







【本文仅供个人整理资料学习所用,侵权必删!】
一、机器视觉常用参数
靶面大小:相机成像芯片实际物理尺寸
像素点(单元):图像中最小的单元,像素点是正方形。
分辨率:相机拍摄图像所包含的像素点数。
像素点大小:靶面尺寸/分辨率。
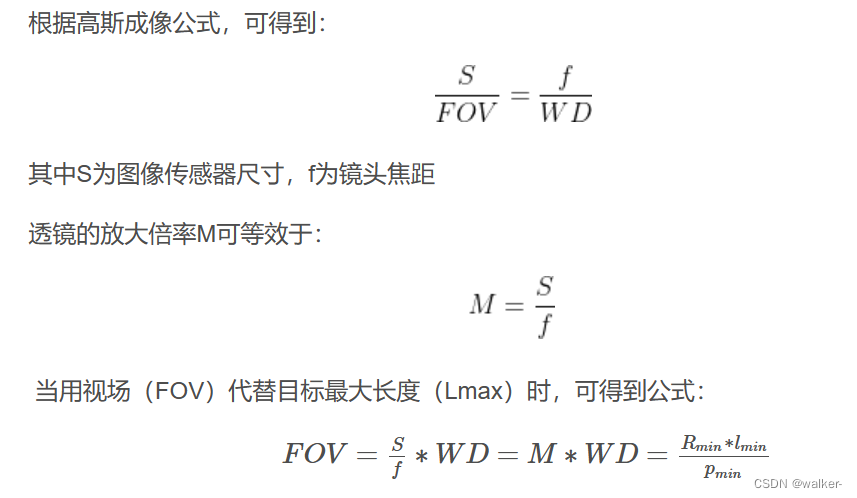
工作距离WD:镜头焦点到拍摄物体表面的物理尺寸。
焦距f:相机芯片表面到镜头焦点的距离。
(焦距/芯片尺寸=工作距离/视野尺寸)
图像分辨率:图像分辨率指图像中存储的信息量,是每英寸图像内有多少个像素点,分辨率的单位为PPI(Pixels Per Inch),通常叫做像素每英寸。图像分辨率一般被用于PS中,用来改变图像的清晰度。
系统分辨率:系统分辨率指成像系统可以识别出监测目标的最小细节或最小特征。诸如“要求系统能检测0.1mm的目标"、"要求系统测量精度达到0.01mm"之类的要求一般都和系统分辨率相关。
像素分辨率:像素分辨率指为了表示检测目标所需要的像素数。一般情况下,可以根据客户对检测目标中最小特征的要求来确定最小像素分辨率。如果将整个图像看作周期为最小特征大小的周期信号,则根据奈奎斯特采样定律,必须对信号每个周期采样2个点以上,才能完整恢复该信号。因此如果客户没有特别要求,常用至少两个像素来代表检测目标中的最小特征,这可被看作是图像传感器的奈奎斯特定律。
图像传感器应具备的最小像素分辨率常通过下面的公式计算:
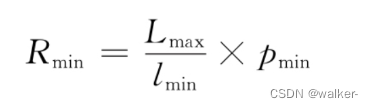
Rmin为最小像素分辨率。
Lmax为检测目标的最大长度。
lmin为检测目标的最小特征长度(视觉系统的分辨率)。
pmin为表示最小特征的像素数。
在无特别要求时,pmin=2,如果客户要求使用多于2像素来表示最小特征,则最小分辨率将适当增加。
视野大小(FOV):相机拍摄图像的实际物理尺寸。
