









在机器人学中,逆运动学(Inverse Kinematics, IK) 是研究如何让机器人从已知的末端执行器位置推导出关节变量的一种方法。相比于正运动学(Forward Kinematics, FK),它的求解更为复杂,因为同一个末端位置可能对应多个关节角度,甚至在某些情况下无解。因此,逆运动学在机器人控制和规划中起着核心作用。
1.逆运动学基本介绍
1.1 逆运动学的定义
在机器人学中,正运动学(Forward Kinematics, FK) 计算的是已知关节变量(如关节角度或关节位移)时,机械臂末端执行器的位置和方向。而逆运动学(Inverse Kinematics, IK) 解决的是已知目标末端位姿(位置 + 方向)时,如何求解出各个关节变量的问题。
简单来说:
- 正运动学(FK):输入关节角度 → 输出末端位置
- 逆运动学(IK):输入末端位置 → 输出关节角度
在很多实际应用中,机械臂的任务往往是到达某个目标点,但机器人控制系统本身并不知道如何调整关节角度。因此,逆运动学是实现机器人运动控制的核心。
1.2 逆运动学的应用场景
逆运动学广泛应用于以下场景:
- 工业自动化:机械臂在生产线上执行焊接、装配、喷涂等任务,需要根据目标工件位置调整关节角度。
- 医疗手术机器人:手术机械臂执行精准操作,医生给定目标点,系统自动求解关节角度。
- 3D 动画与游戏:角色动画中,逆运动学用于调整角色四肢,使动作更加自然。
- 自动驾驶车辆:用于控制多自由度的传感器臂或机械臂,如自动驾驶汽车的激光雷达扫描系统。
- 航天与深海探索:机器人机械臂执行复杂任务,如国际空间站的机械臂操作卫星、深海采样等。
1.3逆运动学求解的特点与难点
较于正运动学,逆运动学具有以下挑战:
-
多解性(Multiple Solutions)
- 机械臂的末端可以通过多种关节角度组合到达同一点。
- 例如,人类手臂可以通过两种不同的弯曲方式(肘上、肘下)拿起一个物体。
-
无解情况(No Solution)
- 若目标点超出了机械臂的工作范围,则没有解。
- 例如,UR5 机械臂无法触及离基座 5 米远的目标点,因为其臂长有限。
-
奇异点(Singularity)
- 当机械臂处于某些特定位置(如多个关节共线)时,自由度减少,导致控制困难。
- 例如,UR5 机械臂的某些姿态下可能无法沿某个方向自由旋转。
-
计算复杂性(Computational Complexity)
- 解析求解(Analytical Method)只适用于特定结构的机器人。
- 数值求解(Numerical Method)需要迭代优化,可能收敛到局部解或收敛缓慢。
2.逆运动学求解方法
逆运动学的求解方法主要包括 解析法(Analytical Method)、数值法(Numerical Method)、几何法(Geometric Method)。不同的方法各有优缺点,适用于不同类型的机械臂和应用场景。
2.1解析法
解析法是一种基于数学推导的求解方法,通过几何关系、代数运算,直接求解出机械臂的关节变量(角度或位移)。解析法适用于特定结构的机器人,如 6-DOF(六自由度)机械臂,其中关节之间的关系可以通过封闭形式的数学方程求解。
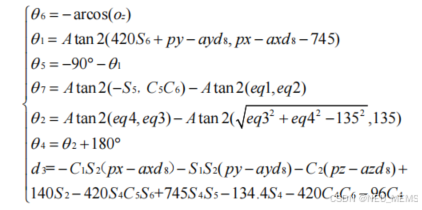
图1 数值法求逆运动学解部分方程
步骤
-
建立运动学方
-
分解齐次变换矩
-
求解方
-
选择适当的解
优点
✅ 计算速度快:解析法直接得出闭式解,无需迭代计算。
✅ 结果精确:由于没有数值逼近误差,求解结果是数学上的精确解。
✅ 适用于某些特定机械臂(如 6 轴工业机器人)。
