







一、 MC6C入门航模遥控器简介
六通道MC6C迈克遥控器是普遍使用的一款入门航模遥控器,价格较为低廉,同时性能比较稳定,性价比较高。

1.基本参数:
遥控器:
遥控范围:大于800米
供电电源:4节普通5号电池
接收机:
尺寸:45*45*10(mm)
重量:9.6克
电源:DC:4.5~6V (可直连舵机)
2.基本组成部分
遥控器:

(1)左遥杆:全向可动,通常上下控制油门为非回中式的,左右控制偏航(以四旋翼为例)
(2)右遥杆:全向可动,通常上下控制俯仰,左右控制横滚
(3)辅助通道1:是一个三位的拔动开关,有上中下三种状态
(4)辅助通道2:是一个二位的拔动开关,有上下两种状态
(5)大小舵调节:是一个二位拔支开关,可以理解为调节主遥杆的灵敏度,向遥控正面拉为灵敏,反向为不灵敏。主要是考虑新手使用而设计的。
(6)微调开关:共有四个,分别调节左右主遥杆的上下、左右方位的基准位置。
(7)通道取反:四个开关对应四个主遥杆通道。假如你正遥控着一辆小车笔直向前,突然对应的一个通道取反开关被拔动,小车会猛得一个后退。
(8)混控设置:为下方左侧两个开关。
左数第一个:混控模式,上为V尾,下为三角翼
左数第二个:混控开关,上为使用混控,下为关闭混控
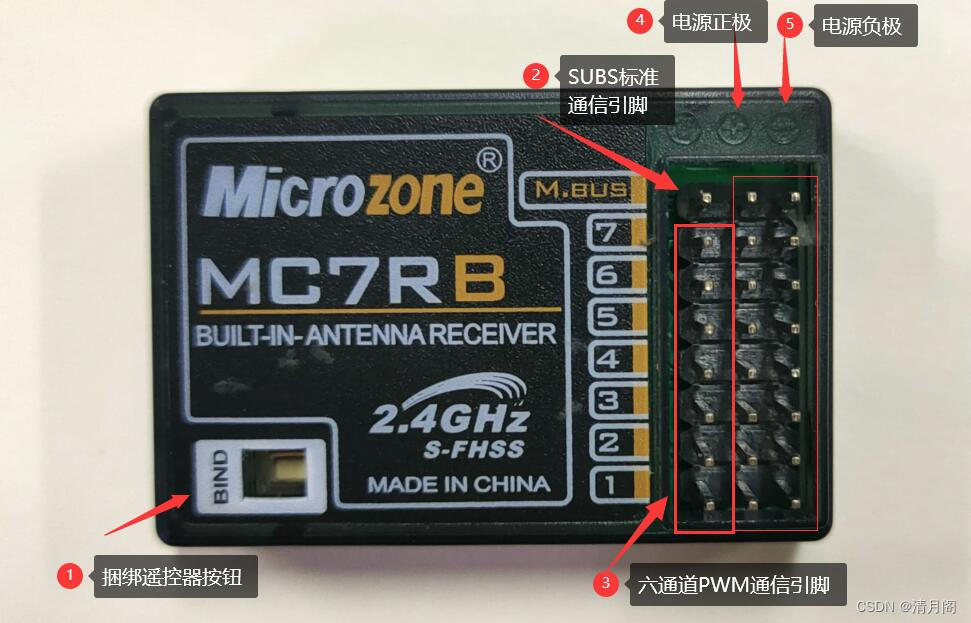
接收机:
(1)捆绑遥控器按钮:按一下会重新扫描连接遥控器。
(2) SBUS通信引脚:为标准的SBUS通信协议,与串口协议类似,之后会详细讲解。
(3)六通道PWM引脚:可以直接用来控制舵机、无刷电调,是一种PWM形式的通信协议。
(4)电源正极:8组电源引脚的正、负极是分别连通的,支持3.3V、5V电压供电,并可转接为舵机等供电。
(5)电源负极:
3.关于遥控器各通道
厂家给的说明书大多没有注明1~6通道分别对应遥杆、接收机PWM引脚、取反开关。经过实际测试,其对应关系如下:
| 通道1 | 通道2 | 通道3 | 通道4 | 通道5 | 通道6 | |
|---|---|---|---|---|---|---|
| 对应遥杆 | 右横滚 | 右俯仰 | 左油门 | 左偏航 | 辅助1 | 辅助2 |
| 取反开关 | AIL | ELE | THR | RUD |
注:AIL(ailereon):副翼 ELE(elevator):升降舵
THR(throttle):油门 RUD(rudder):方向舵
网购可以在以下链接了解:
二、操作实验
一、硬件接线

使用串口模块进行5V供电,使用通道3(偏航遥杆)进行舵机控制。
二、实验
1.横滚遥杆控制舵机
2.通道取反
3.大小舵开关调整

















 2008
2008

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









