






在我设计自主导航系统时:大抵是这样的实现思路:
-
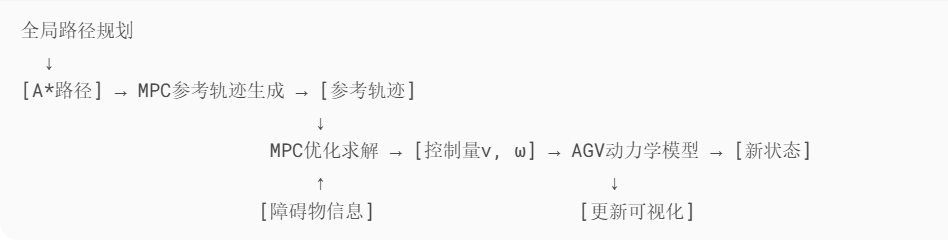
全局路径规划(A*算法获取最短路径)
-
局部运动控制(未来预测模型MPC优化局部运动路径)
-
动态避障与仿真(借用python中的Matplotlib库做可视化仿真
先放出我完整的,很大瑕疵的仿真代码:
虽然从实现思路来讲,仿真是最外层的东西,但实际第一步要考虑的是地图和静动态障碍物设计;
所以有了:(1)创建一个空的零矩阵栅格地图(20*20)和静态障碍物
(2)从我们规划的AStarPlanner类里初始化参数
(3)path是我们得到的全局路径列表
def simulate():
# 创建地图 (20x20网格,1=障碍物)
grid = np.zeros((20, 20))
grid[5:15, 10] = 1 # 设置垂直障碍墙
# A*路径规划
planner = AStarPlanner(grid)
path = planner.plan((1, 1), (18, 18)) # 起点(1,1)到终点(18,18)随后调用仿真函数
for step in range(100):
# 更新动态障碍物位置
obstacles[0][0] += 0.05 if step < 50 else -0.05
# MPC求解控制量
u = mpc.solve(x, path, obstacles)
# 更新AGV状态
x[0] += u[0] * np.cos(x[2]) * mpc.dt
x[1] += u[0] * np.sin(x[2]) * mpc.dt
x[2] += u[1] * mpc.dt
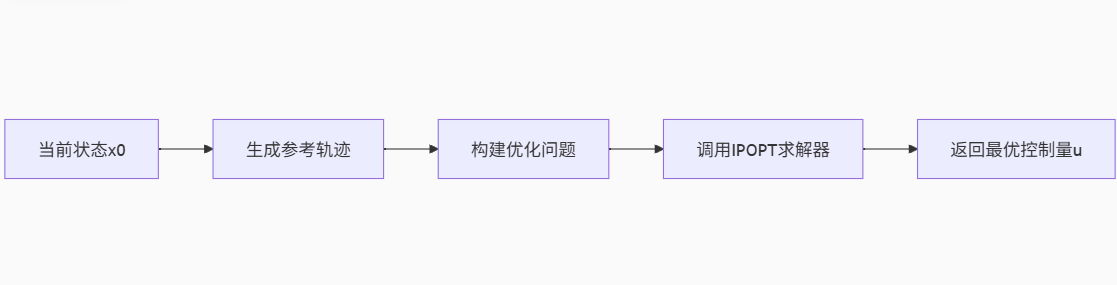
在mpc.solve函数中:处理逻辑如下:
-
参考轨迹生成
-
在全局路径中找到离当前状态最近的点
-
提取未来
N+1个点作为参考轨迹 -
为每个点计算期望朝向角(让AGV看向下一个目标)
-
简单避障处理:如果参考点靠近障碍物,调整朝向角
-
-
优化求解
-
将当前状态
x0和参考轨迹X_ref输入预定义的CasADi模型 -
考虑控制约束(速度
v和角速度ω的范围) -
求解得到未来
N步的最优控制序列
-
其中:CasADi作为一个非线性优化运算处理库也被detect在MPC类中
主要数据传输如:
import numpy as np
import matplotlib.pyplot as plt
import casadi as ca
from scipy.spatial.distance import cdist
# ================== A* 路径规划 ==================
class AStarPlanner:
def __init__(self, grid):
self.grid = grid # 2D地图 (0=空闲, 1=障碍物)
self.rows, self.cols = grid.shape
def plan(self, start, goal):
open_set = {start}
came_from = {}
g_score = {start: 0}
f_score = {start: self._heuristic(start, goal)}
while open_set:
current = min(open_set, key=lambda x: f_score[x])
if current == goal:
return self._reconstruct_path(came_from, current)
open_set.remove(current)
for neighbor in self._get_neighbors(current):
tentative_g = g_score[current] + 1
if neighbor not in g_score or tentative_g < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g
f_score[neighbor] = tentative_g + self._heuristic(neighbor, goal)
if neighbor not in open_set:
open_set.add(neighbor)
return [] # 无路径
def _heuristic(self, a, b):
return np.linalg.norm(np.array(a) - np.array(b))
def _get_neighbors(self, pos):
neighbors = []
for dx, dy in [(-1,0),(1,0),(0,-1),(0,1),(-1,-1),(-1,1),(1,-1),(1,1)]: # 8-邻域
x, y = pos[0]+dx, pos[1]+dy
