







🙋第三章来了来了~~
CH3 GPS卫星轨道的理论和计算
⭐️思维导图出炉~~
🌺需要的uu免费自取噢~
https://download.csdn.net/download/qq_53131867/88541387
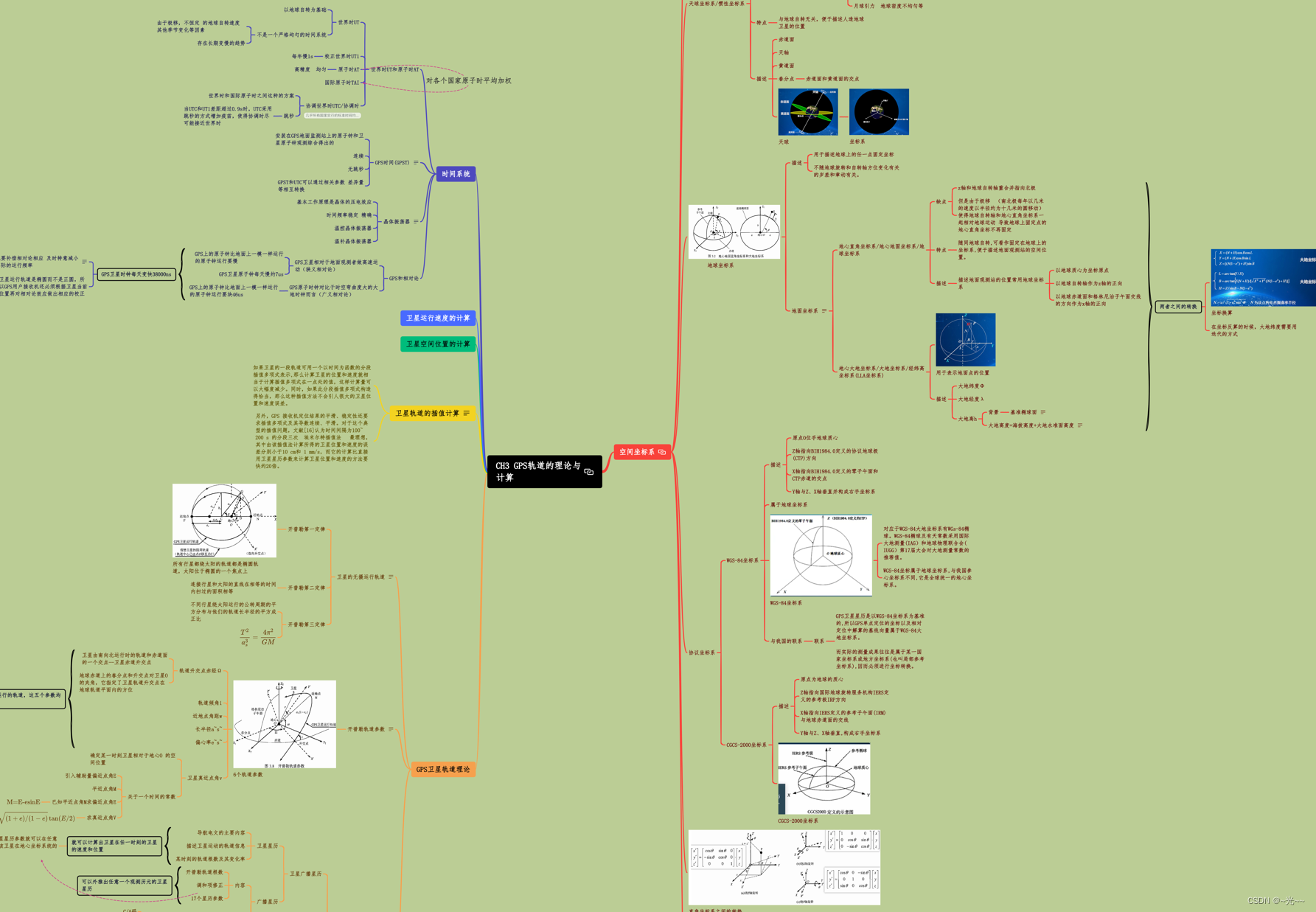
🌈 本章主要是讲的GPS轨道理论和计算 当然计算部分书里讲的特别详细~~ ⭐️ 重点是需要熟悉各坐标系 以及 时间系统
🍒空间坐标系这块
1️⃣首先是要了解几个地理的术语 比如春分点和秋分点是黄道平面和赤道平面的交点 还有什么是黄道 升交点 等等等等 当然这个确实好枯燥 但是配合图应该还好 2️⃣第二部分是关于天球坐标系和地球坐标系 重点理解他们适用的条件和各自的特点 地球坐标系包括地心大地坐标系 和地心直角坐标系 这俩的主要的使用条件 了解一下他们的坐标转换 3️⃣ 知道直角坐标系绕着轴旋转后的转换 4️⃣接着就是协议坐标系 比如WGS-84坐标系 CGCS-2000坐标系 了解一下 5️⃣ 东北天坐标系 这是我们用的比较多的坐标系 知道它的特点 后面会经常用到
🚀关于卫星轨道理论
主要讲了卫星的无摄运动下的开普勒三大定律 开普勒轨道参数 以及卫星星历参数 通过这些参数可以外推卫星再任一时刻的卫星的速度和位置 还需要了解一下 摄动力对于卫星定位的作用
🎉对于时间系统
主要熟悉各种时间的关系 世界时 协调世界时 原子时 GPS时间 GPS和相对论
🍊 关于卫星运行速度和卫星位置的计算
主要是根据卫星星历参数进行求解 具体可以看看书里的例子 个人认为大致了解就行
🌷 卫星轨道的插值计算
主要是为了减小计算量,可以将GPS接收机定位的结果利用多项式平滑化 稳定化
文章目录
3.1空间坐标系
可分为惯性坐标系和地球坐标系
3.1.0几个地理术语

地极: 南极和北极
赤道面:通过地球质心O(即地心)并与地球自转轴垂直的平面
子午面:包含地球自转轴的任一平面
子午圈:子午面和地球表面相交的大圆
时圈:以南北极为端点的半个子午圈
黄道:地球绕太阳公转的轨道平面和地球表面相交的大圆。在地球上的观测者看来,黄道是太阳相对于地球做的运动轨道在地球表面上的投影。
黄赤交角:黄道面与赤道面之间约23.5°的夹角
南黄极和北黄极:通过地心且与黄道面垂直的直线跟地球表面的两个交点分别称为南黄极和北黄极。
春分点:黄道与赤道也有两个交点,其中当太阳的投影沿着黄道从地球的南半球向北半球运动时与赤道的那个交点叫春分点。因为从地心到春分点的方向并不随地球的自转或公转而发生变化,所以春分点成为在天文学和大地测量学中的一个重要空间基准点。
3.1.1 惯性坐标系
(上图所示就是惯性坐标系)
在空间静止或做匀速直线运动的坐标系称为惯性坐标系,又称为空固坐标系。
地轴的长期运动称为岁差,而其周期运动则称为章动。岁差和章动引起天极和春分点在天球上的运动,对恒星的位置有所影响。
地心直角惯性坐标系在一小段时间内是可以近似地视为做匀速直线运动的惯性坐标系。
3.1.2 地球坐标系
虽然在惯性坐标系中描述卫星运行轨道相当方便,但是因为惯性坐标系与地球自转无关,所以地球上任一固定点在惯性坐标系中的坐标会随着地球的自转而时刻改变,这使得它在描述地面上物体的位置坐标时显得极为不便。
