










一: 回顾USART 已经内容补充
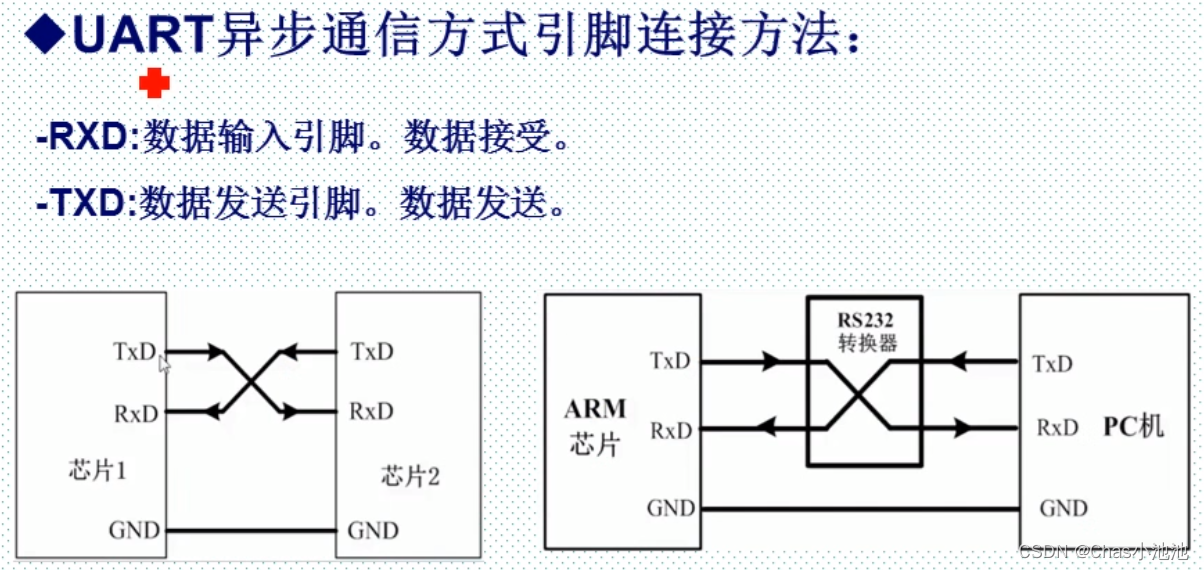
1.回顾USART (具体内容见以往文件)