if 0<=x<self.rows and 0<=y<self.cols and self.grid[x,y]==0:
neighbors.append((x,y))
return neighbors
def _reconstruct_path(self, came_from, current):
path = [current]
while current in came_from:
current = came_from[current]
path.append(current)
return path[::-1]
# ================== 改进的MPC控制器 ==================
class MPCController:
def __init__(self):
# AGV动力学参数 (状态: x,y,θ; 控制: v,ω)
self.dt = 0.1
self.N = 15 # 预测时域
self.n_states = 3 # 状态维度
self.n_controls = 2 # 控制维度
# 权重矩阵 (Q: 状态误差, R: 控制量, F: 终端误差)
self.Q = np.diag([100, 100, 50])
self.R = np.diag([50, 5])
self.F = np.diag([200, 200, 100])
# 控制约束
self.v_bounds = (0, 2.0) # 线速度范围
self.omega_bounds = (-1.0, 1.0) # 角速度范围
# 初始化优化问题
self._setup_optimizer()
self.obstacle_weight = 100 # 避障权重
def _setup_optimizer(self):
# 定义CasADi优化变量
self.U = ca.SX.sym('U', self.N * self.n_controls)
self.X_ref = ca.SX.sym('X_ref', (self.N+1)*self.n_states)
self.x0 = ca.SX.sym('x0', self.n_states)
# 构建预测模型
x_pred = self.x0
cost = 0
g = [] # 约束容器
for i in range(self.N):
# 当前控制量
u = self.U[i*self.n_controls : (i+1)*self.n_controls]
# 动力学模型 (差速驱动模型)
x_next = ca.vertcat(
x_pred[0] + u[0]*ca.cos(x_pred[2])*self.dt,
x_pred[1] + u[0]*ca.sin(x_pred[2])*self.dt,
x_pred[2] + u[1]*self.dt
)
# 代价函数
x_err = x_pred - self.X_ref[i*self.n_states:(i+1)*self.n_states]
cost += ca.mtimes([x_err.T, self.Q, x_err])
cost += ca.mtimes([u.T, self.R, u])
# 状态传递
x_pred = x_next
# 控制量约束
g.append(u[0]) # v
g.append(u[1]) # ω
# 终端代价
x_err = x_pred - self.X_ref[-self.n_states:]
cost += ca.mtimes([x_err.T, self.F, x_err])
# 优化问题设置
nlp = {'x': self.U, 'f': cost, 'g': ca.vertcat(*g), 'p': ca.vertcat(self.x0, self.X_ref)}
opts = {'ipopt.print_level': 0, 'print_time': 0}
self.solver = ca.nlpsol('solver', 'ipopt', nlp, opts)
def solve(self, x0, path_ref, obstacles=None):
# 生成参考轨迹 (前瞻点)
ref_traj = self._generate_reference(x0, path_ref, obstacles)
X_ref = ref_traj.flatten()
# 优化参数
p = np.concatenate([x0, X_ref])
# 约束上下界
lbg = [self.v_bounds[0], self.omega_bounds[0]] * self.N
ubg = [self.v_bounds[1], self.omega_bounds[1]] * self.N
# 求解MPC问题
res = self.solver(p=p, lbg=lbg, ubg=ubg)
u_opt = res['x'].full().flatten()
return u_opt[:self.n_controls] # 返回第一步控制
