且具有shortcut结构和rate不为0时启用dropout失活。
class FusedMBConv(nn.Module):
def __init__(self,
kernel_size: int,
input_c: int,
out_c: int,
expand_ratio: int,
stride: int,
se_ratio: float,
drop_rate: float,
norm_layer: Callable[..., nn.Module]):
super(FusedMBConv, self).__init__()
assert stride in [1, 2]
assert se_ratio == 0
self.has_shortcut = (stride == 1 and input_c == out_c)
self.drop_rate = drop_rate
self.has_expansion = expand_ratio != 1
activation_layer = nn.SiLU
expanded_c = input_c * expand_ratio
# expand radio != 1时具有expand conv
if self.has_expansion:
self.expand_conv = ConvBNAct(in_planes=input_c,
out_planes=expanded_c,
kernel_size=kernel_size,
stride=stride,
norm_layer=norm_layer,
activation_layer=activation_layer)
# 此时没有激活函数
self.project_conv = ConvBNAct(in_planes=expanded_c,
out_planes=out_c,
kernel_size=1,
norm_layer=norm_layer,
activation_layer=nn.Identity)
else:
self.project_conv = ConvBNAct(in_planes=input_c,
out_planes=out_c,
kernel_size=kernel_size,
stride=stride,
norm_layer=norm_layer,
activation_layer=activation_layer)
self.out_channels = out_c
self.drop_rate = drop_rate
if self.has_shortcut and drop_rate > 0:
self.dropout = DropPath(drop_rate)
def forward(self, x):
if self.has_expansion:
result = self.expand_conv(x)
result = self.project_conv(result)
else:
result = self.project_conv(x)
if self.has_shortcut:
if self.drop_rate > 0:
result = self.dropout(result)
result += x
return result
定义网络主体结构
class EfficientNetV2(nn.Module):
def __init__(self,
model_cnf: list,
num_classes: int = 1000,
