







作者解释
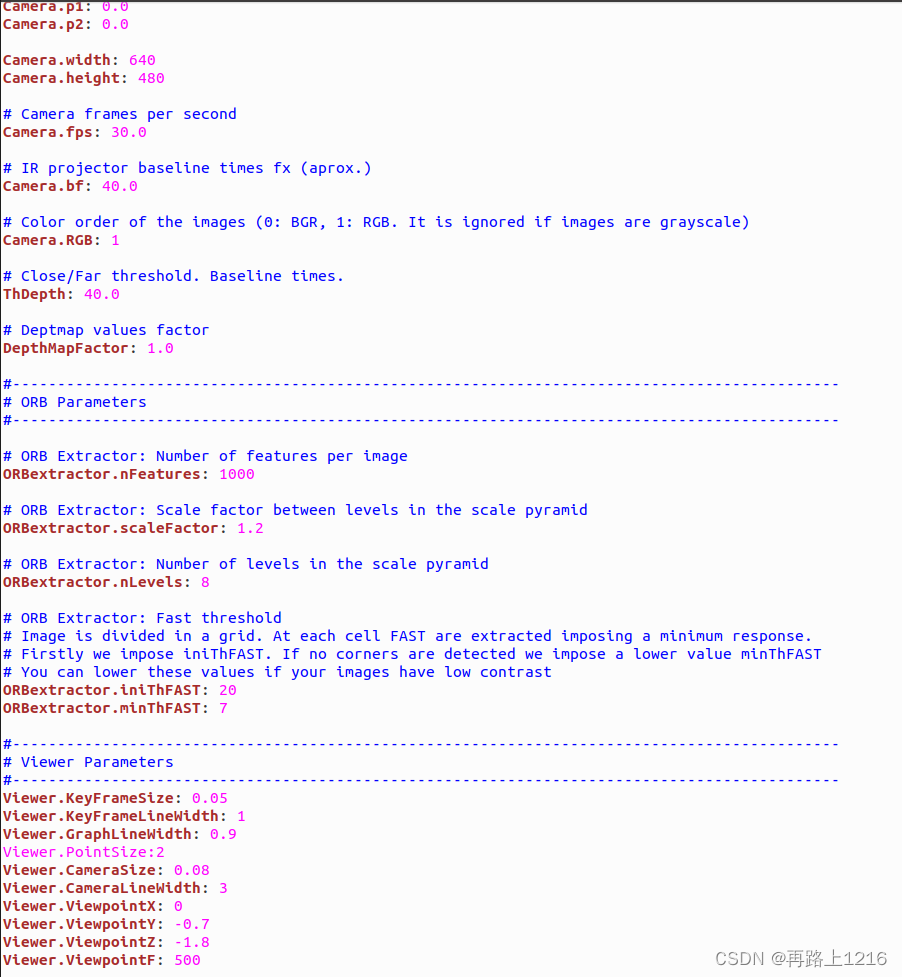
1、camera.bf
基线距离(单位:米) * fx(单位:像素)
2.ThDepth
深度阈值,用于区分特征点是近点是远点。
双目关键点的深度如果小于40倍基线长度的值,就被叫做近关键点,否则就是远关键点。近关键点可以较好的被三角化,并提供尺度,平移,旋转信息。而远关键点可以提供比较好的旋转信息,但只能有比较差的尺度和平移信息,远点用多视角进行三角化。
3. DepthMapFactor(用于RGBD)
DepthMapFactor是一个比例系数,根据TUM数据集官网的说明,对于RGB-D数据集,深度图像的缩放系数为5000,即深度图像中的像素值为5000,对应于离摄像机1米的距离,10000对应于2米的距离,等等。像素值为0意味着缺失值/没有数据。
DepthMapFactor=5000(对于16bit的PNG图片);而在ROS下运行时,DepthMapFactor=1(对于ROS bag文件中的32bit的浮点图)。















 1755
1755











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