def _generate_reference(self, x0, path_ref, obstacles):
# 从全局路径中找到最近点
if len(path_ref) == 0:
return np.tile(x0, (self.N+1, 1))
distances = cdist([x0[:2]], path_ref)
closest_idx = np.argmin(distances)
# 提取前瞻点
ref_traj = []
for i in range(self.N+1):
idx = min(closest_idx + i, len(path_ref)-1)
target = path_ref[idx]
# 计算期望朝向角
if i < self.N and idx+1 < len(path_ref):
next_target = path_ref[idx+1]
theta_ref = np.arctan2(next_target[1]-target[1], next_target[0]-target[0])
else:
theta_ref = x0[2] # 保持当前朝向
# 避障惩罚 (简单基于障碍物的距离进行惩罚)
for obs in obstacles:
dist = np.linalg.norm(np.array([target[0], target[1]]) - np.array([obs[0], obs[1]]))
if dist < obs[2]:
# 增加避障惩罚项
theta_ref += np.pi / 4 # 示例:避障方向调整
ref_traj.append([target[0], target[1], theta_ref])
return np.array(ref_traj)
# ================== 主仿真循环 ==================
def simulate():
# 创建地图 (1=障碍物)
grid = np.zeros((20, 20))
grid[5:15, 10] = 1 # 静态障碍物 (墙)
# A* 规划全局路径
planner = AStarPlanner(grid)
path = planner.plan((1, 1), (18, 18))
if not path:
print("A* 无法找到路径!")
return
# 初始化MPC控制器
mpc = MPCController()
# 动态障碍物 [x, y, 半径]
obstacles = [[15, 15, 1.5]]
# AGV初始状态 [x, y, theta]
x = np.array([1.0, 1.0, 0.0])
# 存储轨迹用于可视化
trajectory = [x.copy()]
# 可视化初始化
plt.figure(figsize=(10, 8))
for step in range(100):
# 更新动态障碍物 (示例:周期性移动)
obstacles[0][0] += 0.05 if step < 50 else -0.05
# MPC控制
u = mpc.solve(x, path, obstacles)
# 状态更新 (前向欧拉积分)
x[0] += u[0] * np.cos(x[2]) * mpc.dt
x[1] += u[0] * np.sin(x[2]) * mpc.dt
x[2] += u[1] * mpc.dt
trajectory.append(x.copy())
# 可视化
plt.clf()
plt.imshow(grid.T, origin='lower', cmap='Greys', alpha=0.3)
# 绘制路径和轨迹
path_array = np.array(path)
plt.plot(path_array[:,0], path_array[:,1], 'g--', label='全局路径')
traj_array = np.array(trajectory)
plt.plot(traj_array[:,0], traj_array[:,1], 'b-', label='AGV轨迹')
plt.plot(x[0], x[1], 'bo', markersize=8, label='AGV当前位置')
# 绘制障碍物
for obs in obstacles:
circle = plt.Circle((obs[0], obs[1]), obs[2], color='r', alpha=0.3)
plt.gca().add_patch(circle)
plt.legend()
plt.xlim(0, 20)
plt.ylim(0, 20)
plt.title(f'Step: {step}, 控制量: v={u[0]:.2f}, ω={u[1]:.2f}')
plt.pause(0.05)
# 检查是否到达目标
if np.linalg.norm(x[:2] - path[-1]) < 0.5:
print("到达目标!")