num_features: int = 1280, # 最后一层卷积的核个数
dropout_rate: float = 0.2,
drop_connect_rate: float = 0.2):
super(EfficientNetV2, self).__init__()
for cnf in model_cnf:
assert len(cnf) == 8
norm_layer = partial(nn.BatchNorm2d, eps=1e-3, momentum=0.1)
# 获取input_channel
stem_filter_num = model_cnf[0][4]
# 第一层卷积
self.stem = ConvBNAct(in_planes=3,
out_planes=stem_filter_num,
kernel_size=3,
stride=2,
norm_layer=norm_layer) # 默认为SiLU
total_blocks = sum(i[0] for i in model_cnf)
block_id = 0
blocks = []
for cnf in model_cnf:
repeats = cnf[0]
# 判断使用什么模块
op = FusedMBConv if cnf[-2] == 0 else MBConv
for i in range(repeats):
blocks.append(op(kernel_size=cnf[1],
input_c=cnf[4] if i == 0 else cnf[5], # 堆叠block除第一个block外其余block的input=output
out_c=cnf[5],
expand_ratio=cnf[3],
stride=cnf[2] if i == 0 else 1,
se_ratio=cnf[-1],
drop_rate=drop_connect_rate * block_id / total_blocks,
norm_layer=norm_layer
))
block_id += 1
self.blocks = nn.Sequential(*blocks)
head_input_c = model_cnf[-1][-3]
head = OrderedDict()
head.update({"project_conv": ConvBNAct(head_input_c,
num_features,
kernel_size=1,
norm_layer=norm_layer)})
head.update({"avgpool": nn.AdaptiveAvgPool2d(1)})
head.update({"flatten": nn.Flatten()})
if dropout_rate > 0:
head.update({"dropout": nn.Dropout(dropout_rate, inplace=True)})
head.update({"classifier": nn.Linear(num_features, num_classes)})
self.head = nn.Sequential(head)
# initial weights
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_out")
if m.bias is not None:
nn.init.zeros_(m.bias)
elif isinstance(m, nn.BatchNorm2d):
