







**
Open3D 分割案例:
**
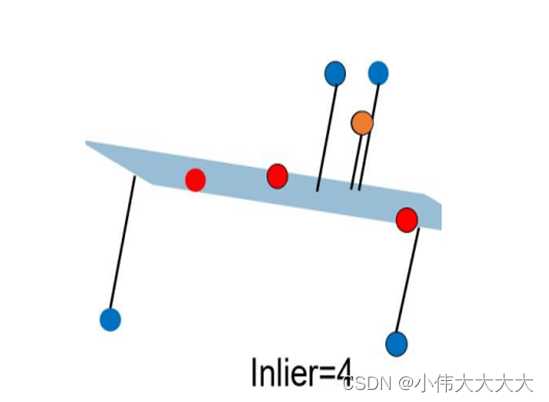
RANSAC 总结:(参数:最少点个数MinPts,半径 R)
1:确定拟合模型
2:确定拟合该模型每次需要的点个数
3:随机选点计算模型参数
4:根据距离d计算inlier个数
5:重复随机,保留inlier个数最多的那个模型
参数:距离d,随机次数n,拟合模型

利用前面所学知识,实践分割案例:
分割如下点云,实现步骤:
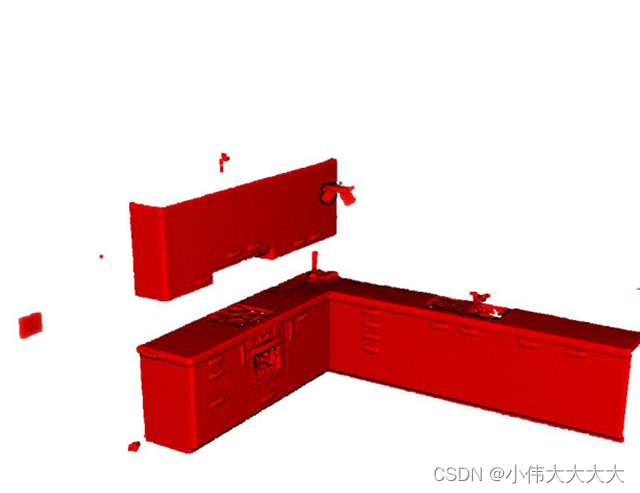
RANSAC:
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
# Open3D 0.16版本的 api
pcd = o3d.io.read_point_cloud("sample.ply")
# 计算法线
pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=16), fast_normal_computation=True)
pcd.paint_uniform_color([0,0,1])
# #RANSAC
[a, b, c, d], inliers = pcd.segment_plane(distance_threshold=0.01,ransac_n=3,num_iterations=1000)
print(f"平面方程: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
inlier_cloud = pcd.select_by_index(inliers)
outlier_cloud = pcd.select_by_index(inliers, invert=True)
inlier_cloud.paint_uniform_color([1.0, 0, 0])
outlier_cloud.paint_uniform_color([0.6, 0.6, 0.6])
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
DBSCAN:
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
# Open3D 0.16版本的 api
pcd = o3d.io.read_point_cloud("sample.ply")
# 计算法线
pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=16), fast_normal_computation=True)
pcd.paint_uniform_color([0,0,1])
# # DBSCAN
labels = np.array(pcd.cluster_dbscan(eps=0.05, min_points=10))
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters")
# 给不同类别赋予不同的颜色
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd])
segment_models={}
segments={}
max_plane_idx=40
rest=pcd
d_threshold=0.01
for i in range(max_plane_idx):
colors = plt.get_cmap("tab20")(i)
segment_models[i], inliers = rest.segment_plane(distance_threshold=0.01,ransac_n=3,num_iterations=1000)
segments[i]=rest.select_by_index(inliers)
labels = np.array(segments[i].cluster_dbscan(eps=d_threshold*10, min_points=10))
candidates=[len(np.where(labels==j)[0]) for j in np.unique(labels)]
best_candidate=int(np.unique(labels)[np.where(candidates==np.max(candidates))[0]])
print("the best candidate is: ", best_candidate)
rest = rest.select_by_index(inliers, invert=True)+segments[i].select_by_index(list(np.where(labels!=best_candidate)[0]))
segments[i]=segments[i].select_by_index(list(np.where(labels==best_candidate)[0]))
segments[i].paint_uniform_color(list(colors[:3]))
print("pass",i+1,"/",max_plane_idx,"done.")
labels = np.array(rest.cluster_dbscan(eps=0.05, min_points=5))
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters")
colors = plt.get_cmap("tab10")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
rest.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([segments[i] for i in range(max_plane_idx)]+[rest])
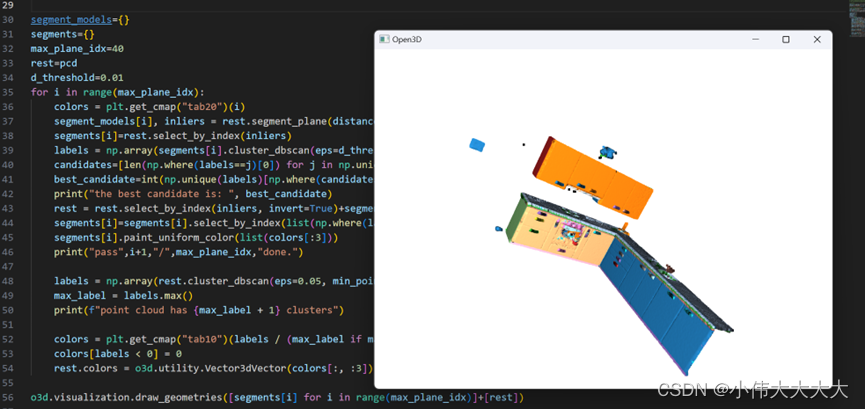
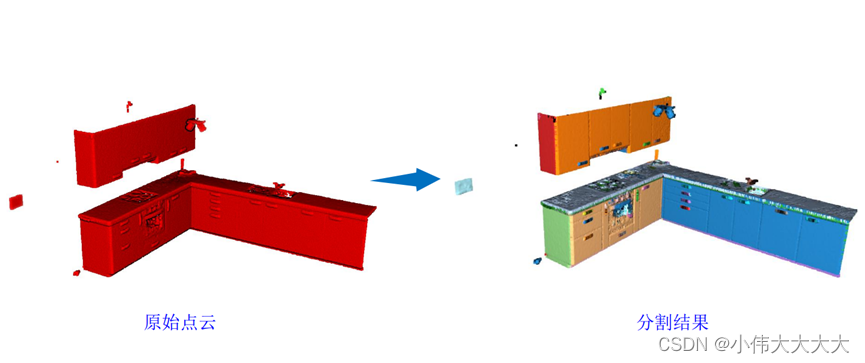
运行效果如下:
代码难点解读,请看我下一篇文章,链接:
代码解析链接https://blog.csdn.net/qq_52040083/article/details/134435780?spm=1001.2014.3001.5502















 1076
1076











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









