







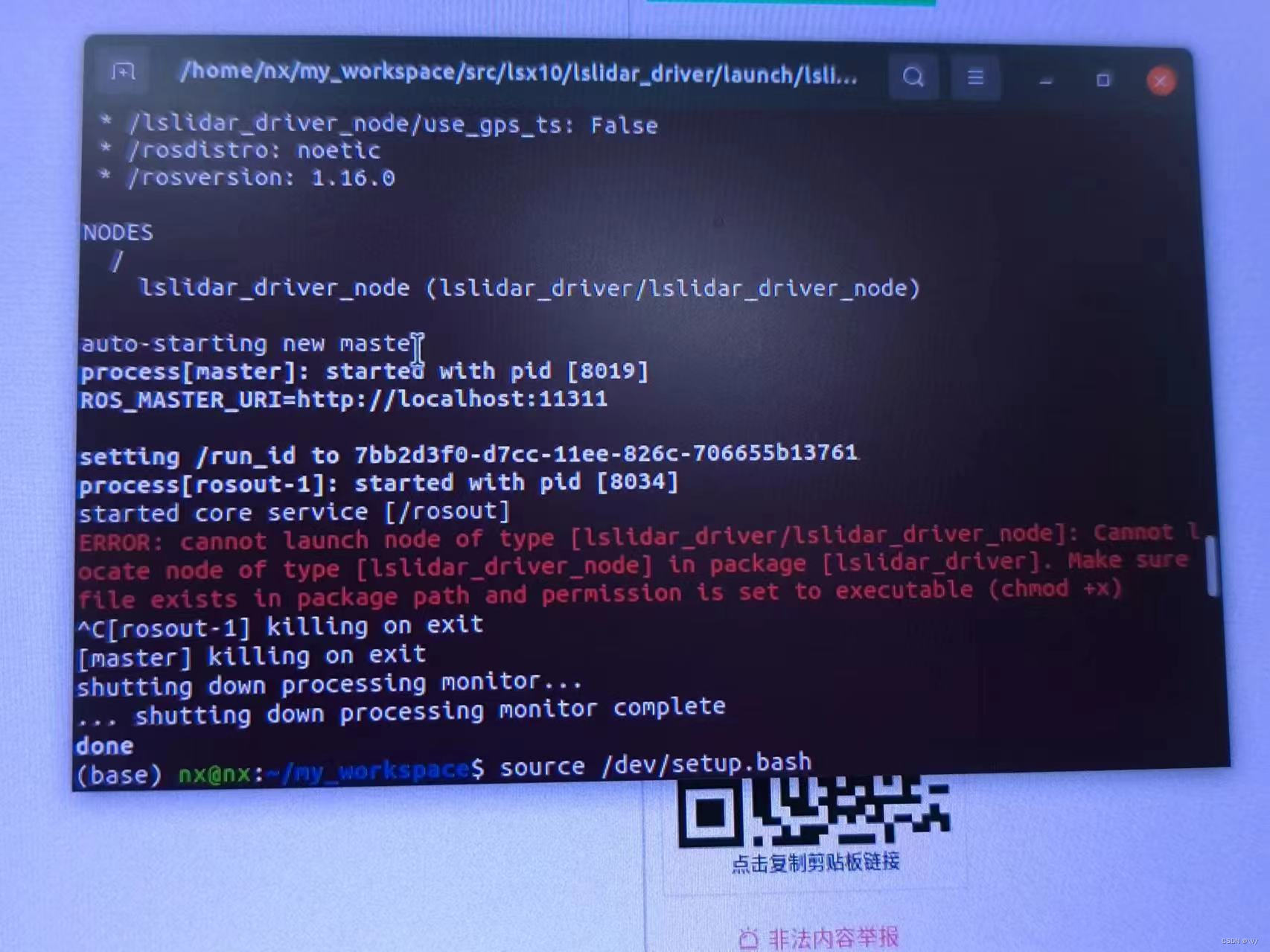
运行:
roslaunch lslidar_driver lslidar_serial.launch完整报错内容:ERROR: cannot launch node of type [lslidar_driver/lslidar_driver_node]: Cannot locate node of type [lslidar_driver_node] in package [lslidar_driver]. Make sure file exists in package path and permission is set to executable (chmod +x)
