






Open3D 分割案例:
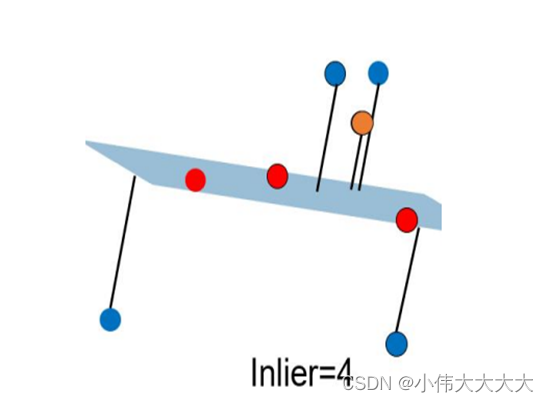
RANSAC(Random sample consensus)算法原理:
随机抽样一致性算法RANSAC(Random sample consensus)是一种迭代的方法来从一系列包含有离异值的数据中计算数学模型参数的方法。
RANSAC算法本质上由两步组成,不断进行循环:
从输入数据中随机选出能组成数学模型的最小数目的元素,使用这些元素计算出相应模型的参数。选出的这些元素数目是能决定模型参数的最少的。
检查所有数据中有哪些元素能符合第一步得到的模型。超过错误阈值的元素认为是离群值(outlier),小于错误阈值的元素认为是内部点(inlier)。
这个过程重复多次,选出包含点最多的模型即得到最后的结果。
RANSAC具体到空间点云中拟合平面:
1、从点云中随机选取三个点。
2、由这三个点组成一个平面。
3、计算所有其他点到该平面的距离,如果小于阈值T,就认为是处在同一个平面的点。
3、如果处在同一个平面的点超过n个,就保存下这个平面,并将处在这个平面上的点都标记为已匹配。
4、终止的条件是迭代N次后找到的平面小于n个点,或者找不到三个未标记的点。
RANSAC 总结:(参数:最少点个数MinPts,半径 R)
1:确定拟合模型
2:确定拟合该模型每次需要的点个数
3:随机选点计算模型参数
4:根据距离d计算inlier个数
5:重复随机,保留inlier个数最多的那个模型
参数:距离d,随机次数n,拟合模型

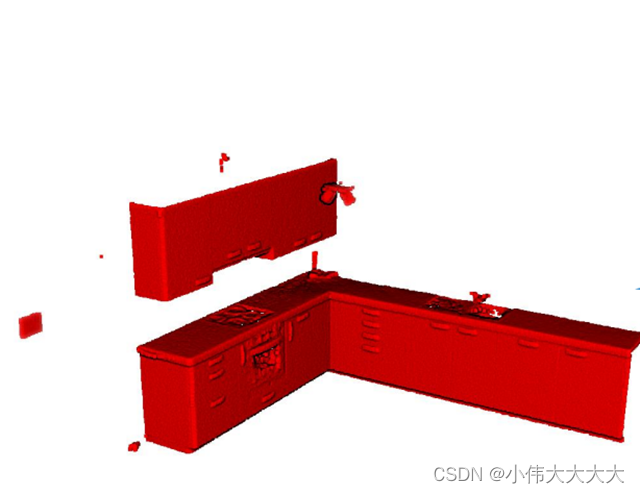
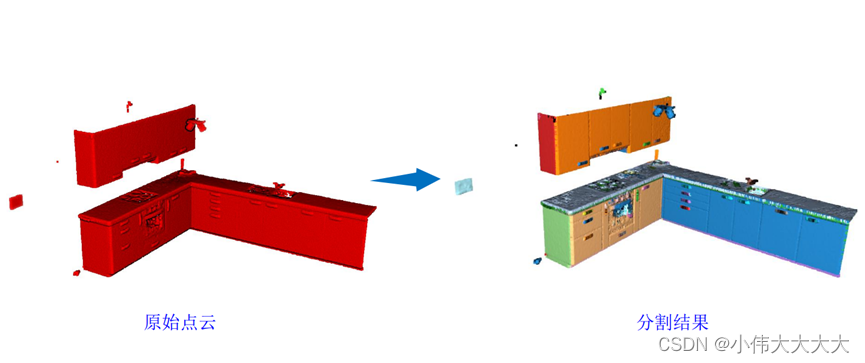
利用前面所学知识,实践分割案例:
分割如下点云,实现步骤:
1.使用 RANSAC 循环分割平面
2.使用 DBSCAN 对不规则的物体进行聚类
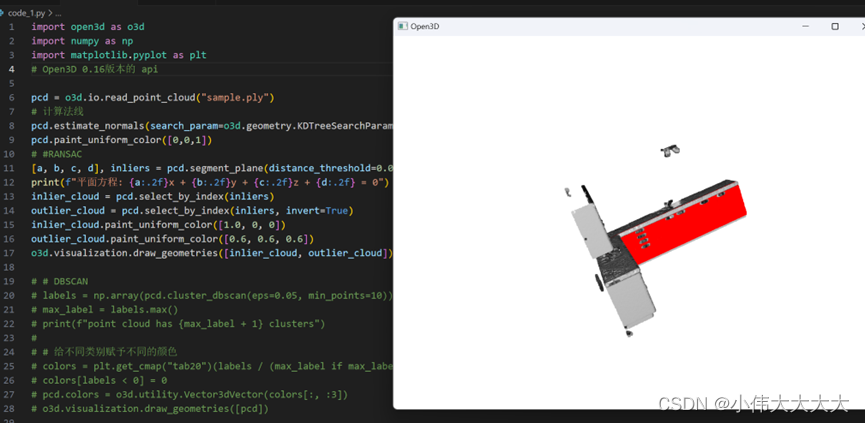
RANSAC:
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
# Open3D 0.16版本的 api
pcd = o3d.io.read_point_cloud("sample.ply")
# 计算法线
pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=16), fast_normal_computation=True)
pcd.paint_uniform_color([0,0,1])
# #RANSAC
[a, b, c, d], inliers = pcd.segment_plane(distance_threshold=0.01,ransac_n=3,num_iterations=1000)
print(f"平面方程: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
inlier_cloud = pcd.select_by_index(inliers)
outlier_cloud = pcd.select_by_index(inliers, invert=True)
inlier_cloud.paint_uniform_color([1.0, 0, 0])
outlier_cloud.paint_uniform_color([0.6, 0.6, 0.6])