nn.init.ones_(m.weight)
nn.init.zeros_(m.bias)
elif isinstance(m, nn.Linear):
nn.init.normal_(m.weight, 0, 0.01)
nn.init.zeros_(m.bias)
def forward(self, x):
x = self.stem(x)
x = self.blocks(x)
x = self.head(x)
return x
定义网络参数函数。
def efficientnetv2_s(num_classes: int = 1000):
"""
EfficientNetV2
https://arxiv.org/abs/2104.00298
"""
# train_size: 300, eval_size: 384
# repeat, kernel, stride, expansion, in_c, out_c, operator, se_ratio
model_config = [[2, 3, 1, 1, 24, 24, 0, 0],
[4, 3, 2, 4, 24, 48, 0, 0],
[4, 3, 2, 4, 48, 64, 0, 0],
[6, 3, 2, 4, 64, 128, 1, 0.25],
[9, 3, 1, 6, 128, 160, 1, 0.25],
[15, 3, 2, 6, 160, 256, 1, 0.25]]
model = EfficientNetV2(model_cnf=model_config,
num_classes=num_classes,
dropout_rate=0.2)
return model
def efficientnetv2_m(num_classes: int = 1000):
"""
EfficientNetV2
https://arxiv.org/abs/2104.00298
"""
# train_size: 384, eval_size: 480
# repeat, kernel, stride, expansion, in_c, out_c, operator, se_ratio
model_config = [[3, 3, 1, 1, 24, 24, 0, 0],
[5, 3, 2, 4, 24, 48, 0, 0],
[5, 3, 2, 4, 48, 80, 0, 0],
[7, 3, 2, 4, 80, 160, 1, 0.25],
[14, 3, 1, 6, 160, 176, 1, 0.25],
[18, 3, 2, 6, 176, 304, 1, 0.25],
[5, 3, 1, 6, 304, 512, 1, 0.25]]
model = EfficientNetV2(model_cnf=model_config,
num_classes=num_classes,
dropout_rate=0.3)
return model
def efficientnetv2_l(num_classes: int = 1000):
"""
EfficientNetV2
https://arxiv.org/abs/2104.00298
"""
# train_size: 384, eval_size: 480
# repeat, kernel, stride, expansion, in_c, out_c, operator, se_ratio
model_config = [[4, 3, 1, 1, 32, 32, 0, 0],