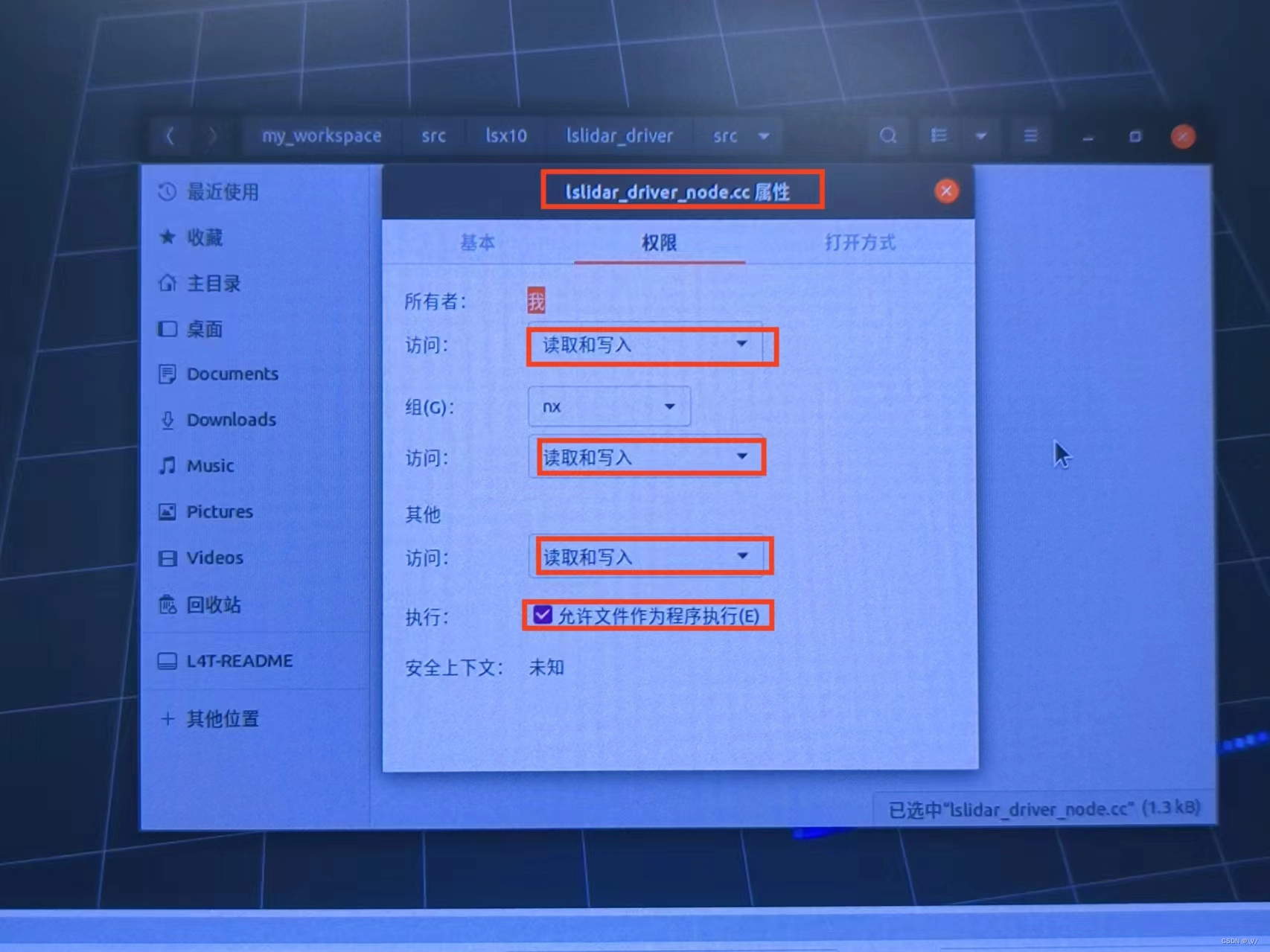
解决方法:将雷达的launch文件和node文件的权限全部设置为“读取和写入“,并选择”允许文件作为程序执行“

之后执行:(source后跟你的”setup.bash“文件的实际路径)
source '/home/nx/my_workspace/devel/setup.bash'用以更新环境变量
之后继续运行
roslaunch lslidar_driver lslidar_serial.launch此时应该可以成功启动雷达节点,启动成功如图:















 1037
1037











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