缺点
❌ 适用性有限:只有结构规则的机器人(如 6-DOF 串联机械臂)可以使用解析法。
❌ 推导复杂:机械臂自由度增多或结构复杂时,解析法的推导过程会变得非常繁琐甚至无法求解。
2.2 数值法
基本原理
数值法基于优化迭代,通过不断调整关节角度,使机械臂的末端尽可能接近目标点。数值方法不需要解析求解运动学方程,因此适用于任意机械臂结构。
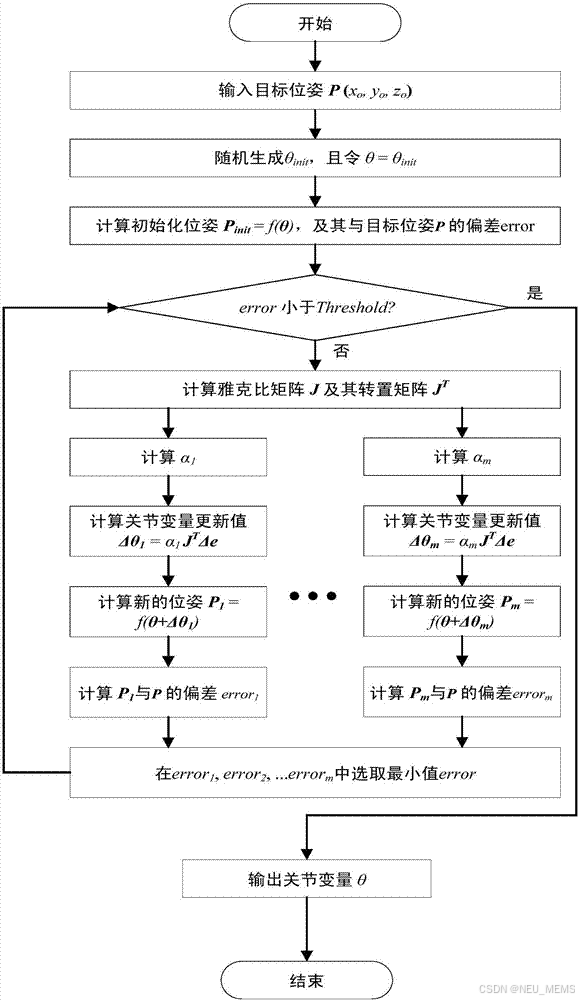
图2 数值法求逆运动学解
数值法的核心思想是最小化误差函数,即:
其中:
是正运动学方程,
是目标位姿,
- 误差是末端到目标位姿的偏差。
步骤
- 初始化关节角度
- 计算误差
- 使用特定方法求解关节调整量
- 更新关节角度
- 重复迭代
优点
✅ 适用于任意机械臂,无论关节数目或结构如何,都可以用数值法求解。
✅ 可以处理冗余自由度,如 7 轴机械臂(KUKA iiwa)。
✅ 可结合优化方法,求解更符合约束条件的解。
缺点
❌ 计算速度较慢,需要多次迭代,可能会收敛缓慢。
❌ 可能收敛到局部解,无法保证一定找到全局最优解。
❌ 可能存在奇异性问题,某些情况下雅可比矩阵可能不可逆,导致求解失败。
2.3 几何法
基本原理
几何法基于机械臂的几何关系,通过三角函数、向量运算来求解关节角度。它特别适用于低自由度(如 2-3 轴)机械臂的求解,能够提供直观的物理意义。
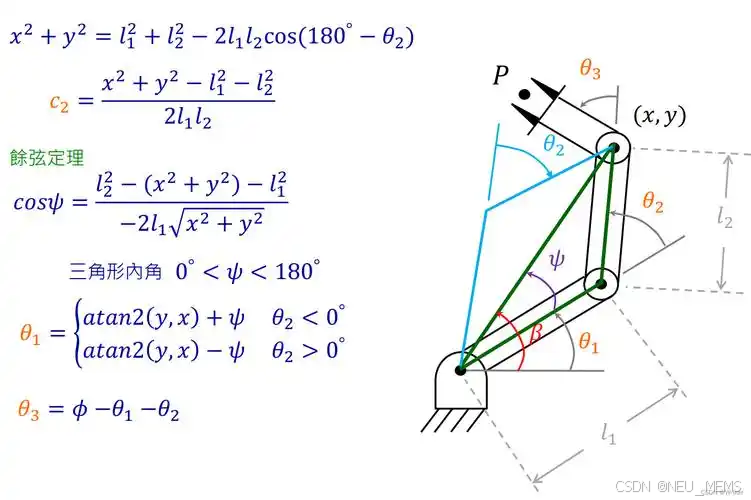
图3 几何法求逆运动学解
步骤
- 建立几何关系
- 使用三角函数或向量分析
- 求解每个关节的角度
- 综合多个关节的解
优点
✅ 计算速度快,适用于实时控制。
✅ 几何直观,方便理解和可视化。
✅ 适用于 2D 机械臂或平面运动机器人。
缺点
❌ 适用性有限,对于 6 轴或更复杂的机器人不适用。
❌ 自由度增加后,求解变得困难。
2.4 智能优化方法
除了传统的解析法、数值法和几何法,近年来基于智能优化和机器学习的方法也逐渐应用于逆运动学求解,特别是在高自由度、冗余机械臂的情况下,这些方法能够提供更加灵活和高效的解。
(1) 元启发式优化算法
元启发式算法(Metaheuristic Optimization)是一类基于搜索和优化的全局方法,适用于复杂的逆运动学求解问题。例如:
- 遗传算法(GA):模拟自然选择机制,迭代优化关节角度。
- 粒子群优化(PSO):模拟群体智能行为,如鸟群觅食,快速找到合适的逆解。
- 模拟退火(SA):基于物理退火过程,逐步优化到最优解。
这些方法虽然计算量较大,但可以有效避免局部最优解,适用于冗余机械臂、避障路径规划等场景。
(2) 机器学习与深度神经网络
深度学习方法,如神经网络(NN),可以通过大规模数据训练,让模型学习逆运动学映射关系:
训练完成后,神经网络可以在毫秒级求解逆运动学,适用于实时控制、机器人自主学习等应用。
3.Robotics Toolbox 求解逆运动学
在 MATLAB 中,我们可以使用 Robotics Toolbox 进行机械臂的逆运动学求解。本节将详细介绍 求解逆运动学的具体代码,并对每个部分进行详细的解析。
3.1 ikine()逆运动学求解的基本语法
在 MATLAB 的 Robotics Toolbox 中, ikine()是用于求解数值逆运动学的关键函数。它适用于复杂结构机械臂,特别是无解析解或冗余自由度的机械臂。将深入解析 ikine()的用法、参数设置以及求解策略。
函数的基本语法如下
q = robot.ikine(T)
q = robot.ikine(T, q0)