与惯性坐标系不同,地球坐标系固定在地球上而随地球一起在空间做公转和自转运动,所以它又称为地固坐标系。如此一来,地球上的任一固定点在地球坐标系的坐标就不会由于地球旋转以及与自转轴方位变化有关的岁差和章动而变化。
地球自转轴或者与其相垂直的赤道面自然是建立地球坐标系统的一个重要基准。如图所示的地心直角坐标系(XT,YT,ZT)和地心大地坐标系(Φ,λ,h)均是以地心О为坐标原点的地球坐标系,所以两者又均是地心地固(ECEF)坐标系。
地心直角坐标系通常称为地心地固直角坐标系,或者简称为地心地固坐标系,而地心大地坐标系则通常简称为大地坐标系。我们用下标“T"来代表地球坐标系,以区别于上一小节中的惯性坐标系。考虑到地球坐标系在GPS领域中的运用极为频繁,在不与惯性坐标系发生混淆的情况下,我们以后将省略此下标。
地心地固直角坐标系的Z轴与地球自转轴重合并指向北极,然而地球自转轴相对于地球并不是固定的。事实上,地球南北两极点在地球表面以每年几米的速度大致沿一个半径约十几米的小圆移动,这种现象通常称为极移。地极移动使地球自转轴和地心直角坐标系一起相对地球移动,这也会引起地球上固定点的地心直角坐标不再固定,给实际工作带来许多困难。
为了克服极移带来的困难,国际天文学联合会(IAU)和国际大地测量学协会(IAG)于1967年建议将1900~1905年间的地极实际位置的平均值作为基准点,而这个在地球体上固定的地极基准点通常称为协议地极(CTP),相应的赤道面称为协议赤道面。
以协议地极为基准点而建立的地球坐标系称为协议地球坐标系。相应地,我们可以创建协议地心直角坐标系和协议大地坐标系。因为GPS星历和历书参数采用了这种便于实际应用的协议地球坐标系,而不是无数个不同瞬间的非协议坐标系,所以我们以后只考虑协议地球坐标系,并且在不引起混淆的情况下,我们通常省略“协议”两字。
大地坐标系:经纬高坐标系

在GPS定位计算中,地心地固直角坐标系和大地坐标系之间的坐标经常需要来回相互转换。从大地坐标(Φ,λ,h)到地心地固直角坐标(x,y,z)的变换公式如下:
x
=
(
N
+
h
)
cos
ϕ
cos
λ
y
=
(
N
+
h
)
cos
ϕ
sin
λ
z
=
[
N
(
1
−
e
2
)
+
h
]
sin
ϕ
\begin{array}{l} x=(N+h)\cos\phi\cos\lambda\\ y=(N+h)\cos\phi\sin\lambda\\ z=\left[N(1-e^2)+h\right]\sin\phi\\ \end{array}
x=(N+h)cosϕcosλy=(N+h)cosϕsinλz=[N(1−e2)+h]sinϕ
其中,N是基准椭球体的卯酉圆曲率半径,e为椭球偏心率,它们与基准椭球体的长半径α和短半径b存在如下关系:
e
2
=
a
2
−
b
2
a
2
e^2=\frac{a^2-b^2}{a^2}
e2=a2a2−b2
N = a 1 − e 2 sin 2 ϕ ( 3.4 ) N=\frac{a}{\sqrt{1-e^2\sin^2\phi}} \quad(3.4) N=1−e2sin2ϕa(3.4)
反过来,从地心地固直角坐标(x,y,z)到大地坐标(Φ,λ,h)的变换公式为
λ
=
arctan
(
y
x
)
h
