






#一个终端启动ros master
roscore
#一个终端设置ros参数
rosparam set use_sim_time true
#一个终端启动launch文件
cd ~/catkin_ws && source devel/setup.bash
roslaunch hdl_graph_slam hdl_graph_slam_501.launch
#一个终端用于可视化map
cd ~/catkin_ws && source devel/setup.bash
rosrun rviz rviz -d ~/catkin_ws/src/hdl_graph_slam/rviz/hdl_graph_slam.rviz
#一个终端用于播放rosbag
rosbag play --clock hdl_501_filtered.bag
或者:
rosbag play --clock hdl_501.bag
#一个终端用于调整播放速度
rosrun hdl_graph_slam bag_player.py hdl_501_filtered.bag
效果不理想,没有改动launch,直接下载git里的代码运行
突然发现!!!是使用虚拟机的软件问题!我是用的VBOX,但是用vmware就可以,而且把vmware的虚拟机导出到vbox里面照样不能用!!!
并且在vmware导入虚拟机的方法是直接打开虚拟机,导入.ovf文件即可,不需要修改什么.vmdk.iso的配置,打开时有一些错误可以在网上搜索到
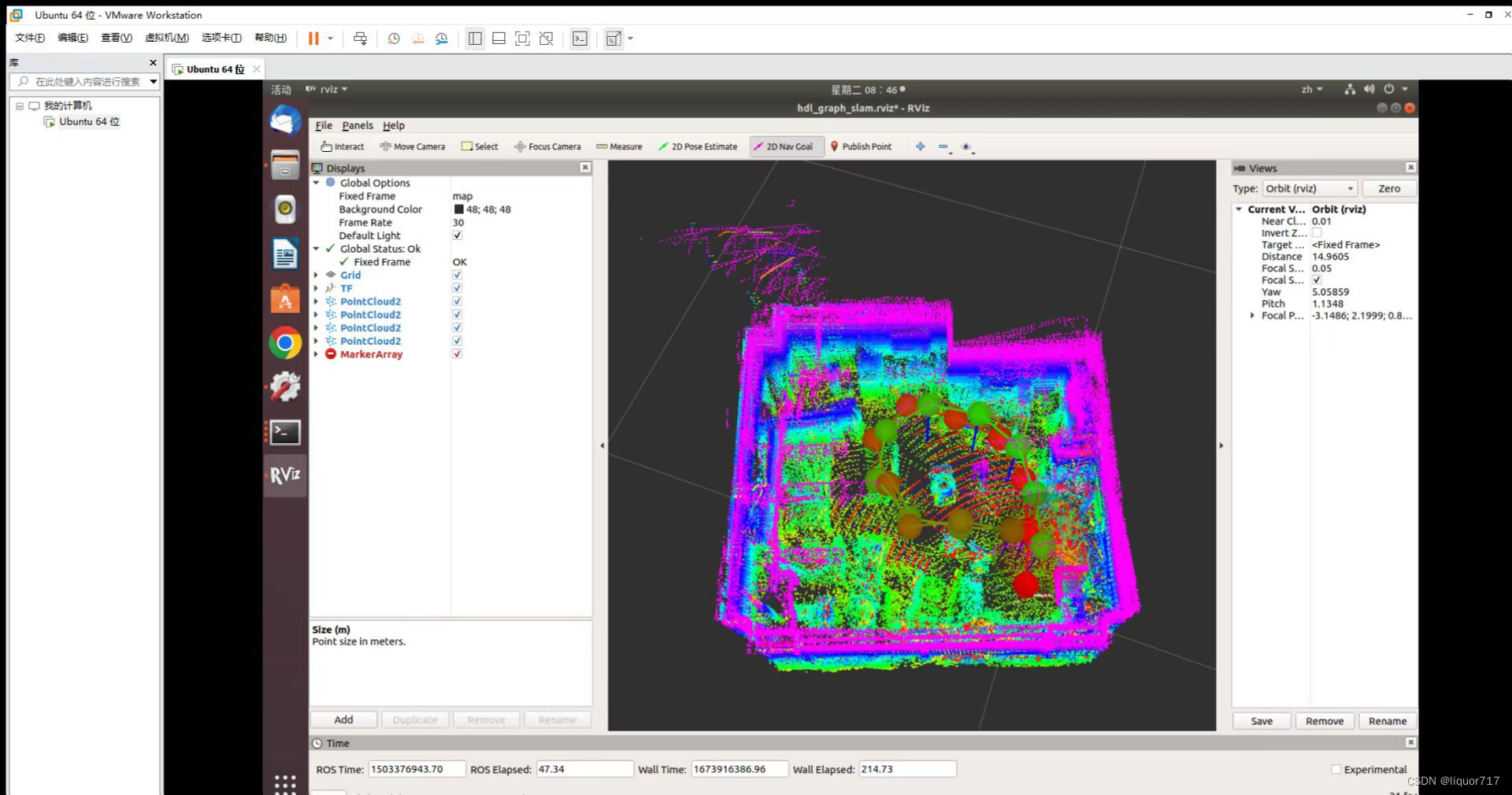
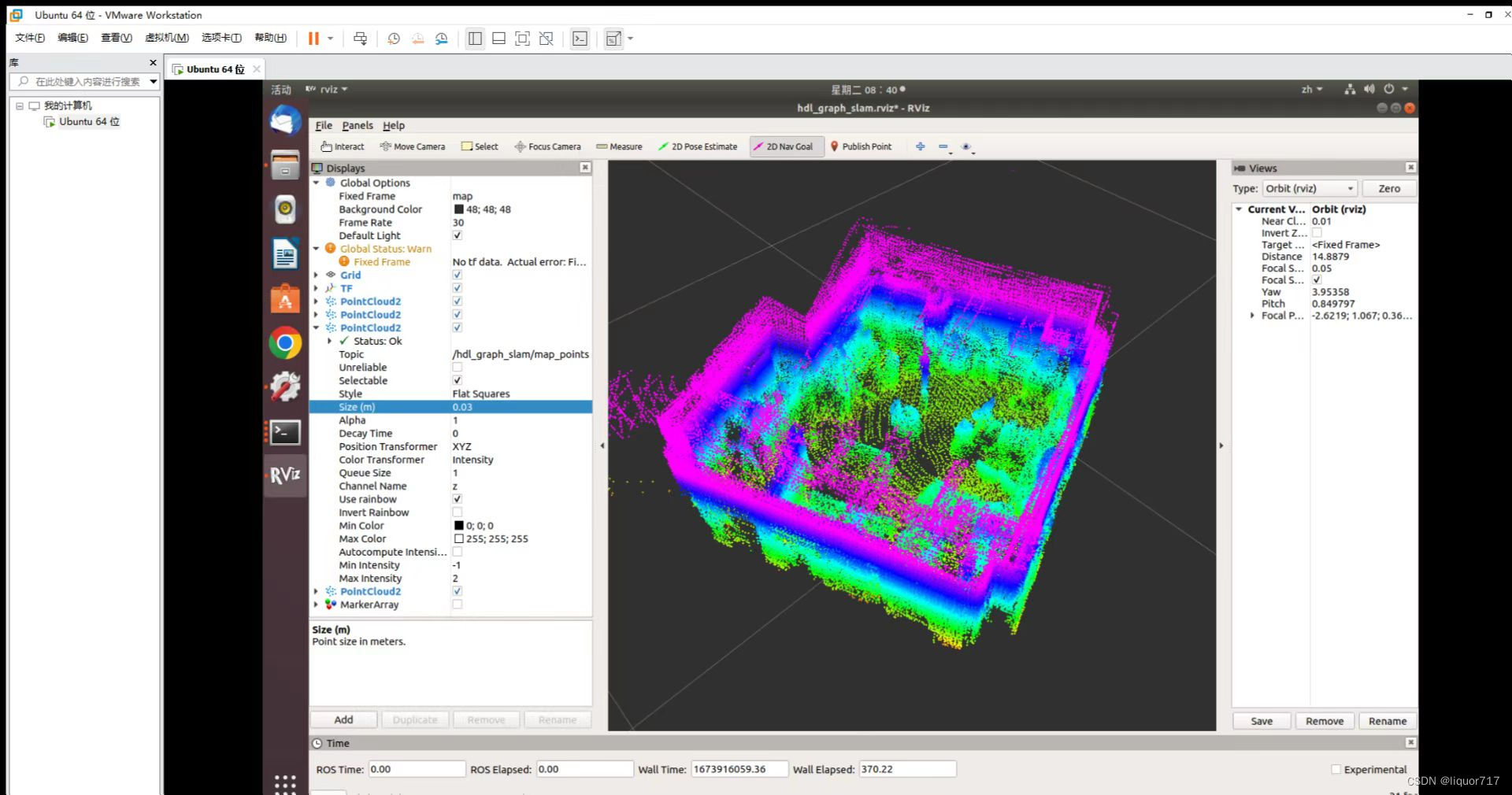
下面是运行结果















 230
230











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