视场(Field of View,FOV)指成像系统中图像传感器可以监测到的最大区域。在机器视觉系统设计时,考虑到一般都会使被检测目标尽量填满整视场,因此常用视场大小代替目标的最大长度Lmax来计算视觉系统的像素分辨率。如下图(a)所示,表示被检测目标在水平方向上占据整个视场,而图(b)表示目标未填满视场。
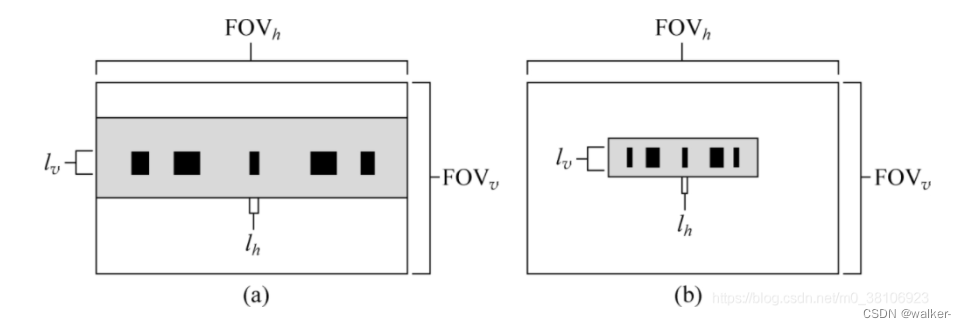
如果横纵方向上视场大小为[FOVh,FOVv],检测目标的最小特征的大小为[Ih,lv],则图像传感器应具有的最小像素分辨率为:
![]()
二、影响成像质量的因素
数字图像是对成像系统输出的信号进行数字化后的结果,成像系统反映真实场景的性能和质量直接决定整个机器视觉系统的性能。
影响机器视觉成像系统成像质量的因素主要包括:光源(Illumination)、系统分辨率(System Resolution)、像素分辨率(Pixel Resolution)、对比度(Contrast)、景深(Depth of Field,DOF)、投影误差(Perspective Error)和镜头畸变(Lens Distortion)。
而这些因素(参数)却直接或间接地由硬件选型和安装方式决定。
三、成像系统模型
工业或研究领域的成像系统多种多样,常见的有工业CCD/CMOS相机、工业显微镜、生物显微镜、X射线成像仪、红外成像仪、热成像仪等。无论这些成像系统的原理有多复杂,都可被抽象为下图所示的简化模型。

千差万别的成像系统对现实世界中的可见光、红外、X射线、热量等实施某种转换T (x,y),将物理量转换为电信号,再经图像采集设备采样、量化后生成数字图像。
1、可见光成像原理
可见光成像原理是利用物体反射或透过的可见光来形成图像的过程。当可见光照射到物体表面时,部分光被物体吸收,部分光被反射。这些反射光进入成像系统,经过透镜或反射镜的聚焦作用,最终形成物体的像。