=
p
cos
ϕ
−
N
(
3.5
B
)
\lambda=\arctan\left(\frac{y}{x}\right)\\ h=\frac{p}{\cos\phi}-N (3.5B)
λ=arctan(xy)h=cosϕp−N(3.5B)
ϕ = arctan [ z p ( 1 − e 2 N N + h ) − 1 ] ( 3.5 C ) \phi=\arctan\left[\frac{z}{p}\left(1-e^2\frac{N}{N+h}\right)^{-1}\right]\quad (3.5C) ϕ=arctan[pz(1−e2N+hN)−1](3.5C)
p = x 2 + y 2 p=\sqrt{x^2+y^2} p=x2+y2
因为h的计算式(3.5B)含有待求的Φ,而的计算式(3.5C)反过来又含有待求的h,所以我们一般只得借助迭代法来逐次逼近、求解Φ和h的值。迭代法的计算过程一般可描述如下:不妨先假设Φ的值等于0,再由式(3.4)、式(3.5B)和式(3.5C)分别依次计算出N,h和Φ,然后再将刚得到的f重新代人式(3.4)、式(3.5B)和式(3.5C),再一次更新N, h和的值,如此循环。上述三式的迭代运算通常收敛得很快,一般经过3~4次循环迭代后就可以结束计算。
3.1.3 WGS-84坐标系
精确的协议地心直角坐标系
WGS-84坐标系(LLA),也叫经纬高坐标系(经度(longitude),纬度(latitude)和高度(altitude)LLA坐标系)
WGS-84直角坐标系与WGS-84大地坐标系之间的坐标变换,上式依旧成立。
WGS-84定义的基准椭球体是对整个地球球体的逼近,所以它必然可能与那些只逼近当地、局部地球球体的基准椭球体存在差异,导致它们与相应的大地坐标系之间的不一致。
3.1.4 直角坐标系间的璇转变换

3.1.5 站心坐标系
站心坐标系通常以用户所在的位置点Р为坐标原点,三个坐标轴分别是相互垂直的东向、北向和天向(或者称为天顶向),因而站心坐标系又称东北天(ENU)坐标系。站心坐标系的天向与大地坐标系在此点的高度方向一致。站心坐标系固定在地球上,是地球坐标系的一种。

站心坐标系的一个重要应用,在于计算卫星在用户处的观测矢量和仰角。
由地心地固直角坐标系转化为东北天坐标系的转换矩阵
S
=
[
−
sin
λ
cos
λ
0
−
sin
ϕ
cos
λ
−
sin
ϕ
sin
λ
cos
ϕ
cos
ϕ
cos
λ
cos
ϕ
sin
λ
sin
ϕ
]
\text{S}=\begin{bmatrix}-\sin\lambda&\cos\lambda&0\\ -\sin\phi\cos\lambda&-\sin\phi\sin\lambda&\cos\phi\\ \cos\phi\cos\lambda&\cos\phi\sin\lambda&\sin\phi\end{bmatrix}
S=
−sinλ−sinϕcosλcosϕcosλcosλ−sinϕsinλcosϕsinλ0cosϕsinϕ
用户位置处的卫星观测量为:
[
Δ
e
Δ
n
Δ
u
]
T
\begin{bmatrix}\Delta e&\Delta n&\Delta u\end{bmatrix}^{\mathrm{T}}