[7, 3, 2, 4, 32, 64, 0, 0],
[7, 3, 2, 4, 64, 96, 0, 0],
[10, 3, 2, 4, 96, 192, 1, 0.25],
[19, 3, 1, 6, 192, 224, 1, 0.25],
[25, 3, 2, 6, 224, 384, 1, 0.25],
[7, 3, 1, 6, 384, 640, 1, 0.25]]
model = EfficientNetV2(model_cnf=model_config,
num_classes=num_classes,
dropout_rate=0.4)
return model
Train
train中与V1类似。加入了余弦退火(Cosine Annealing)策略来调节学习率。目的即使学习率在开始训练时很大,在训练过程中逐渐变小,在结束时达到一个最小值。利用余弦函数操作。
lf = lambda x: ((1 + math.cos(x * math.pi / args.epochs)) / 2) * (1 - args.lrf) + args.lrf # cosine
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
math.cos(x * math.pi / args.epochs):计算余弦值,随x的变化而变化。当x从0变换到arg.epochs时,余弦值从-1变化到1。((1 + math.cos(x * math.pi / args.epochs)) / 2):通过这个操作,余弦值被转换到 [0, 1] 的范围内。*(1 - args.lrf)和+ args.lrf:最后,函数将计算结果缩放并偏移,使得学习率在args.lrf和 1 之间变化。其中args.lrf是学习率的最小值,1是学习率的初始值。- 最后使用学习率调度器,在每个epochs中计算学习率。
lr_scheduler.LambdaLR是 PyTorch 中的一个学习率调度器,用于根据提供的 lambda 函数动态调整学习率。optimizer是用于更新模型参数的优化器。lr_lambda=lf将之前定义的 lambda 函数 lf 传递给调度器,以便在每个 epoch 中计算学习率。
完整代码:
import argparse
import math
import os
import torch
from torch import optim
from torch.optim import lr_scheduler
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
from torchvision import transforms
from model import efficientnetv2_s as create_model
from my_dataset import MyDataSet
from utils import read_split_data, train_one_epoch, evaluate
def main(args):
device = torch.device(args.device if torch.cuda.is_available() else "cpu")
print(args)
tb_writer = SummaryWriter()
if os.path.exists('./weights') is False:
os.makedirs('./weights')
train_images_path, train_images_label, val_images_path, val_images_label = read_split_data(args.data_path)
img_size = {"s": [300, 384], # train_size, val_size
"m": [384, 480],
"l": [384, 480]}
num_model = "s"
data_transform = {
"train": transforms.Compose([transforms.RandomResizedCrop(img_size[num_model][0]),
transforms.RandomHorizontalFlip(),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])]),
"val": transforms.Compose([transforms.Resize(img_size[num_model][1]),
transforms.CenterCrop(img_size[num_model][1]),
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])])}
train_dataset = MyDataSet(train_images_path, train_images_label, transform=data_transform["train"])
val_dataset = MyDataSet(val_images_path, val_images_label, transform=data_transform["val"])
batch_size = args.batch_size
nw = min([os.cpu_count(), batch_size if batch_size > 1 else 0, 8])
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True, num_workers=nw)
val_loader = DataLoader(val_dataset, batch_size=batch_size, shuffle=False, num_workers=nw)
model = create_model(num_classes=args.num_classes).to(device)
if args.weights != "":
if os.path.exists(args.weights):
weights_dict = torch.load(args.weights, map_location=device)
load_weights_dict = {k: v for k, v in weights_dict.items()
if model.state_dict()[k].numel() == v.numel()}
print(model.load_state_dict(load_weights_dict, strict=False))
else:
raise FileNotFoundError
if args.freeze_layers:
for name, para in model.named_parameters():
if "head" not in name:
para.requires_grad_(False)
else:
print("train {}".format(name))
pg = [p for p in model.parameters() if p.requires_grad]
optimizer = optim.SGD(pg, lr=args.lr, momentum=0.9, weight_decay=1E-4)
lf = lambda x: ((1 + math.cos(x * math.pi / args.epochs)) / 2) * (1 - args.lrf) + args.lrf # cosine
scheduler = lr_scheduler.LambdaLR(optimizer, lr_lambda=lf)
for epoch in range(args.epochs):
train_loss, train_acc = train_one_epoch(model=model,
optimizer=optimizer,
data_loader=train_loader,
device=device,
epoch=epoch)
scheduler.step()
val_loss, val_acc = evaluate(model=model,
data_loader=val_loader,
device=device,
epoch=epoch)
tags = ["train_loss", "train_acc", "val_loss", "val_acc", "learning_rate"]
tb_writer.add_scalar(tags[0], train_loss, epoch)
tb_writer.add_scalar(tags[1], train_acc, epoch)
tb_writer.add_scalar(tags[2], val_loss, epoch)
tb_writer.add_scalar(tags[3], val_acc, epoch)
tb_writer.add_scalar(tags[4], optimizer.param_groups[0]["lr"], epoch)
torch.save(model.state_dict(), "./weights/model-{}.pth".format(epoch))
if __name__ == '__main__':
parser = argparse.ArgumentParser()
parser.add_argument('--num_classes', type=int, default=5)
parser.add_argument('--epochs', type=int, default=30)
parser.add_argument('--batch-size', type=int, default=8)
parser.add_argument('--lr', type=float, default=0.01)
parser.add_argument('--lrf', type=float, default=0.01)
# 数据集所在根目录
parser.add_argument('--data-path', type=str,
default="D:\Program Files\project\pythonProject1\study_Git\data_set\/flower_data\/flower_photos")
