







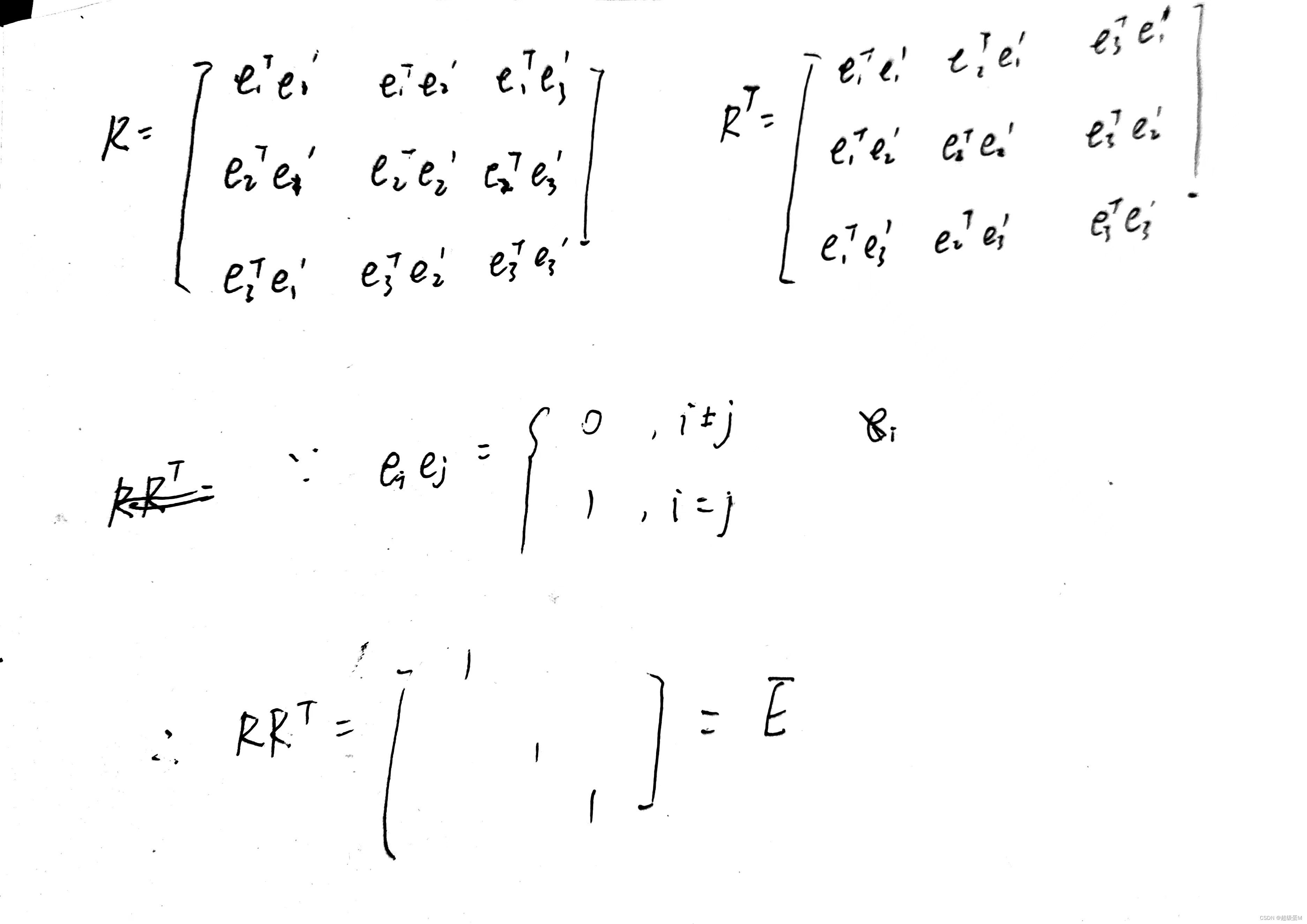
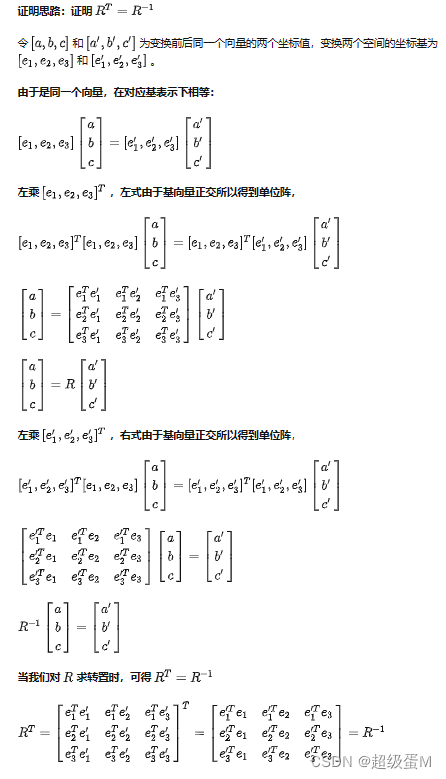
1.验证旋转矩阵是正交矩阵。
解法一:
解法二:
2.寻找罗德里格斯公式的推导过程并加以理解。
3.验证四元数旋转某个点后,结果是一个虚四元数(实部为零),所以仍然对应到一个三维空间点,见式(3.33)。
略
4.画表总结旋转矩阵、轴角、欧拉角、四元数的转换关系。
- 旋转矩阵:参数冗余,没有奇异性,自身存在约束(正交矩阵),不直观
- 旋转向量:又称轴角。紧凑,存在奇异性,不存在自身约束,不直观
旋转矩阵与旋转向量之间转换:罗德里格斯公式 - 欧拉角:直观,紧凑,存在奇异性(万向锁)
- 四元数:既紧凑,又没有奇异性,不直观,运算稍复杂
四元数与旋转矩阵之间转换见书中公式推导
5.假设有一个大的Eigen矩阵,想把它的左上角3x3的块取出来,然后赋值为 I 。请编程实现。
#include <iostream>
using namespace std;
#include <Eigen/Core>
using namespace Eigen;
#define MATRIX_SIZE 5
int main(){
MatrixXf M=Matrix<float,MATRIX_SIZE,MATRIX_SIZE>::Random();
Matrix3f I;
cout<<"The large matrix:"<<endl<<M<<endl;
for(int i=0;i<3;i++){
for(int j=0;j<3;j++){
I(i,j)=M(i,j);
}
}
cout<<"----------------I-----------------"<<endl<<I<<endl;
}
6.一般线性方程Ax=b有哪几种做法?你能在Eigen中实现吗?
一般线性方程Ax=b的求解可以采用以下几种方法:
- 直接求逆求解方程。
- 直接法:包括高斯消元法、LU分解、Cholesky分解等。这些方法通过消元或分解矩阵A,将线性方程组转化为更简单的形式,从而求解出未知变量x。可以使用高斯消元法进行直接求解。