[ΔeΔnΔu]T
我们通过这个观测量就可以计算该卫星相对于用户的方位和仰角。卫星的仰角θ是观测矢量高出由东向和北向两轴所组成的水平面的角度,即:
θ
=
arcsin
(
Δ
u
(
Δ
e
)
2
+
(
Δ
n
)
2
+
(
Δ
u
)
2
)
\theta=\arcsin\left(\frac{\Delta u}{\sqrt{\left(\Delta e\right)^2+\left(\Delta n\right)^2+\left(\Delta u\right)^2}}\right)
θ=arcsin
(Δe)2+(Δn)2+(Δu)2Δu
卫星的观测矢量和天顶方向的夹角:天顶角ξ
ζ
=
π
2
−
θ
\zeta=\frac{\pi}{2}-\theta
ζ=2π−θ
卫星的方位角α 北向顺时针转到观测矢量在水平面内的投影方向上的角度
α
=
arctan
(
Δ
e
Δ
n
)
\alpha=\arctan\left(\frac{\Delta e}{\Delta n}\right)
α=arctan(ΔnΔe)
站心坐标系和大地坐标系的坐标变换(近似)
Δ
e
=
Δ
λ
⋅
a
cos
ϕ
Δ
n
=
Δ
ϕ
⋅
a
Δ
u
=
Δ
h
\begin{array}{l}\Delta e=\Delta\lambda\cdot a\cos\phi\\\ \Delta n=\Delta\phi\cdot a\\\ \Delta u=\Delta h\end{array}
Δe=Δλ⋅acosϕ Δn=Δϕ⋅a Δu=Δh
3.2 时间系统
时间实际上可以分为“时刻”和“时段”这两个不同的概念。时刻指的是发生某一现象的瞬间,是在时间坐标系统中的一个绝对时间值 ** 因为GPS 卫星的运行速度大约为4000 m/s,所以如果我们要求计算卫星在某一时刻所处位置的误差小于1m,那么确定这一时刻的误差应小于0.25 ns。与时刻不同,时段指的是某一现象的持续时间,是现象结束时刻相对于现象开始时刻的相对时间值。将在下一章定义的GPS信号传播时间,是指从卫星发射信号的时刻至用户接收到此信号的时刻这一时段,其值大致在78 ms左右。因为GPS信号以光速传播,所以只有把信号传播时间的测量误差控制在3.33 ns**以内,由此时段测量误差引人的距离测量误差才可能小于1 m
由此可见,精确地产生和测量时间信号是 GPS 实现精确定位的关键。
3.2.1 世界时和原子时
**世界时(UT)**是以地球自转为基础的一个时间系统18。由于极移、不恒定的地球自转速度和其他季节性变化等因素,世界时不是一个严格均匀的时间系统。
卫星测量学普遍采用**原子时(AT)**作为高精度的时间基准。当物质内部的原子在两个能级之间跃迁时,原子会辐射或吸收一定频率的电磁波能量,而原子钟就是以这种高度稳定的电磁波频率作为基准振荡频率,相应的原子时则是建立在原子钟守时和授时的基础之上。
国际原子时成为用来建立协调世界时(UTC)的国际标准。协调世界时简称协调时,它实际上是世界时和国际原子时两者之间的一种折中方案:一方面,协调时严格地以精确的国际原子时秒长为基础;另一方面,当协调时与世界时UT1的差距超过0.9s时,协调时采用闰秒(或称为跳秒)的方法加插1秒,使协调时在时刻上尽量接近世界时.