break
plt.show()
if __name__ == "__main__":
simulate()
到此,一个工程文件的仿真初步架构结束;
接下来我们分析仿真问题
仿真结果如图:
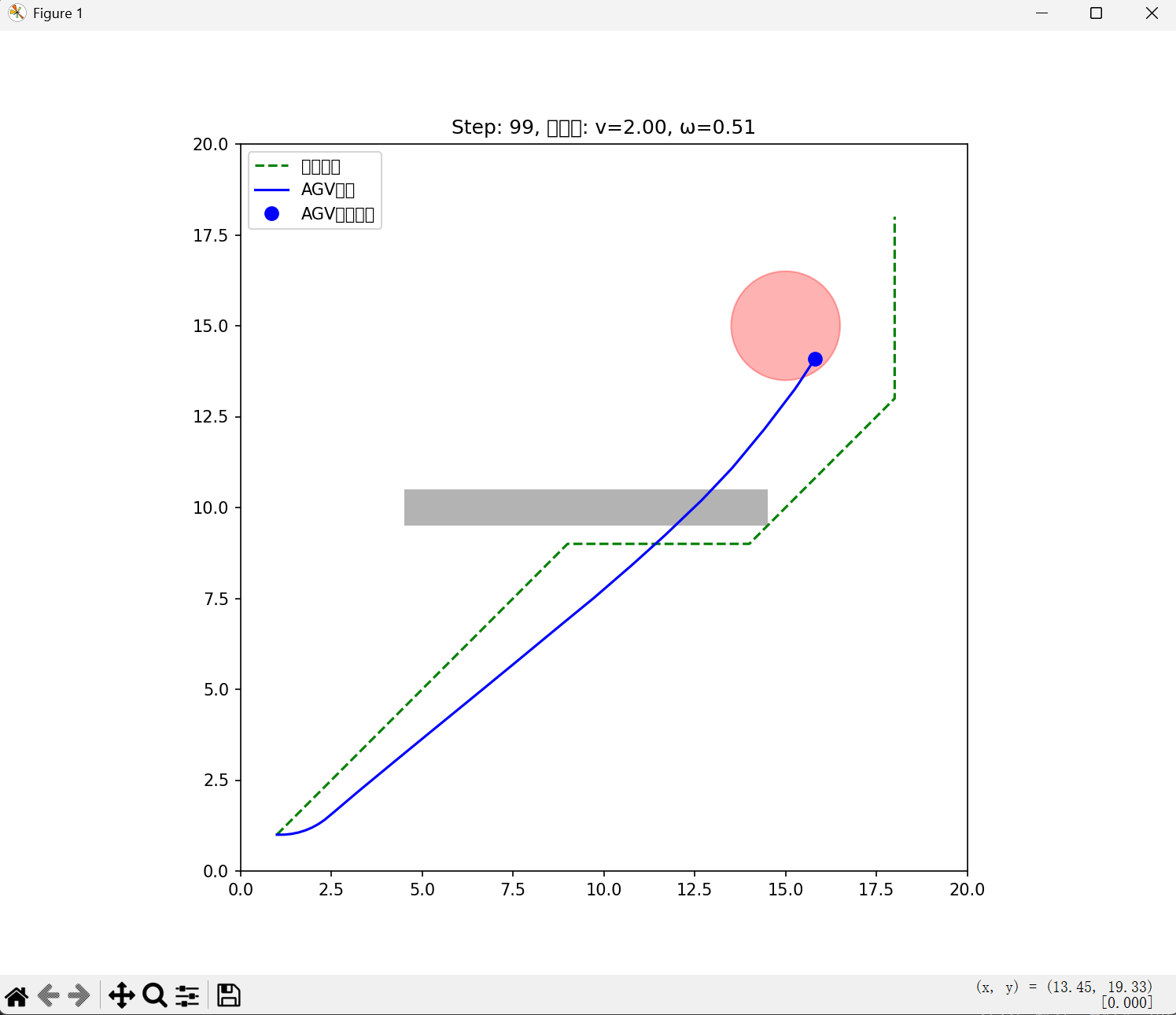
显然:在Actual-path中,无视掉了障碍物
这是一个综合性的问题:它来自
1 主优化器没有接入正确格式的path数据/没有写入
2 MPC和A*对path的权重影响不同:我们可以清楚看到,在全局最优路径正确反映出来的前提下:由于MPC的局部处理高权重影响,它忽略了全局路径和障碍物惩罚
3 障碍物惩罚权重仍然不够:在程序中
self.obstacle_weight = 100 # 避障权
# 避障惩罚
for obs in obstacles:
dist = np.linalg.norm(np.array([target[0], target[1]]) - np.array([obs[0], obs[1]]))
if dist < obs[2]:
# 增加避障惩罚项
theta_ref += np.pi / 4 # 示例:避障方向调整
ref_traj.append([target[0], target[1], theta_ref])这个障碍惩罚显然有些轻薄,我们要更换更严厉的惩罚权重:比如:
obs_weight = k(a+ 1/dist[0.1])(分母常数项)
或者指数爆炸型:
cost += self.obstacle_weight * ca.fmax(h, 0)**2
优化结果:
到这里为止,可以发现最大的问题:
障碍物和处理后的路径显然没有写入主优化器
(以下建议来自chatgpt-4o)

随即附上更新后的完整code:
import numpy as np
import matplotlib.pyplot as plt
import casadi as ca
from scipy.spatial.distance import cdist
# ================== A* 路径规划 ==================
class AStarPlanner:
def __init__(self, grid):
self.grid = grid
self.rows, self.cols = grid.shape
def plan(self, start, goal):
open_set = {start}
came_from = {}
g_score = {start: 0}
f_score = {start: self._heuristic(start, goal)}
while open_set:
current = min(open_set, key=lambda x: f_score[x])
if current == goal:
return self._reconstruct_path(came_from, current)
open_set.remove(current)
for nbr in self._get_neighbors(current):
tentative = g_score[current] + 1