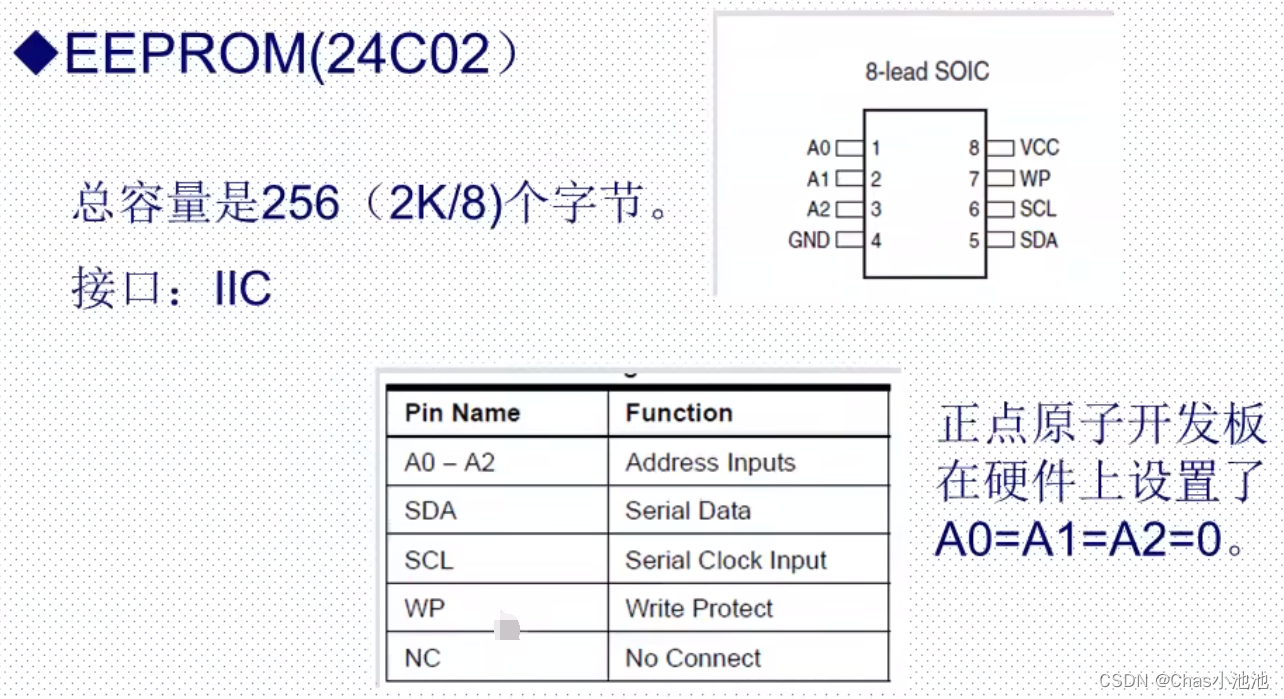
2.IIC通信(了解就好)
1.IIC是半双工通信方式

2. 多主机IIC总线系统结构

3.IIC协议
[1]空闲状态
IIC总线的SDA和SCL两条信号线同时处于高电平时,规定为总线的空闲状态。
此时各个器件的输出级场效应管均处在截止状态,也就是释放总线,由两条信号线各自的上拉电阻把电平拉高
[2]起始信号与停止信号
起始信号: 当SCL为高期间,SDA由高到低的跳变;启动信号时一种电平跳变时序信号,而不是一个电平信号
停止信号: 当SCL为高期间,SDA由低到高的跳变;启动信号时一种电平跳变时序信号,而不是一个电平信号

[3]应答信号ACK
发送器每发送一个字节,就在时钟脉冲9期间释放数据线,由接收器反馈一个应答信号。应答信号为低电平时,规定为有效应答位(ACK简称应答位),表示接收器已经成功地接收了该字节:应答信号为高电平时,规定为非应答!位(NACK),一 般表示接收器接收该字节没有成功。
对于反馈有效应答位ACK的要求是,接收器在第9个时钟脉冲之前的低电平 期间将SDA线拉低,并且确保在该时钟的高电平期间为稳定的低电平。如果 接收器是主控器,则在它收到最后一个字节后,发送一个NACK信号,以通知 被控发送器结束数据发送,并释放SDA线,以便主控接收器发送一个停止信号P。

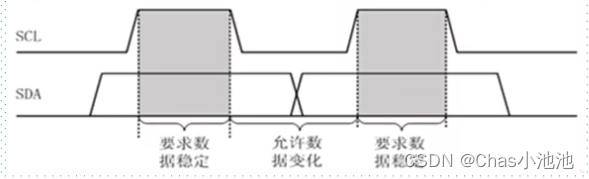
[4]数据的有效性
IIC总线进行数据传送时,时钟信号为高电平期间,数据线上的数据必 须保持稳定,只有在时钟线上的信号为低电平期间,数据线上的高电平 或低电平状态才允许变化。 即:数据在SCL的上升沿到来之前就需准备好。并在在下降沿到来之 前必须稳定。