3.2.2 GPS时间
GPS建立了其专用的、基于原子时的GPS时间(GPST )系统,它的秒长是根据安装在GPS地面监测站上的原子钟和卫星原子钟的观测量综合得出的。GPS时间是连续的,没有类似于协调时的跳秒现象。
GPS卫星上的周内时计数器以每1.5 s计数一次的频率进行计数,周内时计数值与GPS时间一一对应。GPS时间的最小值为0,最大值不超过604 800 s,并且它在每星期六午夜零时从0开始逐渐增大,经过–周(即604 800 s )后又返回至0,同时星期数(WN)增加1。
GPS时间的原点是这样规定的:GPS时间的零时刻与协调时的1980年1月6日(星期日)零时刻相一致。自那一时刻起,GPS时间开始周而复始地计数。同时,也正在那一刻,GPS时间和协调时均落后国际原子钟19 s。随后,美国海军天文台(USNO)定期将其所维持的协调时与GPS时间相比较,并控制GPS时间,使之与国际原子时保持同步。
我们在这里需要特别指出GPS 时间与各个卫星时钟时间的关系。每颗卫星按照其本身的时钟运行,比如卫星信号的发射是在卫星时钟的驱动下进行的,而GPS 的地面监控部分保证各颗GPS 卫星的时钟与GPS时间的差异维持在1 us之内。在卫星播发的导航电文中,除了遥测字和交接字的时间数据基于卫星时间以外,其余的数据均以GPS 时间为基准。
3.2.3 晶体振荡器
GPS接收机一般采用价格比较便宜的石英晶体振荡器作为时间,频率来源。
石英晶体振荡器的长期稳定度很差,而老化问题是晶体谐振频率在长期时段内频率不稳定的主要原因。影响晶体振荡器短期不稳定度的主要原因是振荡器电路中的噪声。若提供适宜的工作环境,则石英晶体振荡器的短期稳定度会很高,甚至可与原子钟的稳定度相媲美。
因为温度、湿度、压力和振动等环境状况的变化可使晶体振荡器的谐振频率随之发生改变,所以为了降低环境因素以稳定晶体振荡器的谐振频率,我们可将晶体振荡器放在恒温器中工作,并称之为温控晶体振荡器(OCXO)。如果没有条件采用这种温控晶体振荡器技术,那么温补晶体振荡器(TCXO)是另一种切实可行的方案。温补晶体振荡器利用温度传感器感应环境温度的变化,并将温度变化量转变为一个电压校正信号,然后用此校正信号来修正振荡器电路中的电抗量,以补偿由温度变化而引起的谐振频率变化,从而稳定晶体振荡器的频率。一个稳定的接收机晶体振荡器,将有助于接收机锁定GPS 卫星信号。
3.2.4 GPS和相对论
我们知道,GPS卫星在离地心大约为26 560 km的高空轨道上运行,运行速度约为4000 m/s,运行周期约为11小时58分。我们在本节开头讲到,对GPS信号传播时间3.33 ns的测量误差对应着1 m的距离测量误差。因此,只**有将GPS 卫星的时钟误差控制在20~30 ns 以内,GPS才有可能成为具有实际应用价值的精确定位系统。**精密的GPS 卫星原子钟以及GPS地面监控部分对卫星原子钟的进一步监视、校正,使得校正后的卫星原子钟误差可控制在几个纳秒之内。
然而,GPS卫星相对于地面上的观测者在做高速运动,由此产生的相对论效应对GPS来说不可忽略。狭义相对论指出,高速运动的GPS卫星在地面上看起来呈时间膨胀现象,也就是说,GPS 卫星上的原子钟比在地面上一模一样的原子钟运行要慢。根据狭义相对论,我们可以计算、预测出GPS卫星原子钟每天要变慢约7 us