if nbr not in g_score or tentative < g_score[nbr]:
came_from[nbr] = current
g_score[nbr] = tentative
f_score[nbr] = tentative + self._heuristic(nbr, goal)
open_set.add(nbr)
return []
def _heuristic(self, a, b):
return np.linalg.norm(np.array(a) - np.array(b))
def _get_neighbors(self, pos):
nbrs = []
for dx, dy in [(-1,0),(1,0),(0,-1),(0,1),(-1,-1),(-1,1),(1,-1),(1,1)]:
x, y = pos[0]+dx, pos[1]+dy
if 0<=x<self.rows and 0<=y<self.cols and self.grid[x,y]==0:
nbrs.append((x,y))
return nbrs
def _reconstruct_path(self, came_from, curr):
path = [curr]
while curr in came_from:
curr = came_from[curr]
path.append(curr)
return path[::-1]
# ================== 改进的 MPC 控制器 ==================
class MPCController:
def __init__(self, obstacles):
# ----- 基本参数 -----
self.dt = 0.1
self.N = 15
self.n_states = 3 # x, y, θ
self.n_controls = 2 # v, ω
# ----- 权重 -----
self.Q = np.diag([50, 50, 20])
self.R = np.diag([50, 5])
self.F = np.diag([200, 200, 100])
self.obstacle_weight = 1e4 # W_obs,大幅增大“撞墙成本”
# 每个元素 [ox, oy, radius]
self.obstacles = np.array(obstacles)
self.n_obs = self.obstacles.shape[0]
self.v_bounds = (0.0, 2.0)
self.omega_bounds = (-1.0, 1.0)
# 构建 CasADi 优化器
self._setup_optimizer()
def _setup_optimizer(self):
# 决策变量 U
self.U = ca.SX.sym('U', self.N*self.n_controls)
# 参考轨迹 (x_ref, y_ref, θ_ref), 展平
self.X_ref = ca.SX.sym('X_ref', (self.N+1)*3)
# 初始状态
self.x0 = ca.SX.sym('x0', 3)