成像原理可以用透镜成像为例来说明。根据透镜成像的规律,物体到透镜的距离与物体到像的距离之比等于透镜焦距与物体到透镜的距离之比。这个关系由透镜成像公式表示为:
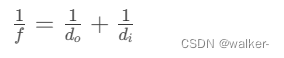
其中,f为透镜焦距,d0为物体到透镜的距离,di为物体到像的距离。
2、激光成像
激光成像原理是利用激光束照射目标物体,通过接收和处理反射或散射的激光信号来获取目标物体的图像信息。激光成像原理涉及到激光的发射、传播、与目标物体的相互作用以及信号的接收和处理等过程。
在激光成像中,激光器产生单色、相干、方向性好的激光束,经过透镜等光学元件聚焦后照射到目标物体上。目标物体对激光束的反射或散射会产生回波信号,接收器接收并记录这些信号。通过信号的处理和分析,可以重建出目标物体的图像。
3、红外成像
四、小孔成像与透镜成像
作者:eureka
链接:https://www.zhihu.com/question/299247177/answer/2815832054
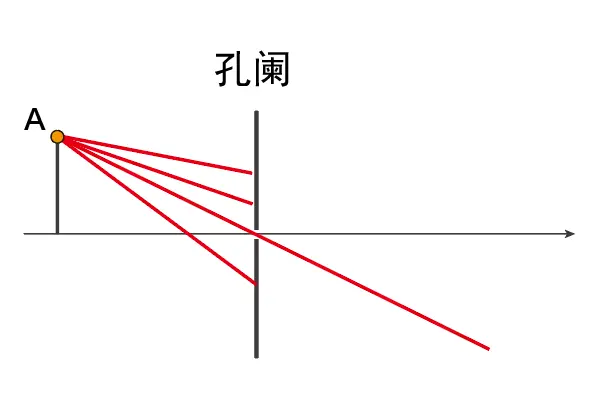
让我们先从基本的几何光学出发,假设有一个物体,其上有一点A,通过点A的光线向各个方向发散,而只有通过孔阑中心的部分才能够继续向前传输。当孔足够小时,我们认为只有“一条线”可以通过(当然,一条线这个说法并不准确)。
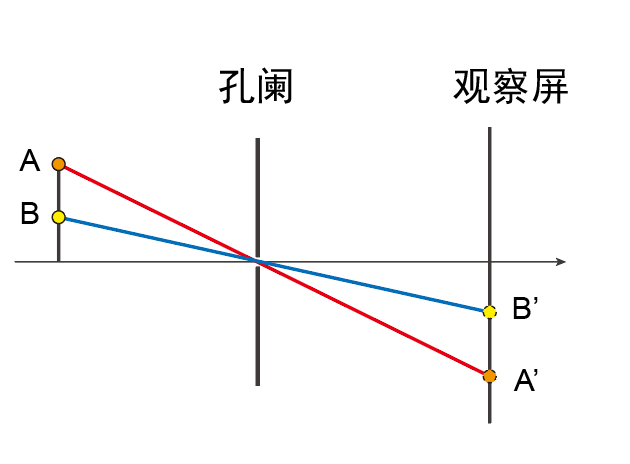
此时我们在孔阑右侧放一个观察屏,那么物体上A点和B点也都只有”一条光线“可以通过小孔,且这两个点出射的光线处于观察屏的不同空间位置A'和B'处,此时我们就看到了小孔成像现象,这也说明了光是沿直线传播的。
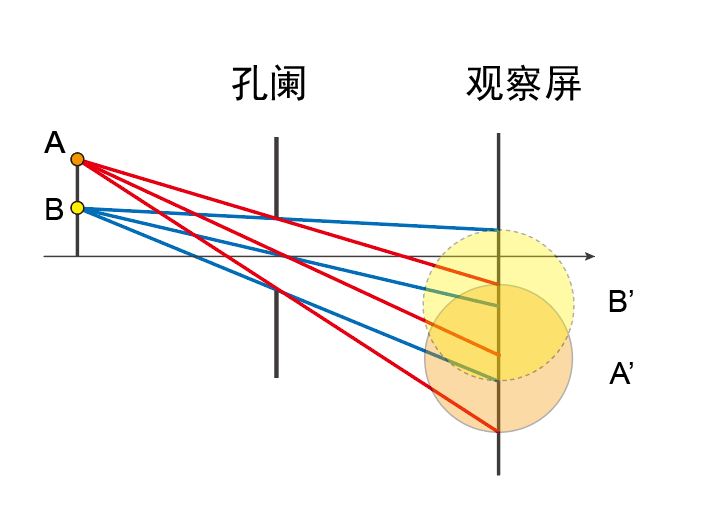
