







 本文详细介绍了如何使用MATLAB将urdf格式的机器人模型转换为Simscape物理模型,并涉及关节部分的替换和STL文件的处理,以进行六轴机器人的运动仿真学习。
本文详细介绍了如何使用MATLAB将urdf格式的机器人模型转换为Simscape物理模型,并涉及关节部分的替换和STL文件的处理,以进行六轴机器人的运动仿真学习。
【MATLAB六轴机器人运动仿真学习记录】 https://www.bilibili.com/video/BV1a54y1z74q/?p=10&share_source=copy_web&vd_source=9e3e013d351349501787efa88d17f2e4
1.将urdf生成slx文件
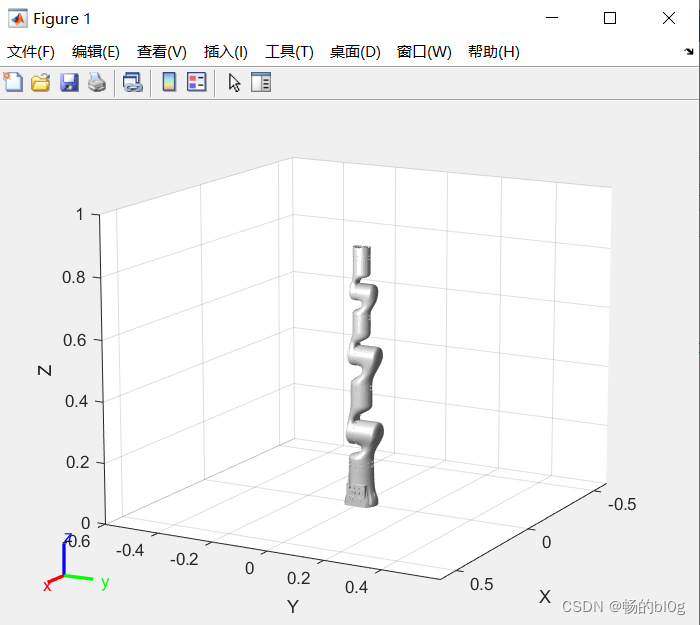
smimport('rm_65_flange.urdf');%生成Simscape物理模型

2.更换joint部分(对应与几个输入几个输出)(依次更换)
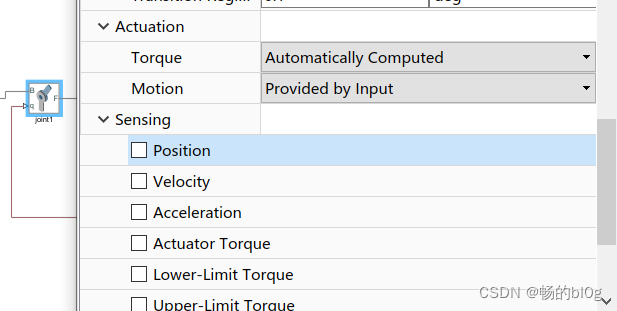
3.更改关节部分(依次更换)

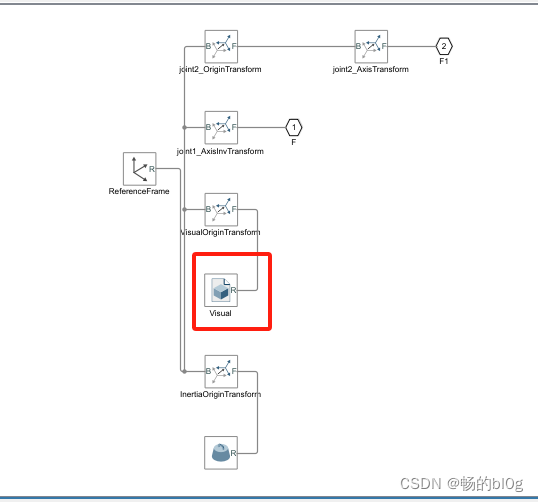
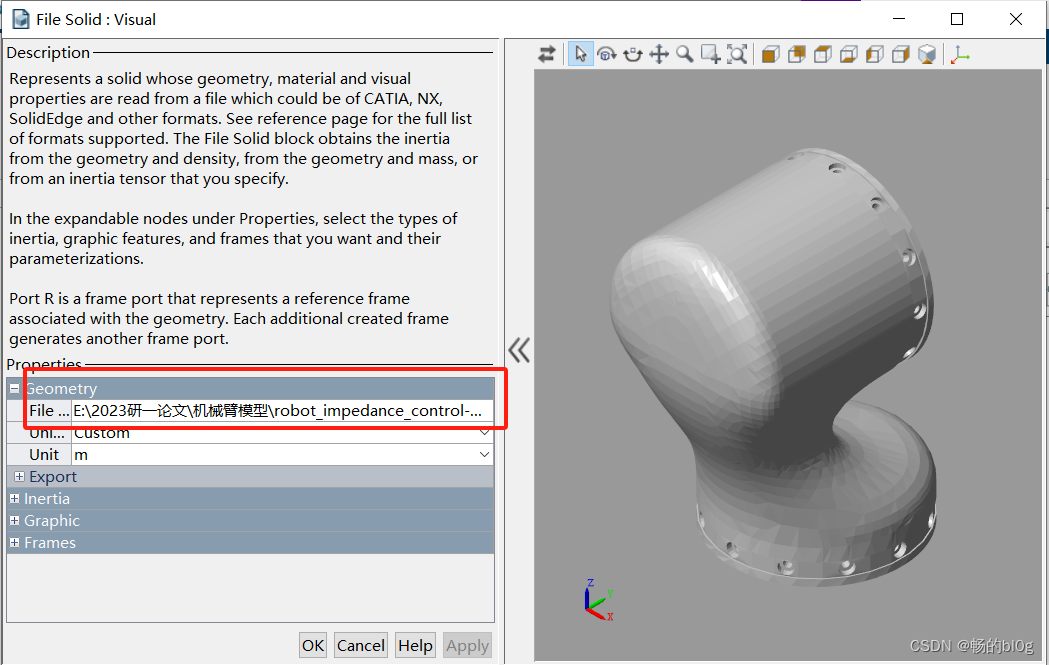
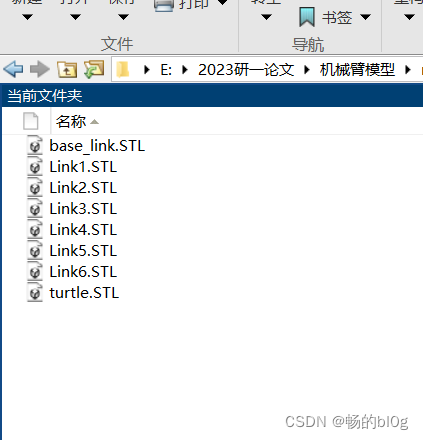
找到urdf文件夹下的meshes文件夹,看到里面的STL文件















 3050
3050

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