# 障碍物参数: [ox1,oy1,r1, ox2,oy2,r2, ...]
self.obs_p = ca.SX.sym('obs_p', 3*self.n_obs)
cost = 0
g_list = []
x_pred = self.x0
# 逐步构造 cost & 约束
for i in range(self.N):
# current control
u = self.U[2*i:2*i+2]
# dynamics
x_next = ca.vertcat(
x_pred[0] + u[0]*ca.cos(x_pred[2])*self.dt,
x_pred[1] + u[0]*ca.sin(x_pred[2])*self.dt,
x_pred[2] + u[1]*self.dt
)
# 路径跟踪误差
idx = 3*i
x_err = x_pred - self.X_ref[idx:idx+3]
cost += ca.mtimes([x_err.T, self.Q, x_err])
# 控制量平滑
cost += ca.mtimes([u.T, self.R, u])
# ----- 直接对预测状态做障碍物二次惩罚 -----
margin = 0.5
for j in range(self.n_obs):
ox = self.obs_p[3*j]
oy = self.obs_p[3*j+1]
r = self.obs_p[3*j+2]
dx = x_pred[0] - ox
dy = x_pred[1] - oy
dist_pred = ca.sqrt(dx*dx + dy*dy)
h = (r + margin) - dist_pred
cost += self.obstacle_weight * ca.fmax(h, 0)**2
x_pred = x_next
g_list += [u[0], u[1]]
# 终端误差
idx_end = 3*self.N
x_err_end = x_pred - self.X_ref[idx_end:idx_end+3]
cost += ca.mtimes([x_err_end.T, self.F, x_err_end])
# NLP 设定
g_cat = ca.vertcat(*g_list)
p = ca.vertcat(self.x0, self.X_ref, self.obs_p)
nlp = {'x': self.U, 'f': cost, 'g': g_cat, 'p': p}
opts = {'ipopt.print_level':0, 'print_time':0}
self.solver = ca.nlpsol('solver', 'ipopt', nlp, opts)
def solve(self, x0, path_ref):
ref = self._generate_reference(x0, path_ref)
obs_arr = np.array(self.obstacles) # ← 转成 ndarray
p_vec = np.concatenate([
x0,
ref.flatten(),
obs_arr.flatten()
])
lbg = [self.v_bounds[0], self.omega_bounds[0]]*self.N
ubg = [self.v_bounds[1], self.omega_bounds[1]]*self.N
sol = self.solver(p=p_vec, lbg=lbg, ubg=ubg)