# download model weights
parser.add_argument('--weights', type=str, default='./pre_efficientnetv2-s.pth',
help='initial weights path')
parser.add_argument('--freeze-layers', type=bool, default=True)
parser.add_argument('--device', default='cuda:0', help='device id (i.e. 0 or 0,1 or cpu)')
opt = parser.parse_args()
main(opt)
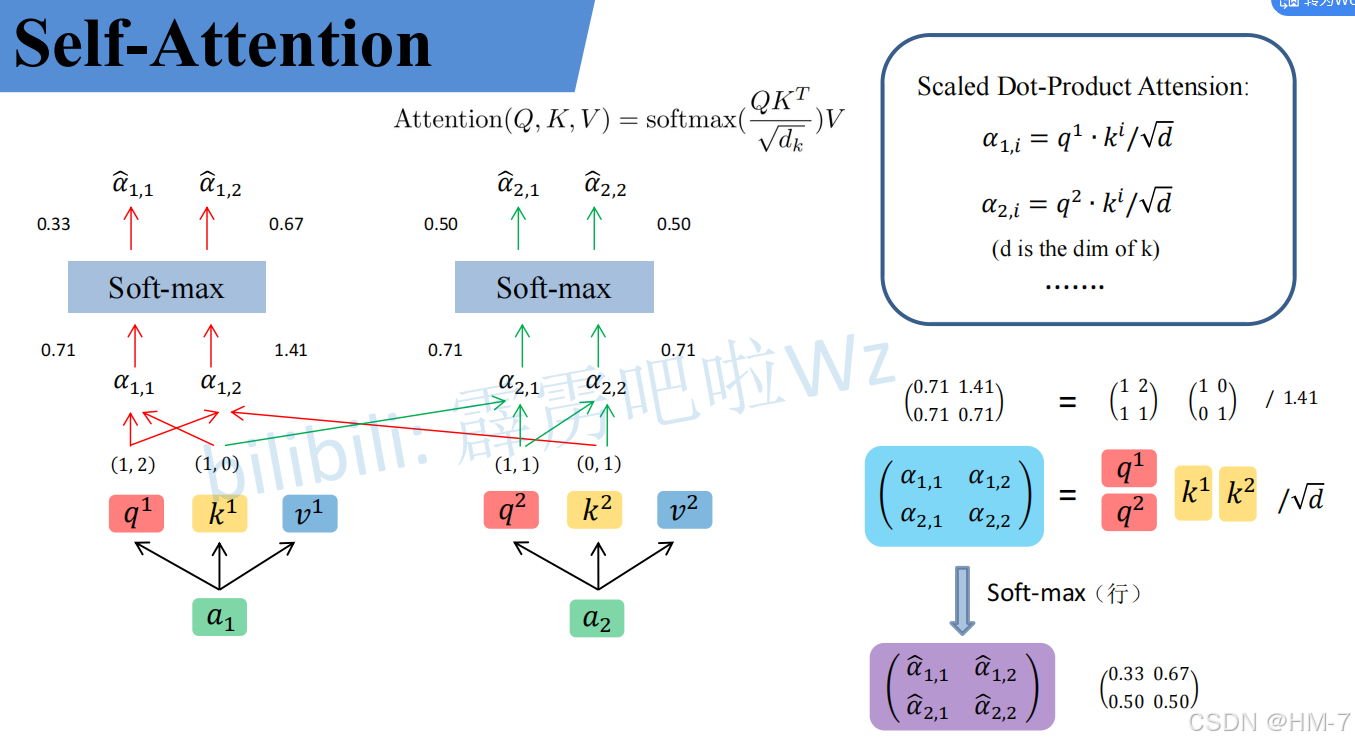
Self-Attention
自注意力机制是广泛用于深度学习的方法,其允许模型在处理输入数据时自动关注不同部分的相关性,从而提高特征提取和表示能力。
具体可分为以下几个步骤:
-
输入嵌入: 输入序列(如词嵌入)被表示为一个矩阵,矩阵的每一行对应一个输入元素(如一个单词的嵌入向量)。
-
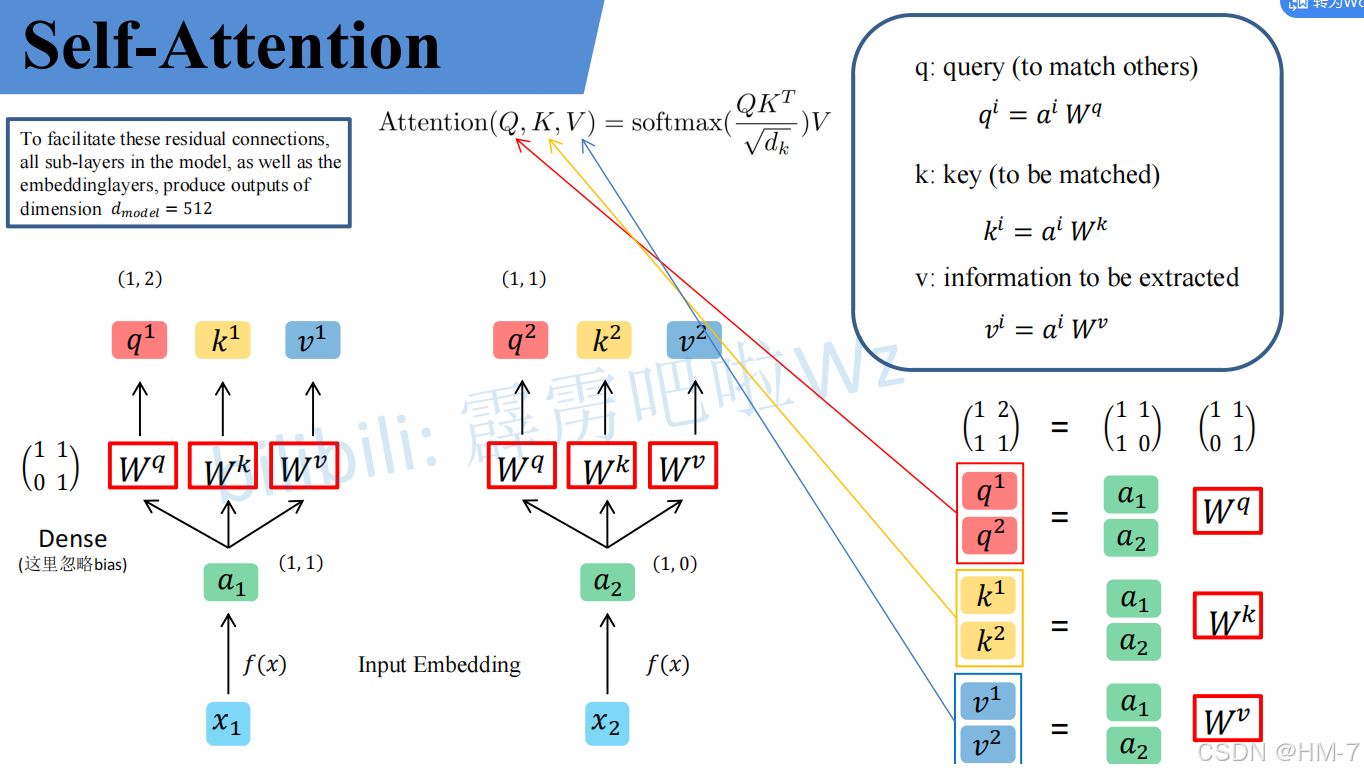
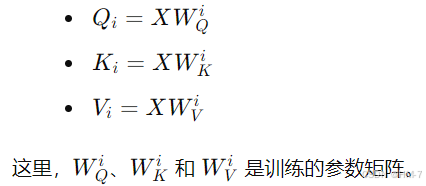
生成查询、键和值: 输入嵌入通过三个不同的线性变换生成查询(Query)、键(Key)和值(Value):
- 查询(Q):表示需要关注的部分。
- 键(K):表示可被关注的部分。
- 值(V):表示对应的输出信息。
-
计算注意力权重: 通过计算查询与键之间的点积,然后进行缩放和归一化,得到注意力权重:

-
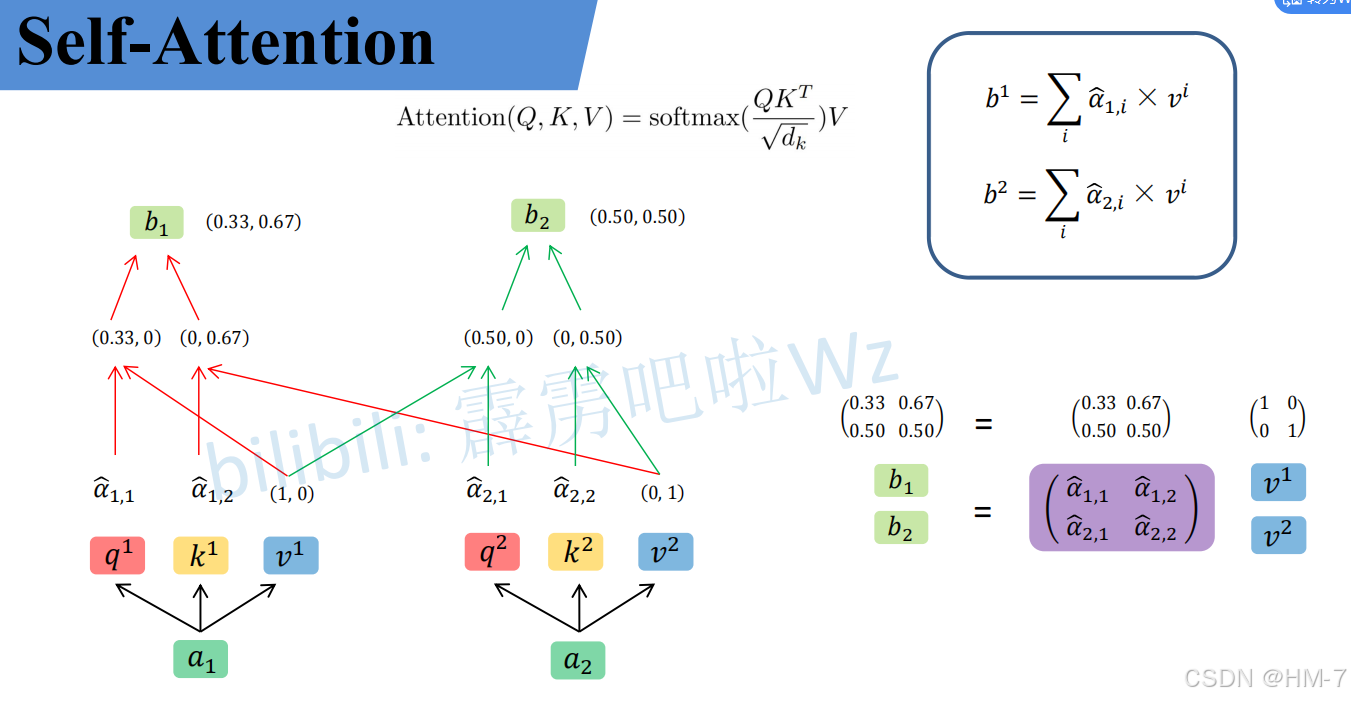
加权求和: 使用计算得到的注意力权重对值进行加权求和,得到输出表示。这个表示可以被理解为是对输入序列中不同元素的加权整合。
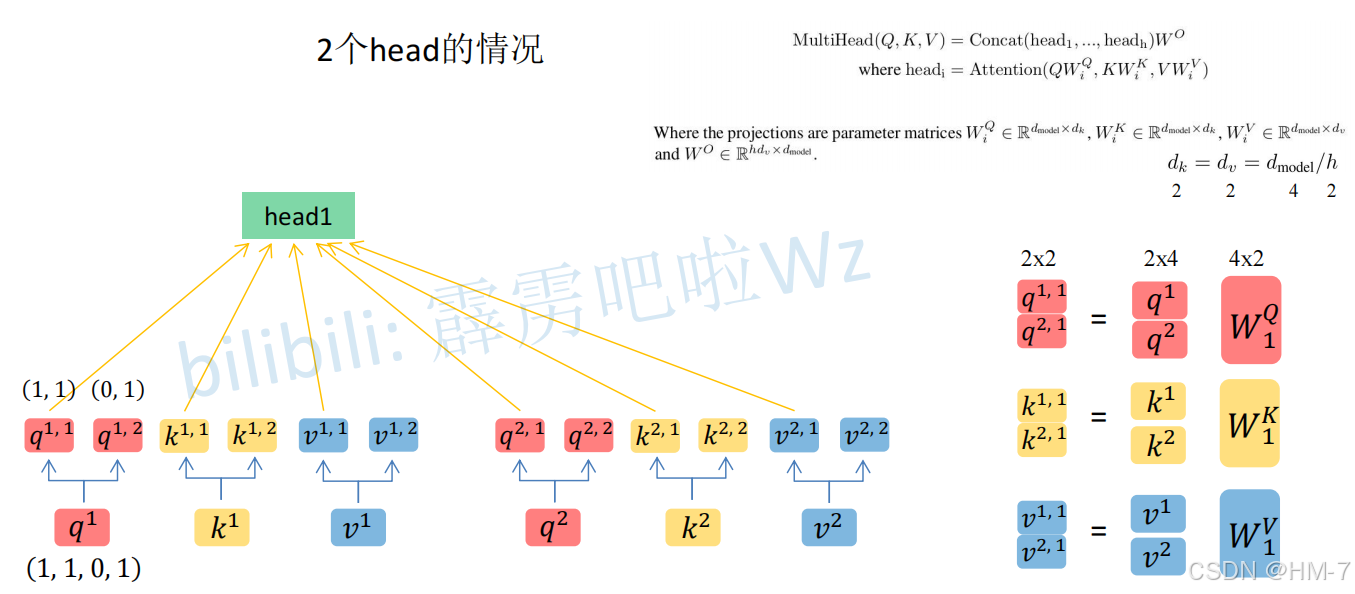
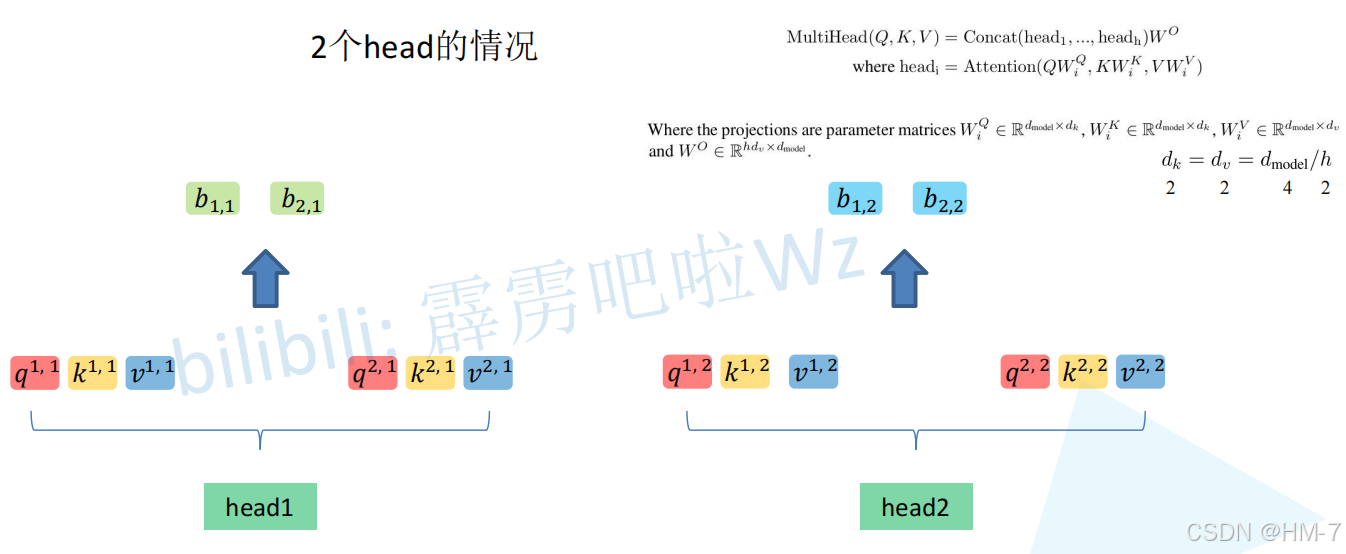
Multi-Head多头注意力
自注意力机制的一种扩展,广泛应用于 Transformer 模型中。它通过并行计算多个自注意力头,允许模型在不同的表示子空间中学习信息,从而增强了模型的表达能力。
(这里有点类似与分组卷积的思想)
工作步骤:
-
输入嵌入: 输入序列(如词嵌入)被表示为一个矩阵,通常是一个三维张量(batch_size, sequence_length, embedding_dim),其实batch_size就是所说的头。
-
线性变换: 对输入的查询、键和值进行线性变换,生成多个头的查询、键和值:
- 将输入的查询、键和值分别映射到多个不同的子空间中,通常每个子空间的维度为 dk(键的维度)。
- 对于每个头i有:
-
计算注意力: 在每个头上,利用注意力机制求注意力权重。

-
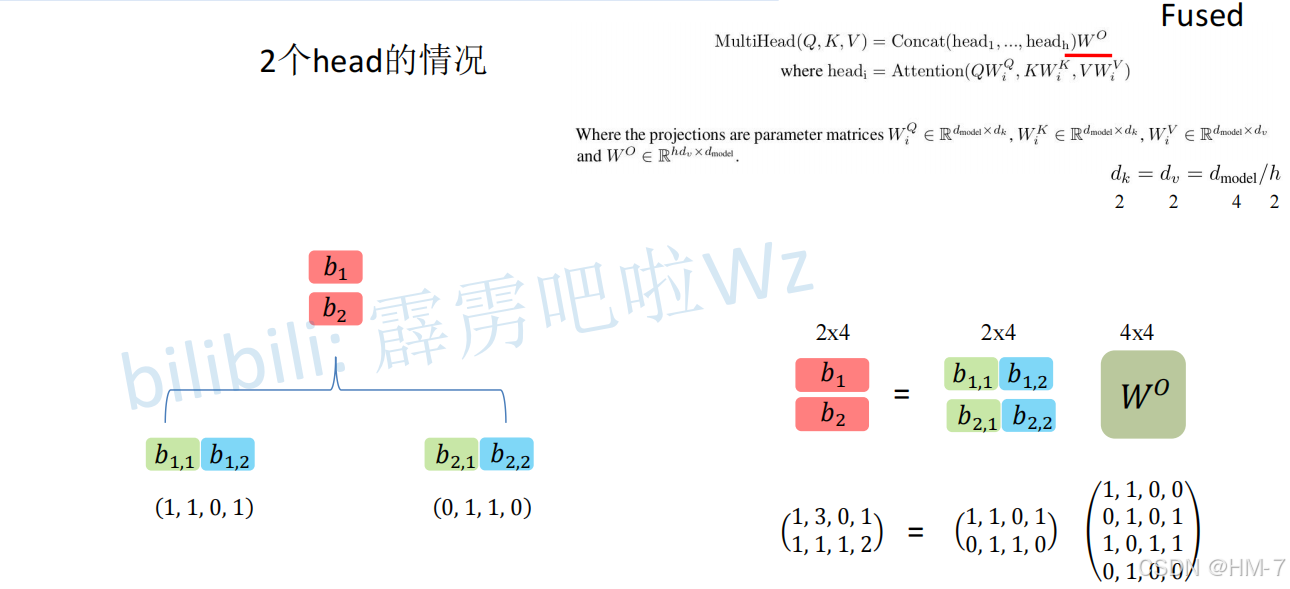
合并头的输出: 将所有头的输出拼接起来,并进行线性变换:

简单实现
自注意力
其实就是矩阵间的点乘和取softmax。
例子来源:https://blog.csdn.net/weixin_44791964/article/details/135423390?fromshare=blogdetail&sharetype=blogdetail&sharerId=135423390&sharerefer=PC&sharesource=qq_51098172&sharefrom=from_link