- D迭代法:包括雅可比迭代法、高斯-赛德尔迭代法、共轭梯度法等。这些方法通过迭代计算,逐步逼近线性方程的解。可以使用共轭梯度法进行迭代求解。
几种求解方法的代码如下
#include <iostream>
using namespace std;
#include <Eigen/Core>
#include <Eigen/Dense>
#include <Eigen/IterativeLinearSolvers>
using namespace Eigen;
int main(){
Matrix3f A;
Vector3f x,b;
A << 2,5,2,
1,7,9,
5,4,0;
b << 3,4,5;
// 直接求逆
x=A.inverse()*b;
cout<<"直接求逆:"<<endl<<x<<endl;
// 直接法QR分解
x=A.colPivHouseholderQr().solve(b);
cout<<"QR分解:"<<endl<<x<<endl;
// 直接法LU分解
x=A.lu().solve(b);
cout<<"LU分解:"<<endl<<x<<endl;
// 迭代法(共轭梯度)
int maxIterations = 100; //最大迭代次数
float tolerance = 1e-4; //容差值
ConjugateGradient<Matrix3f> cg; //共轭梯度求解器
cg.setMaxIterations(maxIterations);
cg.setTolerance(tolerance);
cg.compute(A);
x = cg.solve(b);
cout<<"共轭梯度迭代法:"<<endl<<x<<endl;
// cout << "iterations: " << cg.iterations() << endl;
// cout << "estimated error: " << cg.error() << endl;
}

















 4116
4116

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