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
DBSCAN:
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
# Open3D 0.16版本的 api
pcd = o3d.io.read_point_cloud("sample.ply")
# 计算法线
pcd.estimate_normals(search_param=o3d.geometry.KDTreeSearchParamHybrid(radius=0.1, max_nn=16), fast_normal_computation=True)
pcd.paint_uniform_color([0,0,1])
# # DBSCAN
labels = np.array(pcd.cluster_dbscan(eps=0.05, min_points=10))
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters")
# 给不同类别赋予不同的颜色
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd])
segment_models={}
segments={}
max_plane_idx=40
rest=pcd
d_threshold=0.01
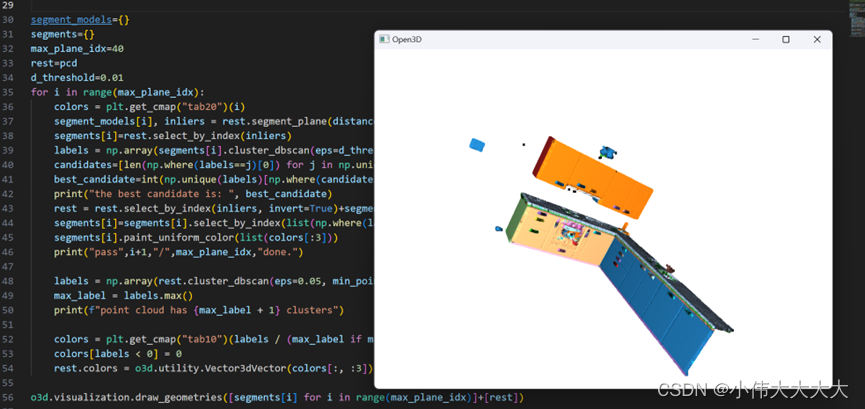
for i in range(max_plane_idx):
colors = plt.get_cmap("tab20")(i)
segment_models[i], inliers = rest.segment_plane(distance_threshold=0.01,ransac_n=3,num_iterations=1000)
segments[i]=rest.select_by_index(inliers)
labels = np.array(segments[i].cluster_dbscan(eps=d_threshold*10, min_points=10))
candidates=[len(np.where(labels==j)[0]) for j in np.unique(labels)]
best_candidate=int(np.unique(labels)[np.where(candidates==np.max(candidates))[0]])
print("the best candidate is: ", best_candidate)
rest = rest.select_by_index(inliers, invert=True)+segments[i].select_by_index(list(np.where(labels!=best_candidate)[0]))
segments[i]=segments[i].select_by_index(list(np.where(labels==best_candidate)[0]))
segments[i].paint_uniform_color(list(colors[:3]))
print("pass",i+1,"/",max_plane_idx,"done.")