u_opt = sol['x'].full().flatten()
return u_opt[:2]
def _generate_reference(self, x0, path_ref):
if not path_ref:
return np.tile(x0, (self.N+1,1))
dists = cdist([x0[:2]], path_ref)
idx0 = np.argmin(dists)
traj = []
for i in range(self.N+1):
idx = min(idx0+i, len(path_ref)-1)
tx, ty = path_ref[idx]
# 计算朝向
if idx < len(path_ref)-1:
nx, ny = path_ref[idx+1]
th = np.arctan2(ny-ty, nx-tx)
else:
th = x0[2]
traj.append([tx, ty, th])
return np.array(traj)
# ================== 主仿真循环 ==================
def simulate():
grid = np.zeros((20,20))
grid[5:15,10] = 1
planner = AStarPlanner(grid)
path = planner.plan((1,1), (18,18))
if not path:
print("A* 无解")
return
static_cells = np.argwhere(grid==1)
static_obs = []
for row, col in static_cells:
# 直接把 row→y, col→x
static_obs.append([ row+0.5,col+0.5, 0.7])
dynamic_obs = [[15, 15, 1.5]]
obstacles = static_obs + dynamic_obs
mpc = MPCController(obstacles)
x = np.array([1.0,1.0,0.0])
traj = [x.copy()]
plt.figure(figsize=(8,8))
for step in range(100):
dynamic_obs[0][0] += 0.05 if step<50 else -0.05
mpc.obstacles = static_obs + dynamic_obs
# 求 MPC 控制
u = mpc.solve(x, path)
# 状态更新
x = x + np.array([
u[0]*np.cos(x[2])*mpc.dt,
u[0]*np.sin(x[2])*mpc.dt,
u[1]*mpc.dt
])
traj.append(x.copy())
plt.clf()
plt.imshow(grid.T, origin='lower', cmap='Greys', alpha=0.3)
path_arr = np.array(path)
plt.plot(path_arr[:,0], path_arr[:,1], 'g--', label='A*路径')
tr = np.array(traj)
plt.plot(tr[:,0], tr[:,1], 'b-', label='AGV轨迹')
for ox, oy, r in mpc.obstacles:
plt.gca().add_patch(plt.Circle((ox,oy), r, color='r', alpha=0.3))
plt.legend(); plt.xlim(0,20); plt.ylim(0,20)
plt.pause(0.05)
if np.linalg.norm(x[:2]-path[-1])<0.5:
print("到达目标")
break
plt.show()
if __name__ == "__main__":
simulate()
# ================== 主仿真循环 ==================
def simulate():
# 地图
grid = np.zeros((20,20))
grid[5:15,10] = 1
# A*
planner = AStarPlanner(grid)
path = planner.plan((1,1),(18,18))
if not path:
print("A* 无解"); return
# MPC
mpc = MPCController()
obstacles = [[15,15,1.5]]
x = np.array([1.0,1.0,0.0])
traj = [x.copy()]
plt.figure(figsize=(8,8))
for step in range(100):
# 动态障碍
obstacles[0][0] += 0.05 if step<50 else -0.05
# 求 MPC 控制
u = mpc.solve(x, path, obstacles)
# 前向欧拉
x = x + np.array([
u[0]*np.cos(x[2])*mpc.dt,
u[0]*np.sin(x[2])*mpc.dt,
u[1]*mpc.dt
])
traj.append(x.copy())
plt.clf()
plt.imshow(grid.T,origin='lower',cmap='Greys',alpha=0.3)
path_arr = np.array(path)
plt.plot(path_arr[:,0], path_arr[:,1],'g--',label='A*路径')
ta = np.array(traj)
plt.plot(ta[:,0], ta[:,1],'b-',label='AGV轨迹')
for ox,oy,r in obstacles:
circle = plt.Circle((ox,oy),r,color='r',alpha=0.3)
plt.gca().add_patch(circle)
plt.legend(); plt.xlim(0,20); plt.ylim(0,20)
plt.pause(0.05)
if np.linalg.norm(x[:2]-path[-1])<0.5:
print("到达目标"); break
plt.show()
if __name__ == "__main__":
simulate()
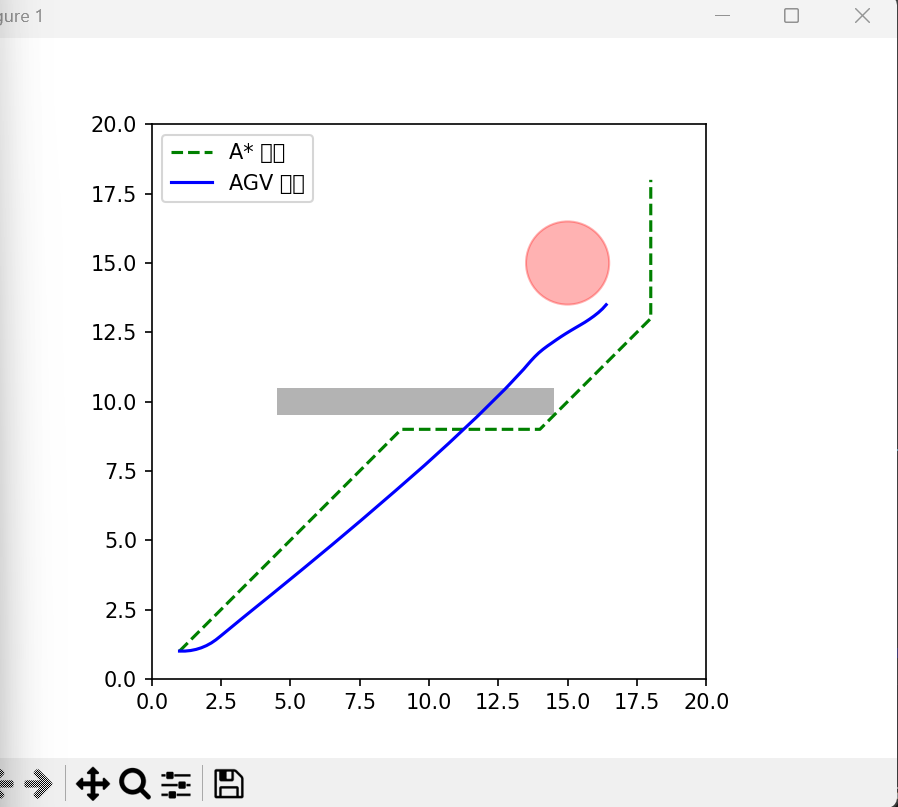
仿真结果如图:
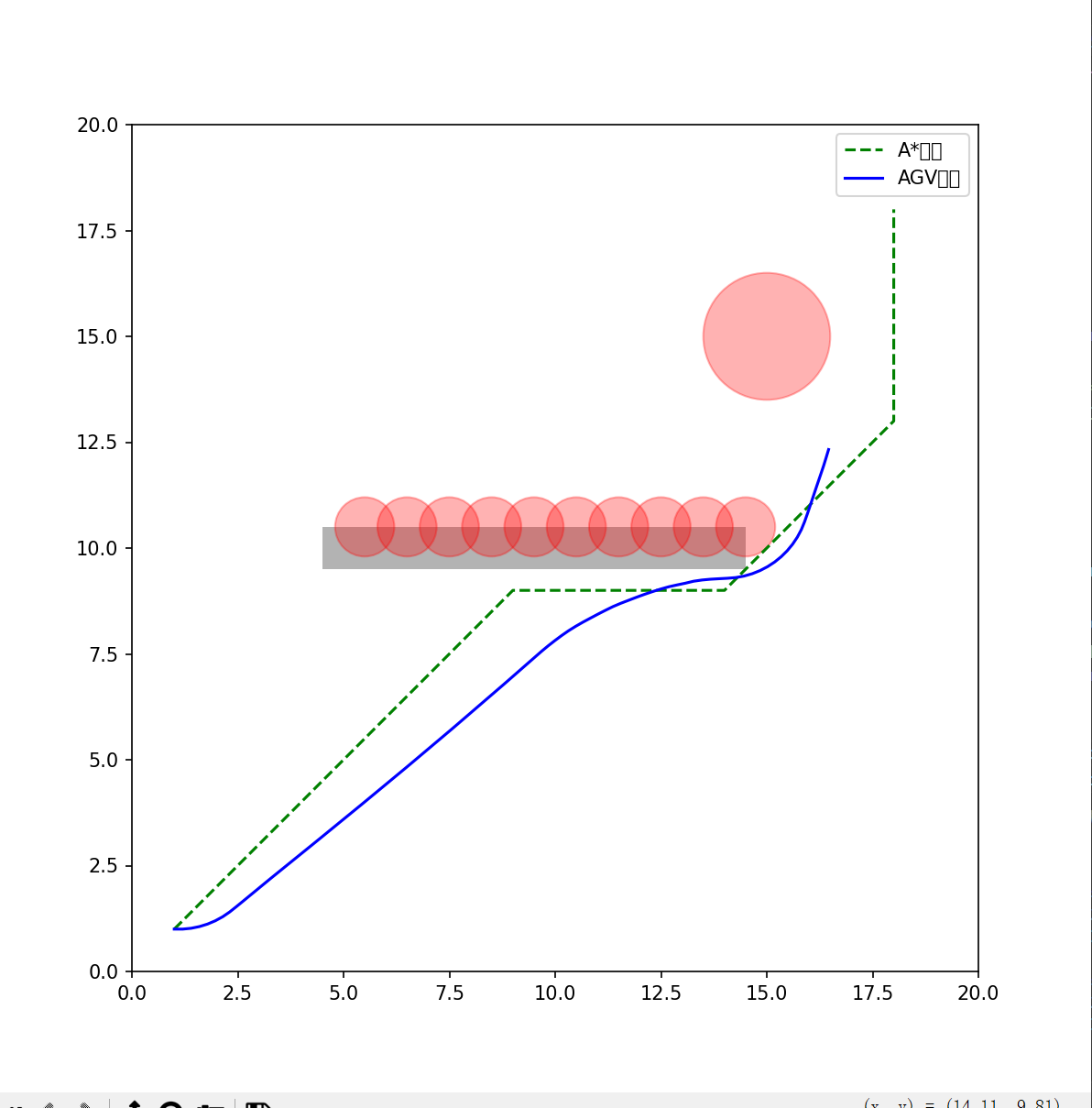
至此:一个可以用的混合A*+MPC综合控制避障仿真结束;
下一篇我会专门就中间迭代版本差异做分享学习,并尝试混合A*和CBF算法加强介入

















 4931
4931

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