#include "stm32f4xx.h"
#include "delay.h"
#define I2C_GPIO GPIOA
#define I2C_CLK RCC_AHB1Periph_GPIOA
#define PIN_SCL GPIO_Pin_1
#define PIN_SDA GPIO_Pin_0
#define SDA_R GPIO_ReadInputDataBit(I2C_GPIO,PIN_SDA)
/*********************************************************************************************
* 名称:iic_init()
* 功能:I2C初始化函数
* 参数:无
* 返回:无
*********************************************************************************************/
void iic_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(I2C_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = PIN_SCL | PIN_SDA;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(I2C_GPIO, &GPIO_InitStructure);
}
/*********************************************************************************************
* 名称:sda_out()
* 功能:设置SDA为输出
* 参数:无
* 返回:无
*********************************************************************************************/
void sda_out(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = PIN_SDA;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(I2C_GPIO, &GPIO_InitStructure);
}
/*********************************************************************************************
* 名称:sda_in()
* 功能:设置SDA为输入
* 参数:无
* 返回:无
*********************************************************************************************/
void sda_in(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = PIN_SDA;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(I2C_GPIO, &GPIO_InitStructure);
}
/*********************************************************************************************
* 名称:iic_start()
* 功能:I2C起始信号
* 参数:无
* 返回:无
*********************************************************************************************/
void iic_start(void)
{
sda_out();
GPIO_SetBits(I2C_GPIO,PIN_SDA); //拉高数据线
GPIO_SetBits(I2C_GPIO,PIN_SCL); //拉高时钟线
delay_us(5); //延时
GPIO_ResetBits(I2C_GPIO,PIN_SDA); //产生下降沿
delay_us(5); //延时
GPIO_ResetBits(I2C_GPIO,PIN_SCL); //拉低时钟线
}
/*********************************************************************************************
* 名称:iic_stop()
* 功能:I2C停止信号
* 参数:无
* 返回:无
*********************************************************************************************/
void iic_stop(void)
{
sda_out();
GPIO_ResetBits(I2C_GPIO,PIN_SDA); //拉低数据线
GPIO_SetBits(I2C_GPIO,PIN_SCL); //拉高时钟线
delay_us(5); //延时5us
GPIO_SetBits(I2C_GPIO,PIN_SDA); //产生上升沿
delay_us(5); //延时5us
}
/*********************************************************************************************
* 名称:iic_send_ack()
* 功能:I2C发送应答
* 参数:ack -- 应答信号
* 返回:无
*********************************************************************************************/
void iic_send_ack(int ack)
{
sda_out();
if(ack)
GPIO_SetBits(I2C_GPIO,PIN_SDA); //写应答信号
else
GPIO_ResetBits(I2C_GPIO,PIN_SCL);
GPIO_SetBits(I2C_GPIO,PIN_SCL); //拉高时钟线
delay_us(5); //延时