labels = np.array(rest.cluster_dbscan(eps=0.05, min_points=5))
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters")
colors = plt.get_cmap("tab10")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0
rest.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([segments[i] for i in range(max_plane_idx)]+[rest])
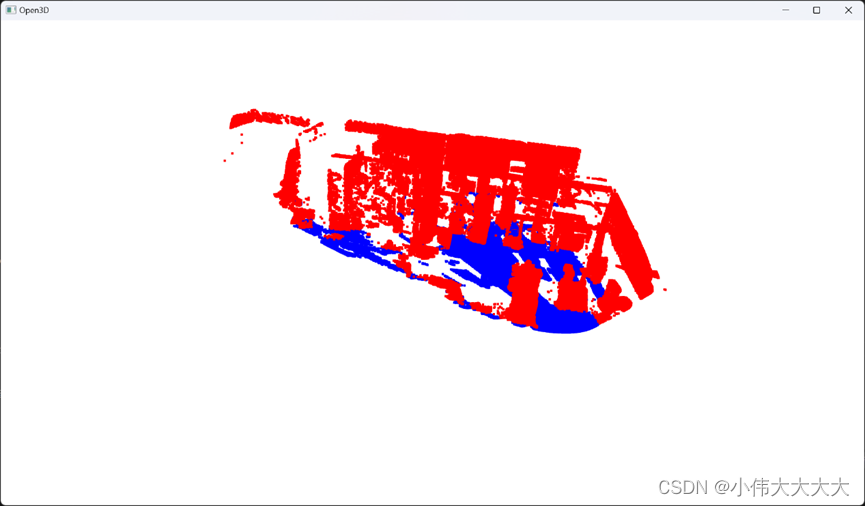
运行效果如下:
PCL Ransac拟合平面
代码演示:
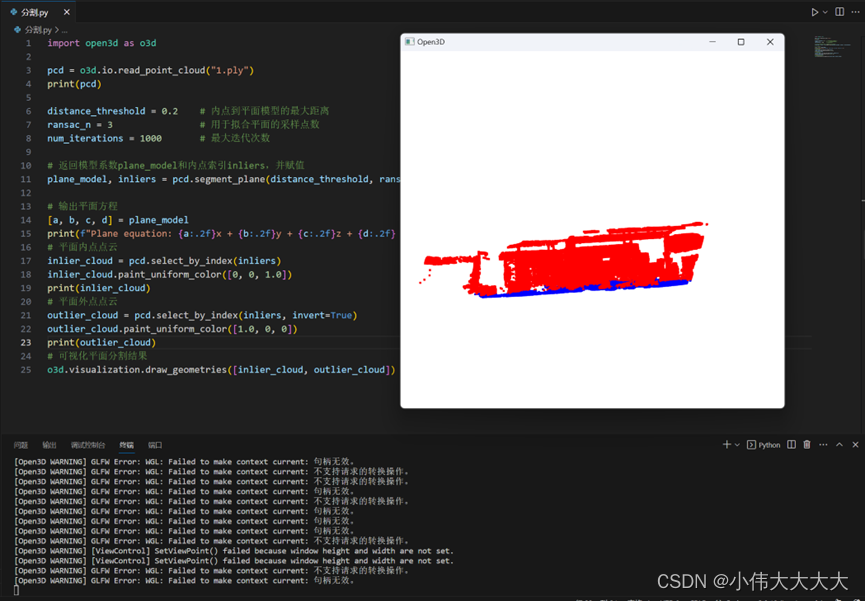
import open3d as o3d
pcd = o3d.io.read_point_cloud("1.ply")
print(pcd)
distance_threshold = 0.2 # 内点到平面模型的最大距离
ransac_n = 3 # 用于拟合平面的采样点数
num_iterations = 1000 # 最大迭代次数
# 返回模型系数plane_model和内点索引inliers,并赋值
plane_model, inliers = pcd.segment_plane(distance_threshold, ransac_n, num_iterations)
# 输出平面方程
[a, b, c, d] = plane_model
print(f"Plane equation: {a:.2f}x + {b:.2f}y + {c:.2f}z + {d:.2f} = 0")
# 平面内点点云
inlier_cloud = pcd.select_by_index(inliers)
inlier_cloud.paint_uniform_color([0, 0, 1.0])
print(inlier_cloud)
# 平面外点点云
outlier_cloud = pcd.select_by_index(inliers, invert=True)
outlier_cloud.paint_uniform_color([1.0, 0, 0])
print(outlier_cloud)
# 可视化平面分割结果
o3d.visualization.draw_geometries([inlier_cloud, outlier_cloud])
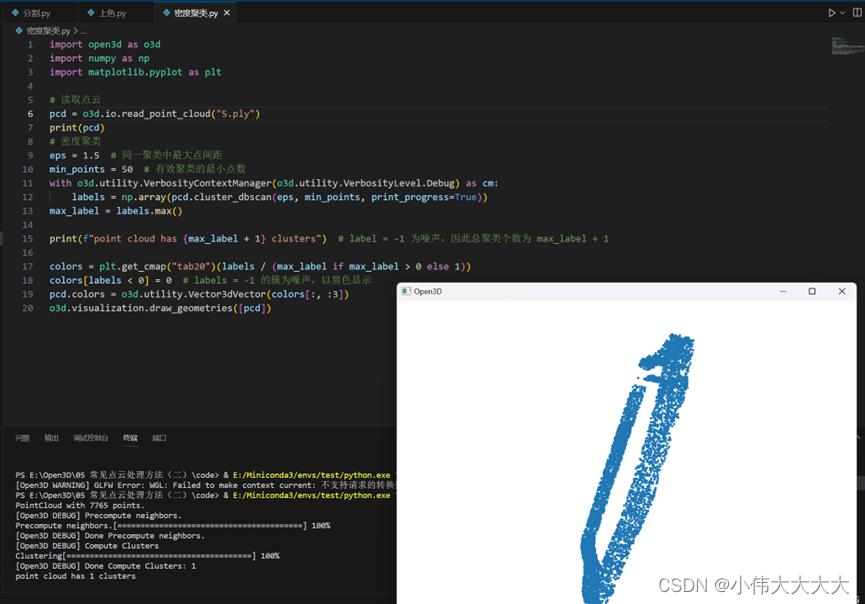
密度聚类:
Open3D中的cluster_dbscan实现密度聚类。需要两个参数:
1.eps为同一簇内的最大点间距,
2.min_points定义有效聚类的最小点数。
函数返回标签label,其中label = -1表示噪声
import open3d as o3d
import numpy as np
import matplotlib.pyplot as plt
# 读取点云s
pcd = o3d.io.read_point_cloud("4.ply")
print(pcd)
# 密度聚类
eps = 1.5 # 同一聚类中最大点间距
min_points = 50 # 有效聚类的最小点数
with o3d.utility.VerbosityContextManager(o3d.utility.VerbosityLevel.Debug) as cm:
labels = np.array(pcd.cluster_dbscan(eps, min_points, print_progress=True))