另一方面,GPS卫星在高空运行,而离地球越远,则由地球质量引起的时空弯曲度越小。广义相对论预测,对比在时空弯曲度较大的地面上的原子钟,运行于时空弯曲度较小的卫星原子钟在地面上看起来会变快。通过计算表明,GPS卫星原子钟比在地面上一模一样的原子钟每天要快
约45us
综合以上狭义和广义相对论的共同作用,在高空中高速运行的卫星原子钟比它们在地面上时每天大致要快38 us。这就是说,GPS卫星原子钟每天要变快38 000 ns,每秒变快0.44 ns,而在两分钟之内卫星原子钟的时间误差就可以超过50 ns。因此,如果我们在地面上设计GPS卫星原子钟时不考虑相对论,那么GPS 卫星发射上空仅两分钟后,卫星原子钟的运行就会失控,卫星随即就会报废。
卫星时钟提供的基本频率f为10.23 MHz。为了补偿相对论效应,我们在地面上设计卫星时钟时,必须特意减小它的实际运行基本频率fo至10.229 999 995 43 MHz,即频率调整量△f 为-0.004 57 Hz。这样,一旦GPS卫星被发射升空后,它的时钟频率在地面上看起来正好等于我们所需要的10.23 MHz这个设计值
同时,因为卫星运行轨道是个椭圆而不是正圆,所以地面上的GPS用户接收机还必须根据卫星的当前位置再对相对论效应做适当校正。
3.3 卫星轨道理论
GPS接收机在定位时需要知道各个可见卫星在某一任意时刻的空间位置,而随时间变化的卫星空间位置称为卫星的运行轨道。
3.3.1卫星的无摄运行轨道
人造地球卫星在空间围绕地球运行时,它主要受到来自地球的引力影响。假设地球和卫星都是一个均质的理想球体,并且地球引力是卫星受到的唯一外力,那么在这种理想状态下的卫星运行轨道称为无摄运行轨道,它可以用开普勒(1571-1630)所发现的三大行星运动定律来描述。
开普勒第一定律 :所有行星绕太阳运行的轨道都呈椭圆,太阳位于椭圆的一焦点上。
开普勒第二定律: 连接行星和太阳的直线在相等的时间内扫过的面积相等。

该定律指出,卫星运行速度是时刻变化的,在近地点时最快,而在远地点时最慢,这是卫星在运行过程中其动能与势能时刻相互交换的结果。在近地点处,卫星势能最低,因而它的速度达到最大。
开普勒第三定律: 不同行星绕太阳运行的公转周期的平方分别与它们的轨道长半径的立方成正比
T
2
a
s
3
=
4
π
2
G
M
\frac{T^2}{a_s^3}=\frac{4\pi^2}{GM}
as3T2=GM4π2
3.3.2 开普勒轨道参数
GPS接收机并不是从牛顿万有引力定律出发来计算卫星的空间位置的。事实上,GPS的地面监控部分通过持续接收、测定卫星所发射的信号来确定卫星的运行轨道,然后推算出一组以时间为函数的轨道参数来精确描述、预测卫星的运行轨道,再将这些轨道参数上传给卫星,并让卫星转播。GPS接收机正是从卫星信号上获取这些参数,然后利用这些参数计算出卫星的位置和速度的。
GPS卫星的无摄椭圆轨道运动可用一套应用广泛的开普勒轨道参数来描述,而每套开普勒轨道参数总共包含6个:轨道升交点赤经Ω、轨道倾角i、近地点角距w、长半径as、偏心率es,和卫星的真近点角v。 这些参数一起完全指定了某一时刻的卫星相对于地心O的空间位置。

