






1.在官网下载soildworks to urdf插件,安装成功后可能需要电脑重启或者soildworks重新打开。
2.标注点,坐标系以及转轴。对sw中的机械臂模型底盘,各个关节,以及机械臂末端进行点,坐标系,转轴的标注。
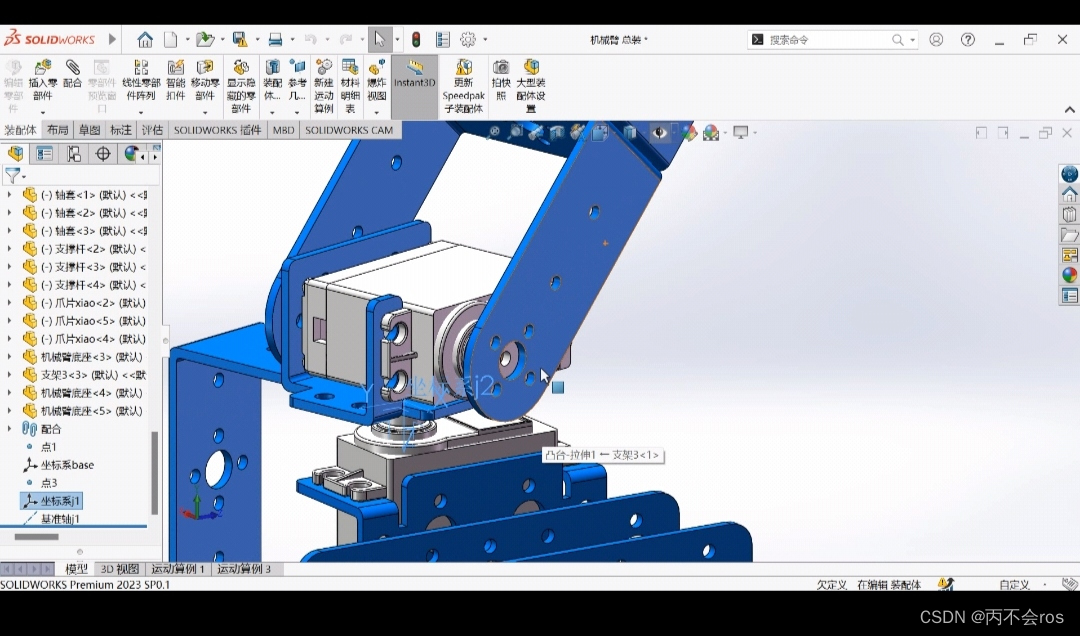
注:机械臂底盘和末端不需要标注转轴,关节的转轴是坐标系z轴的方向,也就是垂直舵机的转动方向,坐标系的x,y轴可以随意。
3.编辑并导出urdf模型。在搜索栏搜索urdf explorer。选择对应关节的坐标系和转轴,底盘和末端的转轴选择none。关节转动的角度改为-3.14到3.14,视自己要转的模型而定,点击导出urdf,选择路径和名称。
4.把urdf模型放进ros的工作空间中进行编译,然后运行。














 7832
7832











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