那么实际相机成像中,这个孔要大得多。对于焦距为50 mm,光圈F2的透镜来说,限制光束的孔的半径为12.5 mm,这个孔我大概估计了一下应该有下图中所示这么大。此时,我们看到,由于孔直径的变大,每个点通过孔的光线不再是一条,而是一束较宽的发散光。点A和点B发出的光在观察屏上交叠在一起,我们无法区分哪部分是A发出的,哪部分是B发出的,此时无法进行成像。
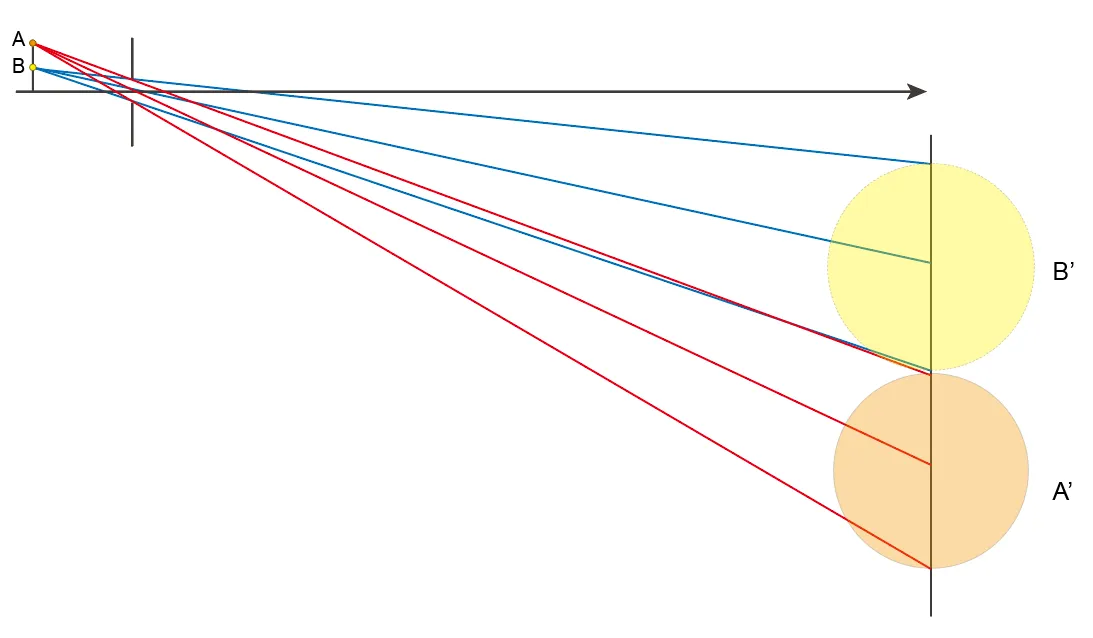
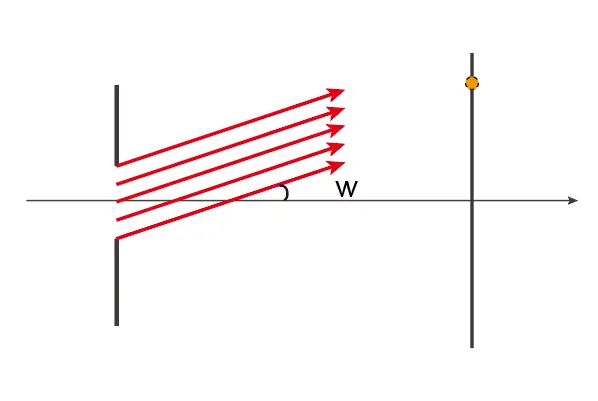
但是,如果我们把观察屏向右移动,会发生什么呢?如下图所示,A和B发出的光线在远处逐渐趋近于平行光,且两个点发出的光在空间上又分开了,我们可以清晰的看到A和B的像A'和B'。另外我们也观察到,此时像的尺寸变大了很多。
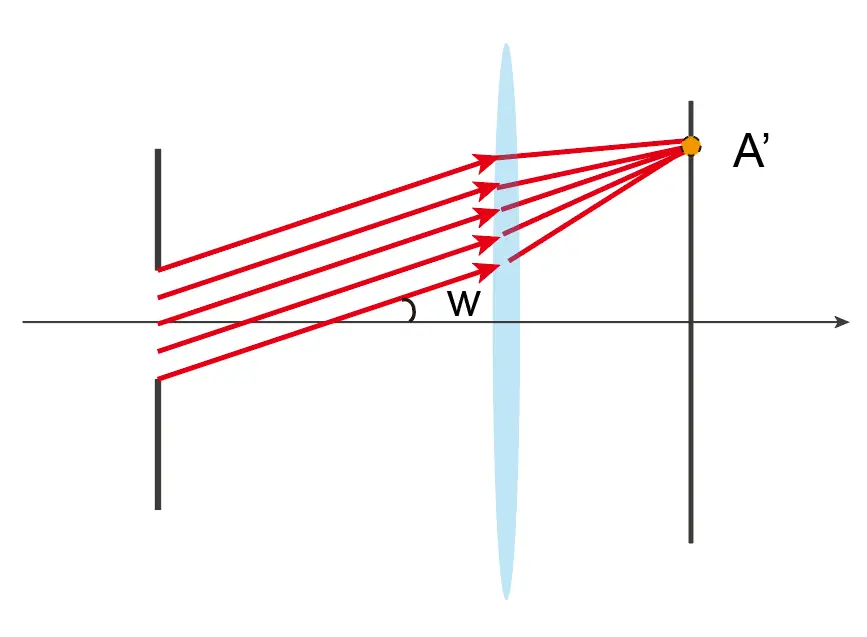
既然只要距离足够远,A'和B'总能分开,那么如果我们在孔阑后面加一个凸透镜,让光线提前汇聚一下会发生什么现象呢?按照这个思路,如下图所示,在孔阑后加入凸透镜之后,我们发现A和B在离孔阑不远处就成像了,且由于凸透镜的作用,此时像的尺寸要小于不加凸透镜的时候。
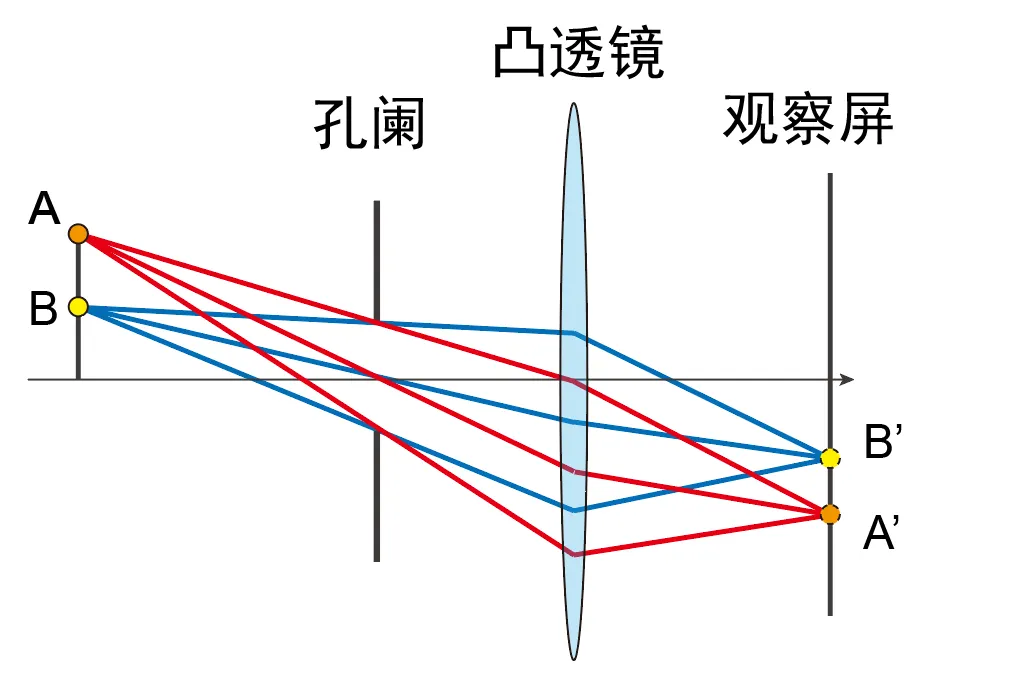
实际上,在上图中,我们已经再现了了相机的基本成像过程,其中,凸透镜代表镜头,而孔阑又被叫做孔径光阑,就是我们常说的光圈,观察屏就是传感器。因此我们可以下结论,小孔成像与凸透镜成像其实是在描述同样一个过程,只是凸透镜成像中有了透镜的参与,将大孔径下的像进行了“提前”成像,也正是因为有了凸透镜改变了原本的光线路径,因此相机成像过程就偏离了传统的小孔成像,在计算成像关系时需要将凸透镜的焦距等因素考虑进去。
上面我们只是通过几何光学的方式定性的做了分析,为了不让我们的解释显得过于单调,我们从数学上来进行一下简单的推导。其实关于小孔成像和凸透镜成像,在波动光学中已经有了很好的定量描述。此时,光就不再是沿直线传播了,我们需要考虑衍射因素,而小孔成像和凸透镜成像都属于夫琅禾费衍射的范畴。如果解释的更加数学一点,我们分别写出小孔的夫琅禾费衍射和小孔加入透镜后夫琅禾费衍射公式中的积分部分:
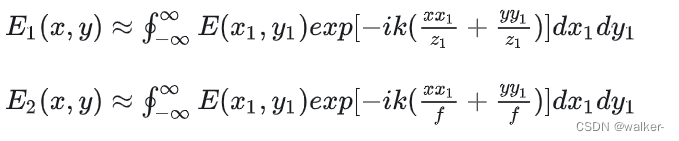
其中, E1为不加透镜时衍射场中电场的复振幅分布,E2为加入透镜后衍射场中电场的复振幅分布,这里我都省略了二者积分号外面的项。我们发现,两个积分中原本指数部分分母中的传播距离 z1被替换成了 f ,其他部分完全一样。不管是否加入凸透镜,二者都描述的是夫琅禾费衍射过程,成像中说的像都是指的远场的夫琅禾费衍射图案,而凸透镜则将点物通过小孔后原本处于远距离处的夫琅禾费衍射图案投射到凸透镜的像面上,到这里我们从数学上将小孔成像和凸透镜成像等效了起来。
在夫琅禾费衍射的观察中,要求观察点距离小孔足够远。但是这个远是个相对值,与小孔的孔径大小有关,要观察到夫琅禾费衍射衍射,观察距离需要满足:

其中, z 是观察屏距离小孔的距离, r是小孔半径, λ是入射光的波长。对于入射波长为500 nm,半径为1 mm的小孔来说,在孔后2 m的范围便可以观察到夫琅禾费衍射图案,我们也可以自己做个简单的实验,在一张白纸上戳一个小孔,关闭房间的灯光,用手机闪光灯照射小孔便可以在一两米外看到闪光灯的像。而当孔的半径变大到10 mm时(比如说相机镜头的入瞳大小,相对应的,我们前面计算的50 mm,f2的透镜入瞳半径为12.5 mm),就需要在200 m外才能观察到夫琅禾费衍射的图案,此时在短距离我们无法直接观察到像。结合之前的讨论,这时候相机中镜头起到什么作用就显而易见了。
夫琅禾费衍射中,观察屏距离足够远,因此同一角度的光被认为来源于物体的同一点
夫琅禾费衍射中,透镜的参与使得在透镜的焦平面附近就可以观察到衍射图案

















 228
228

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