轨道升交点赤经Ω:地球赤道平面的春分点和升交点对 地心O 的夹角。它指定了卫星轨道升交点在地球赤道平面内的方位。
轨道倾角i:卫星轨道平面和赤道面之间的夹角。它与升交点赤经Ω仪器充分决定了卫星轨道平面对于地心的方位。
近地点角距w: 卫星轨道平面上的升交点和近地点N之间的地心夹角。
长半径as、偏心率es 具体规定了椭圆大小和形状
卫星的真近点角v:它是卫星在运行轨道上的当前位置S与近地点N之间的地心夹角
由于GPS卫星星历上实际不直接给出真近点角v,而是引入了两个辅助量来代替并推导出真近点角,分别是偏近点角E和平近点角M。
卫星赤道升交点:卫星赤道升交点简称升交点,它是卫星由南向北运行时的轨道与赤道面的一个交点。
3.3.3 卫星星历和参数
卫星除了受到地球的引力,还受到其他天体的引力,和各种因素的影响。
星历参数toe为一套星历参数的参考时间。若当前的GPS时间在toe前后的2小时之内,则这套星历参数被认为是有效的,也就是说,一套星历参数的有效期是以toe为中心的4小时。每颗卫星只播发关于其自身的星历,并且通常每两小时播发一套新的星历参数,但在某些特殊或紧急情况下,卫星也可能会加插播发一套新的星历参数。为了更好地鉴别一套星历的有效期,接收机通常在所获得的星历中添加一个其被播发时的星期数(WN)参量,从而消除由于不同星期存在相同GPS时间这一事实所可能引起的混淆。
同一颗卫星的星历与历书参数是由GPS地面监控部分相互独立地推算出来的,换句话说,它们之间的差异不但是参数个数多少的不同,而且描述同一个卫星轨道的星历和历书中通常有着互不相同的参数值。历书省去了星历中的一些摄动校正量,其中的1个主要原因是为了减少传播和保存历书所需的字节数。同时,对于有效期为半年以上的历书来说,星历中那些短期有效的摄动校正量没有多大意义,甚至根本不适于历书模型。
3.4 卫星空间位置的计算
可以看看这个 卫星位置计算基础讲解 - momo的文章 - 知乎
https://zhuanlan.zhihu.com/p/146359075
3.5 卫星运行速度的计算
如果我们只要求用户GPS接收机实现定位,那么一般来说计算出各颗可见卫星的空间位置应当就足够了。如果我们还要求确定用户的运动速度,那么接收机还需要计算出各颗卫星的运行速度。
简单地讲,卫星的运行速度等于卫星的空间位置对时间的变化率。
3.6卫星轨道的插值计算
如果卫星的一段轨道可用一个以时间为函数的分段插值多项式表示,那么计算卫星的位置和速度就相当于计算插值多项式在一点处的值,这样计算量可以大幅度减少。同时,如果此分段插值多项式构造得恰当,那么这种插值方法不会引入很大的卫星位置和速度误差。另外,GPS接收机定位结果的平滑、稳定性还要求插值多项式及其导数连续、平滑。对于这个典型的插值问题,有文献认为时间间隔为100~200 s的分段三次埃米尔特插值法最理想,其中由该插值法计算所得的卫星位置和速度的误差分别小于10 cm和 1 mm/s,而它的计算比直接用卫星星历参数来计算卫星位詈和速度的方法要快约20倍。
🌈ok,完结~ (●ˇ∀ˇ●)点个赞 点个赞~



















 2205
2205

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











