







运行:
roslaunch lslidar_driver lslidar_serial.launch显示报错:(或者显示open_port /dev/wheeltec_lidar ERROR !)
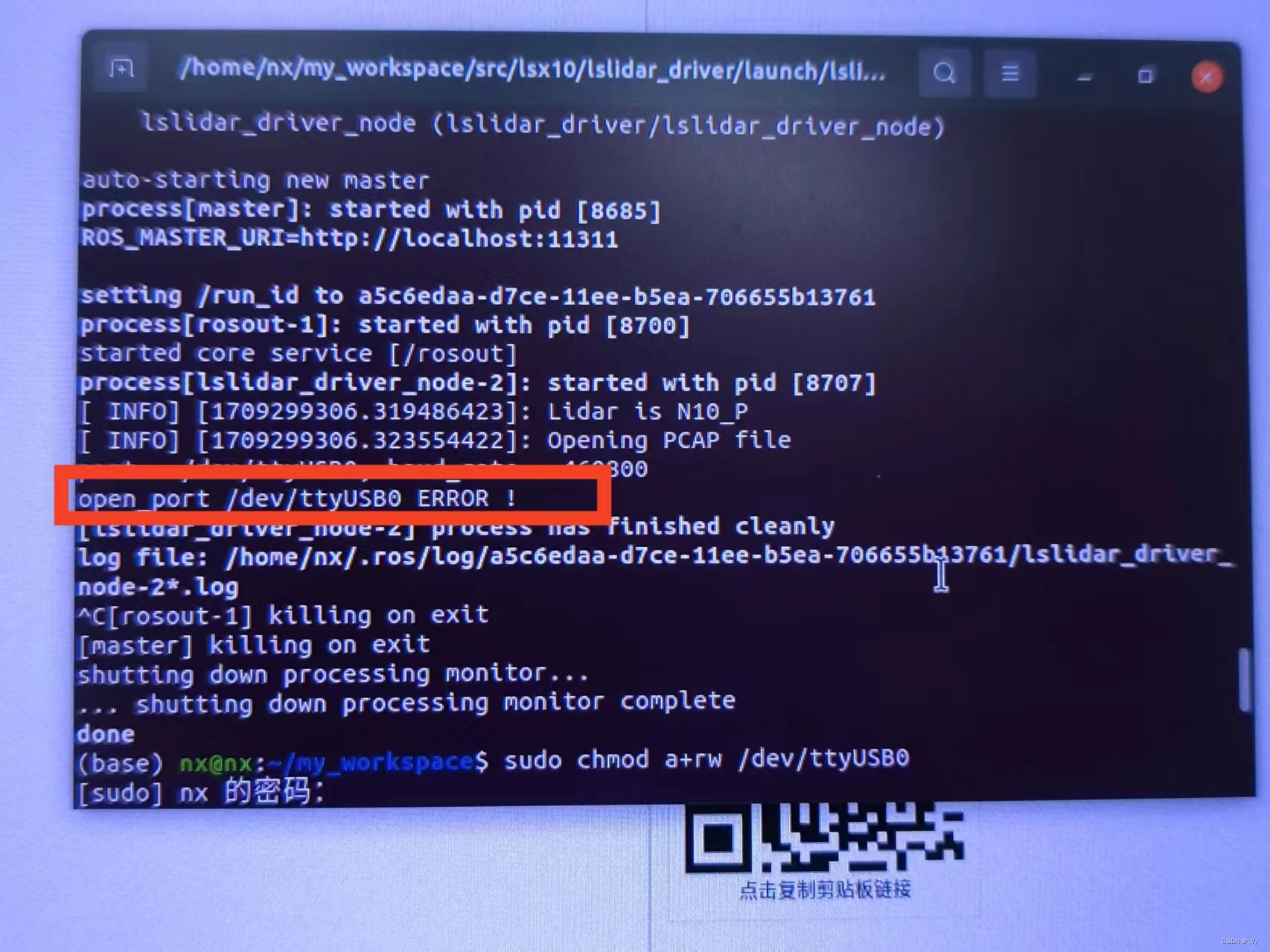
解决方法:给串口增加权限
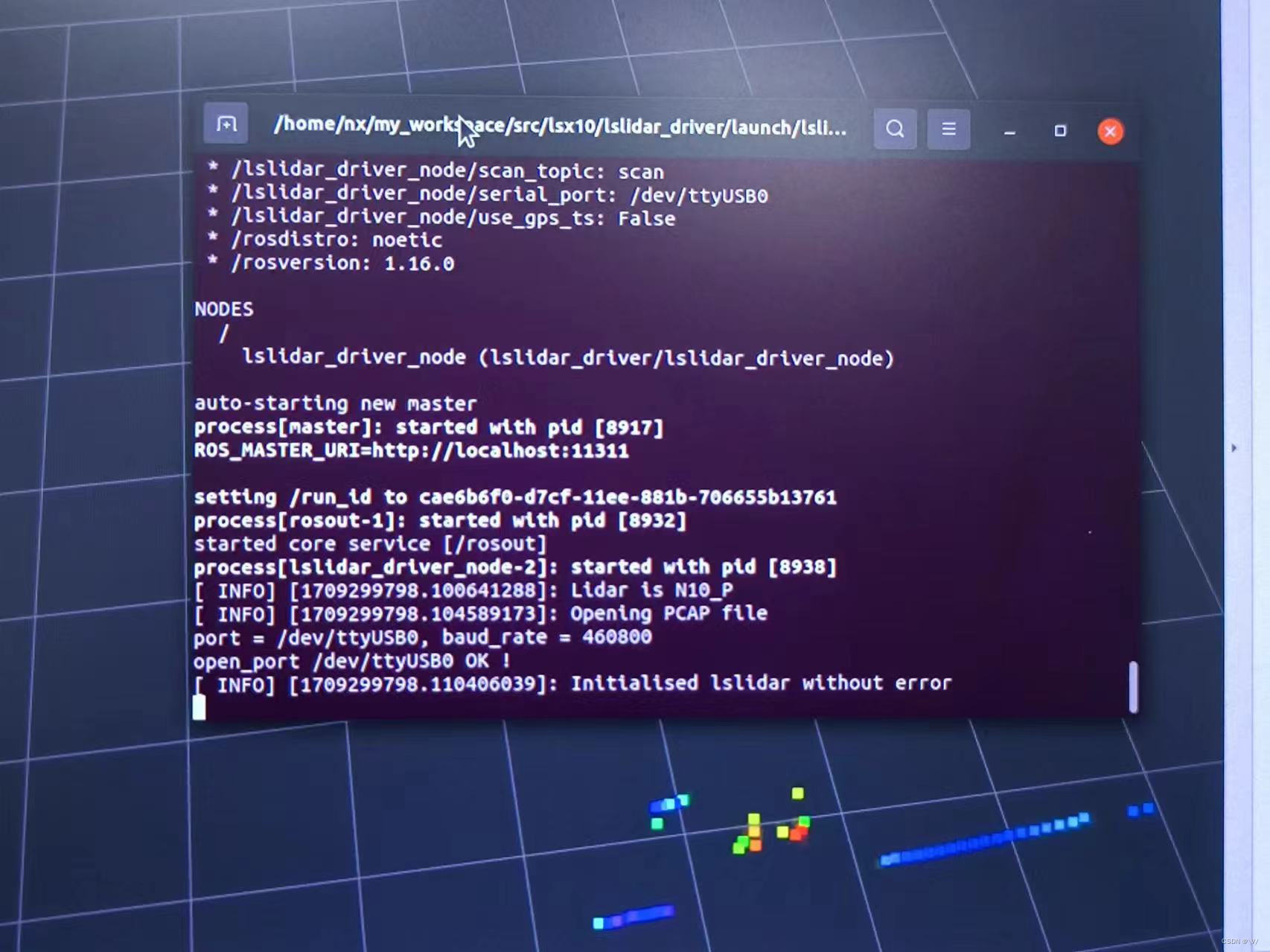
sudo chmod a+rw /dev/ttyUSB0之后继续执行:
roslaunch lslidar_driver lslidar_serial.launch此时雷达节点应该能成功启动,如图:
运行:
roslaunch lslidar_driver lslidar_serial.launch显示报错:(或者显示open_port /dev/wheeltec_lidar ERROR !)
解决方法:给串口增加权限
sudo chmod a+rw /dev/ttyUSB0之后继续执行:
roslaunch lslidar_driver lslidar_serial.launch此时雷达节点应该能成功启动,如图:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 1630
1630





