







目录
1.数据采集方式
数据采集有两种方式:
方式一:使用SDK中包含的Capture Demo:
- how to save raw data from the Capture Demo using Code Composer Studio(CCS) 在CCS中通过Capture Demo去采集rawdata
- The raw data format of data captured using the Capture Demo 分析使用Capture Demo采集的原始数据的格式
方式二:使用mmwave studio
- the raw data format of data captured using Mmwave Studio 使用Mmwave Studio采集的原始数据的格式
- how to interpret the data in MATLAB 在MATLAB中解释数据
2.分析数据格式
下面以AWR1843+DCA1000的组合为例,使用mmWave Studio进行数据采集并分析数据的格式【task1】。具体的操作流程可以参考文章使用DCA1000和EVM板进行数据采集。
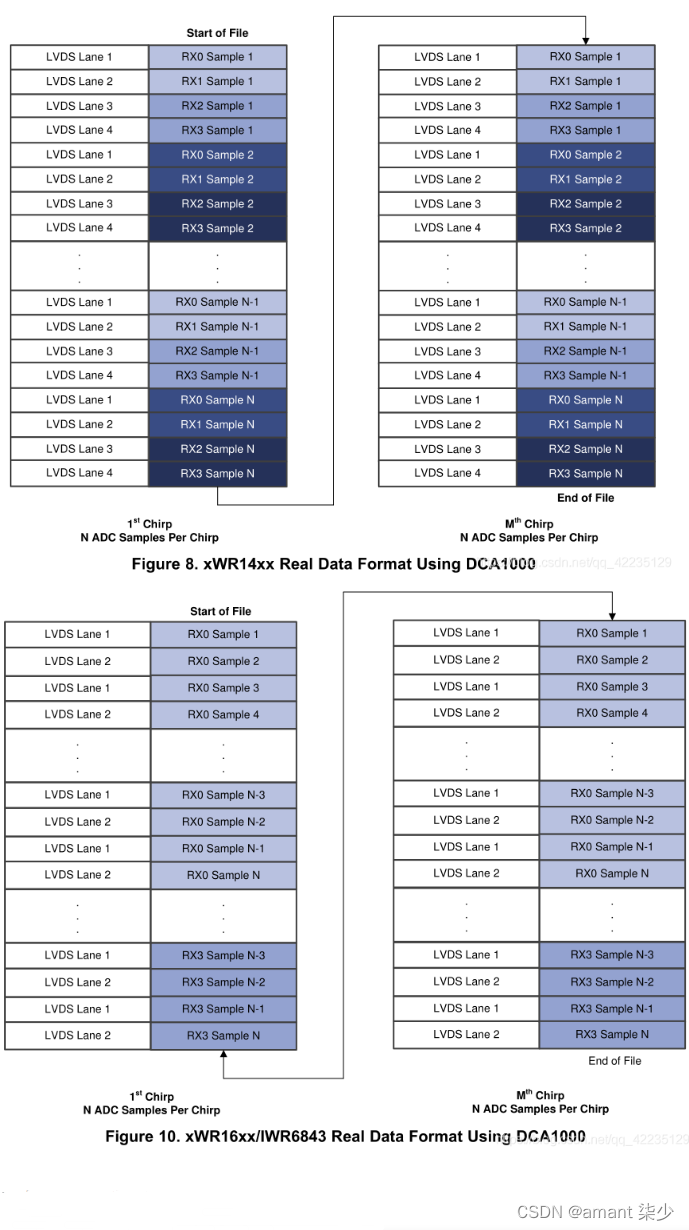
For xWR12xx and xWR14xx devices, data is captured over four LVDS lanes and is stored in a binary file in an interleaved format. For xWR16xx/IWR6843 devices, data is captured over two LVDS lanes and is stored in a binary file in non-inerleaved format。
interleaved format:每个LVDS对应存储一个天线的数据;