max_label = labels.max()
print(f"point cloud has {max_label + 1} clusters") # label = -1 为噪声,因此总聚类个数为 max_label + 1
colors = plt.get_cmap("tab20")(labels / (max_label if max_label > 0 else 1))
colors[labels < 0] = 0 # labels = -1 的簇为噪声,以黑色显示
pcd.colors = o3d.utility.Vector3dVector(colors[:, :3])
o3d.visualization.draw_geometries([pcd])
代码难点解读,请看我下一篇文章,链接:
代码解析链接https://blog.csdn.net/qq_52040083/article/details/134435780?spm=1001.2014.3001.5502
代码函数语法难点:
np.max 与 np.maximum
>> np.max([-2, -1, 0, 1, 2])
2
>> np.maximum([-2, -1, 0, 1, 2], 0)
array([0, 0, 0, 1, 2])
当然 np.maximum 接受的两个参数,也可以大小一致
或者更为准确地说,第二个参数只是一个单独的值时,其实是用到了维度的 broadcast 机制;
# 当然 np.maximum 接受的两个参数,也可以大小一致
# 或者更为准确地说,第二个参数只是一个单独的值时,其实是用到了维度的 broadcast 机制;
Broadcast机制(还不够了解,CSDN链接解析)
大神总结https://blog.csdn.net/qq_38683460/article/details/126331052
np.unique( )的用法
该函数是去除数组中的重复数字,并进行排序之后输出。
拓展:
np.array(png),这个函数处理图片之后得到的结果是什么?
可以得到图像中存在的灰度值(或者像素值),然后分别统计图片里这些灰度值出现的个数,就可以得到灰度分布直方图了
numpy.where() 有两种用法:
网址链接:
大神链接https://www.cnblogs.com/massquantity/p/8908859.html
numpy网址https://numpy.org/doc/stable/reference/generated/numpy.where.html
np.where(condition, x, y)
满足条件(condition),输出x,不满足输出y。
np.where(condition)
只有条件 (condition),没有x和y,则输出满足条件 (即非0) 元素的坐标 (等价于numpy.nonzero)。这里的坐标以tuple的形式给出,通常原数组有多少维,输出的tuple中就包含几个数组,分别对应符合条件元素的各维坐标。
列表生成式:
链接:
大神链接https://www.liaoxuefeng.com/wiki/1016959663602400/1017317609699776
即List Comprehensions,是Python内置的非常简单却强大的可以用来创建list的生成式。
举个例子,要生成list [1, 2, 3, 4, 5, 6, 7, 8, 9, 10]
可以用list(range(1, 11)):















 1966
1966











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