GPIO_ResetBits(I2C_GPIO,PIN_SCL); //拉低时钟线
delay_us(5); //延时
}
/*********************************************************************************************
* 名称:iic_recv_ack()
* 功能:I2C接收应答
* 参数:无
* 返回:无
*********************************************************************************************/
int iic_recv_ack(void)
{
int CY = 0;
sda_in();
GPIO_SetBits(I2C_GPIO,PIN_SCL); //拉高时钟线
delay_us(5); //延时
CY = SDA_R; //读应答信号
GPIO_ResetBits(I2C_GPIO,PIN_SDA); //拉低时钟线
delay_us(5); //延时
return CY;
}
/*********************************************************************************************
* 名称:iic_write_byte()
* 功能:I2C写一个字节数据,返回ACK或者NACK,从高到低,依次发送
* 参数:data -- 要写的数据
* 返回:无
*********************************************************************************************/
unsigned char iic_write_byte(unsigned char data)
{
unsigned char i;
sda_out();
GPIO_ResetBits(I2C_GPIO,PIN_SCL); //拉低时钟线
for(i = 0;i < 8;i++){
if(data & 0x80){ //判断数据最高位是否为1
GPIO_SetBits(I2C_GPIO,PIN_SDA);
}
else
GPIO_ResetBits(I2C_GPIO,PIN_SDA);
delay_us(5); //延时5us
GPIO_SetBits(I2C_GPIO,PIN_SCL); //输出SDA稳定后,拉高SCL给出上升沿,从机检测到后进行数据采样
delay_us(5); //延时5us
GPIO_ResetBits(I2C_GPIO,PIN_SCL); //拉低时钟线
delay_us(5); //延时5us
data <<= 1; //数组左移一位
}
delay_us(5); //延时2us
sda_in();
GPIO_SetBits(I2C_GPIO,PIN_SDA); //拉高数据线
GPIO_SetBits(I2C_GPIO,PIN_SCL); //拉高时钟线
delay_us(5); //延时2us,等待从机应答
if(SDA_R){ //SDA为高,收到NACK
return 1;
}else{ //SDA为低,收到ACK
GPIO_ResetBits(I2C_GPIO,PIN_SCL); //释放总线
delay_us(5); //延时2us,等待从机应答
return 0;
}
}
/*********************************************************************************************
* 名称:iic_read_byte()
* 功能:I2C写一个字节数据,返回ACK或者NACK,从高到低,依次发送
* 参数:data -- 要写的数据
* 返回:无
*********************************************************************************************/
unsigned char iic_read_byte(unsigned char ack)
{
unsigned char i,data = 0;
sda_in();
GPIO_ResetBits(I2C_GPIO,PIN_SCL);
GPIO_SetBits(I2C_GPIO,PIN_SDA); //释放总线
for(i = 0;i < 8;i++){
GPIO_SetBits(I2C_GPIO,PIN_SCL); //给出上升沿
delay_us(30); //延时等待信号稳定
data <<= 1;
if(SDA_R){ //采样获取数据
data |= 0x01;
}else{
data &= 0xfe;
}
delay_us(10);
GPIO_ResetBits(I2C_GPIO,PIN_SCL); //下降沿,从机给出下一位值
delay_us(20);
}
sda_out();
if(ack)
GPIO_SetBits(I2C_GPIO,PIN_SDA); //应答状态
else
GPIO_ResetBits(I2C_GPIO,PIN_SDA);
delay_us(10);
GPIO_SetBits(I2C_GPIO,PIN_SCL);
delay_us(50);
GPIO_ResetBits(I2C_GPIO,PIN_SCL);
delay_us(50);
return data;
}
/*********************************************************************************************
* 名称:delay()
* 功能:延时
* 参数:t -- 设置时间
* 返回:无
*********************************************************************************************/
void delay(unsigned int t) //延时函数
{
unsigned char i;
while(t--){
for(i = 0;i < 200;i++);
}
}
3:SPI
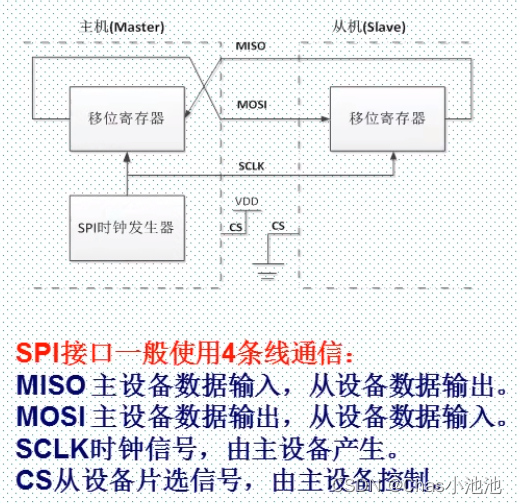
1.接口框图
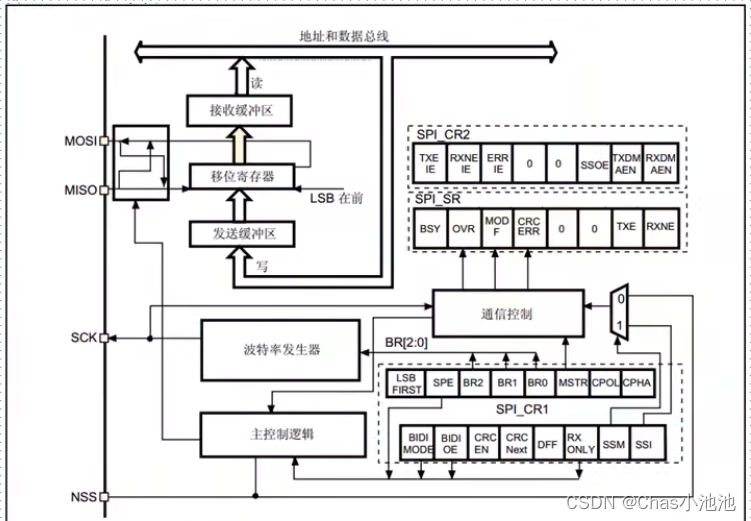
2.内部结构图
3.