Non-interleaved format:使用不同的LVDS去存储同一个天线的数据,先紧着一个天线存。
数据以不同的形式存储,那么其对应的readDCA1000的内容肯定不一样。
以存储实数为例,对比两种方式。
3. 解读原始数据
解读原始数据并在MATLAB中进行分析【task2】
将采集到的数据【.bin文件】通过readDCA1000转换成【.mat文件】,readDCA1000就是通过分析上面数据的格式写的一个m文件。
这里以XWR12xx和XWR14xx为例,也就是interleaved format存储方式,看看readDCA1000里面的内容。重点是下面的这部分,isReal默认是0。
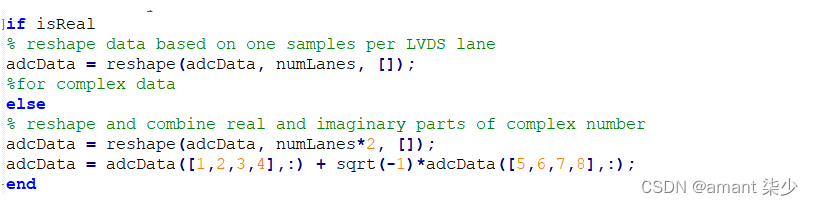
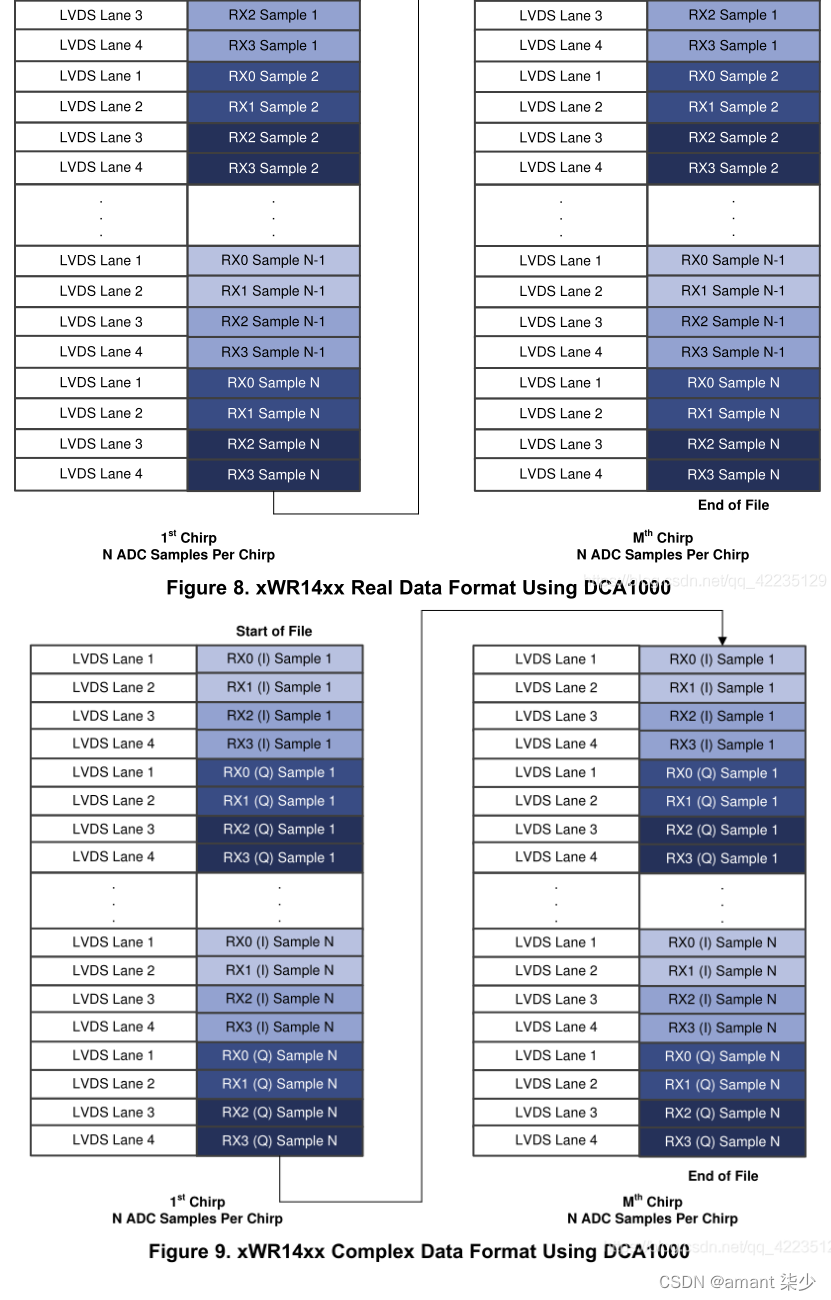
参考下面两张图来写的。对于复数数据,八行分别对应RX0-I,RX1-I,RX2-I,RX3-I ,RX0-Q,RX1-Q,RX2-Q,RX3-Q。
4.Bin文件格式
数据包有32个帧
一帧(frame)有128个chrip
一个chrip采256个点
一个采样点16bit
一个接收天线分为I/Q两路采集(看上上图)(两个十进制数组成一个复数,I+jQ),因此计算数据量大小要乘以2。
iwr1642有4个接收天线
一个接收天线1帧的数据大小(字节): E=128 * 256 * (16/8) * 2
4个接收天线32帧的数据大小(字节) : 32 * 4 * E=16,777,216 字节
总大小=TR * Tx * Frame * Chirp * Sample * (16/8)* 2


















 3314
3314

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