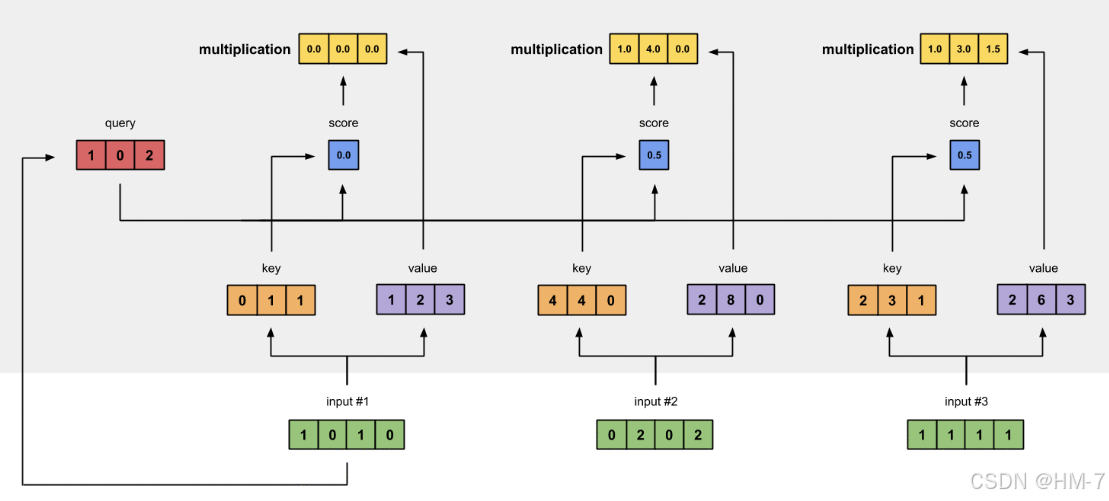
此时我们想求input1的输出:
- 首先利用input1的query去和input1、input2、input3的key相乘,求出的即为score。
- 对求出的三个score求softmax,分别获取到了input1、input2、input3的重要程度。
- 随后将softmax处理后的值与input1、input2、input3的value相乘,再求和。
- 上述步骤后的值即为input1的输出。
多头注意力
假设现在有个特征序列的shape为[3, 768],也就意味着序列长度为3,每一个单位序列的特征大小为768。
在施加多头的时候,我们直接对[3, 768]的最后一维度进行分割,比如我们想分割成12个头,那么矩阵的shepe就变成了[3, 12, 64]。
然后我们将[3, 12, 64]进行转置,将12放到前面去,获得的特征层为[12, 3, 64]。之后我们忽略这个12,把它和batch维度同等对待,只对3, 64进行处理,其实也就是上面的注意力机制的过程了。
import torch
value_len = 3
num_attention_heads = 12
hidden_size = 768
Query = torch.randn(value_len, hidden_size)
Value = torch.randn(value_len, hidden_size)
Key = torch.randn(value_len, hidden_size)
# 分割出头层
Query = torch.reshape(Query, (value_len, num_attention_heads, hidden_size // num_attention_heads))
Query = torch.transpose(Query, 0, 1)
Value = torch.reshape(Value, (value_len, num_attention_heads, hidden_size // num_attention_heads))
Value = torch.transpose(Value, 0, 1)
Key = torch.reshape(Key, (value_len, num_attention_heads, hidden_size // num_attention_heads))
Key = torch.transpose(Key, 0, 1)
# 求注意力权重
scores = Query @ torch.permute(Key, (0, 2, 1))
scores = torch.softmax(scores, dim=-1)
print(scores.shape)
out = scores @ Value
print(out.shape)
out = torch.permute(out, (1, 0, 2))
print(out.shape)
out = torch.reshape(out, (value_len, hidden_size))
print(out.shape)

















 1651
1651

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