4.工作原理
[1]硬件上为4根线。
[2]主机和从机都有一个串行移位寄存器, 主机通过 向它的SPI 串行寄存器写入一个字节来发起一次传输。
[3]串行移位寄存器通过MOSI信号线将字节传送给从机,从机 也将自己的串行移位寄存器中的内容通过MISO信号线返回 给主机。这样,两个移位寄存器中的内容就被交换。
[4]外设的写操作和读操作是同步完成的。如果只进行写操作, 主机只需忽略接收到的字节,反之,若主机要读取从机的一 个字节,就必须发送一一个空字节来引发从机的传输。
5.

#include "spi.h"
* 名称:SPI3_Init
* 功能:SPI3初始化,配置成主机模式
void SPI3_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
SPI_InitTypeDef SPI_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE); //使能GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_SPI3, ENABLE); //使能SPI3时钟
//GPIOB3,4,5初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;//PB3~5复用功能输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化
GPIO_PinAFConfig(GPIOB,GPIO_PinSource3,GPIO_AF_SPI3); //PB3复用为 SPI3
GPIO_PinAFConfig(GPIOB,GPIO_PinSource4,GPIO_AF_SPI3); //PB4复用为 SPI3
GPIO_PinAFConfig(GPIOB,GPIO_PinSource5,GPIO_AF_SPI3); //PB5复用为 SPI3
//这里只针对SPI口初始化
RCC_APB1PeriphResetCmd(RCC_APB1Periph_SPI3,ENABLE); //复位SPI3
RCC_APB1PeriphResetCmd(RCC_APB1Periph_SPI3,DISABLE); //停止复位SPI3
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex; //设置SPI单向或者双向的数据模式:SPI设置为双线双向全双工
SPI_InitStructure.SPI_Mode = SPI_Mode_Master; //设置SPI工作模式:设置为主SPI
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b; //设置SPI的数据大小:SPI发送接收8位帧结构
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High; //串行同步时钟的空闲状态为高电平
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; //串行同步时钟的第二个跳变沿(上升或下降)数据被采样
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft; //NSS信号由硬件(NSS管脚)还是软件(使用SSI位)管理:内部NSS信号有SSI位控制
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_256; //定义波特率预分频的值:波特率预分频值为256
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB; //指定数据传输从MSB位还是LSB位开始:数据传输从MSB位开始
SPI_InitStructure.SPI_CRCPolynomial = 7; //CRC值计算的多项式
SPI_Init(SPI3, &SPI_InitStructure); //根据SPI_InitStruct中指定的参数初始化外设SPIx寄存器
SPI_Cmd(SPI3, ENABLE); //使能SPI外设
SPI3_ReadWriteByte(0xff); //启动传输
}
/*********************************************************************************************
* 名称:SPI3_SetSpeed(u8 SPI_BaudRatePrescaler)
* 功能:SPI3速度设置函数
* 参数:SPI_BaudRatePrescaler
* 返回:
* 修改:
* 注释:SPI速度=fAPB2/分频系数
SPI_BaudRate_Prescaler:SPI_BaudRatePrescaler_2~SPI_BaudRatePrescaler_256
fAPB2时钟一般为84Mhz
*********************************************************************************************/
void SPI3_SetSpeed(u8 SPI_BaudRatePrescaler)
{
assert_param(IS_SPI_BAUDRATE_PRESCALER(SPI_BaudRatePrescaler));//判断有效性
SPI3->CR1&=0XFFC7; //位3-5清零,用来设置波特率
SPI3->CR1|=SPI_BaudRatePrescaler; //设置SPI1速度
SPI_Cmd(SPI2,ENABLE); //使能SPI1
}
/*********************************************************************************************
* 名称:SPI3_ReadWriteByte(u8 TxData)
* 功能:SPI3 读写一个字节
* 参数:TxData:要写入的字节
* 返回:读取到的字节
* 修改:
* 注释:
*********************************************************************************************/
u8 SPI3_ReadWriteByte(u8 TxData)
{
while (SPI_I2S_GetFlagStatus(SPI3, SPI_I2S_FLAG_TXE) == RESET){}//等待发送区空
SPI_I2S_SendData(SPI3, TxData); //通过外设SPIx发送一个byte 数据
while (SPI_I2S_GetFlagStatus(SPI3, SPI_I2S_FLAG_RXNE) == RESET){} //等待接收完一个byte
return SPI_I2S_ReceiveData(SPI3); //返回通过SPIx最近接收的数据
}














 2983
2983











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