q = robot.ikine(T, q0, options)
其中:
robot:使用 SerialLink 创建的机械臂对象。T:目标末端位姿(4×4 齐次变换矩阵)。q0(可选):初始关节角度(默认全 0)。options(可选):求解时的控制参数,如mask、tol、ilimit等。
3.2 ikine()主要参数详解
1. mask 参数
mask设定哪些 DOF(自由度)参与逆运动学计算。- 其值是一个 1×6 向量,分别对应:
1:该自由度需要考虑。0:忽略该自由度(相当于设为任意值)。
示例:
q = robot.ikine(T, 'mask', [1 1 1 0 0 0]); % 只考虑位置,不考虑方向
作用:适用于抓取任务,忽略末端方向约束,提高求解稳定性。
2. tol(误差容限)
- 设定目标误差的容忍度(默认
1e-6)。 - 机械臂的误差计算公式: 误差 =
。
- 当误差小于
tol时,停止迭代。
示例:
q = robot.ikine(T, 'tol', 1e-4); % 允许 0.0001 误差
作用:适用于高精度任务,如工业焊接、激光加工等。
3. ilimit(最大迭代次数)
- 设定最大迭代次数,避免无限循环。
- 默认值:
1000。
示例:
q = robot.ikine(T, 'ilimit', 500);
作用:若 ikine() 计算时间过长,可减小 ilimit 以提高速度。
3.3 ikine()逆运动学求解实例
下面运用函数以及UR5机械臂模型进行一个逆运动学求解的展示。
%% 初始化
clear;
clc;
% 定义每个连杆的 D-H 参数
a0 = 0; alpha0 = pi/2; d0 = 162.5; theta0 = 0; offset0 = 0;
a1 = -425.0; alpha1 = 0; d1 = 0; theta1 = 0; offset1 = 0;
a2 = -392.2; alpha2 = 0; d2 = 0; theta2 = 0; offset2 = 0;
a3 = 0; alpha3 = pi/2; d3 = 133.3; theta3 = 0; offset3 = 0;
a4 = 0; alpha4 = -pi/2; d4 = 99.7; theta4 = 0; offset4 = 0;
a5 = 0; alpha5 = 0; d5 = 99.6; theta5 = 0; offset5 = 0;
% 使用 D-H 参数定义连杆
L0 = Link([theta0, d0, a0, alpha0, offset0]);
L1 = Link([theta1, d1, a1, alpha1, offset1]);
L2 = Link([theta2, d2, a2, alpha2, offset2]);
L3 = Link([theta3, d3, a3, alpha3, offset3]);
L4 = Link([theta4, d4, a4, alpha4, offset4]);
L5 = Link([theta5, d5, a5, alpha5, offset5]);
% 创建机器人模型
UR5 = SerialLink([L0 L1 L2 L3 L4 L5], 'name', 'UR5 Robot');
% 设定目标位姿
T_goal = transl(500, 200, 300); % 目标位置 (x=500, y=200, z=300)
% 求解逆运动学
q0 = [0, 0, 0, 0, 0, 0]; % 初始关节角度
q_ik = UR5.ikine(T_goal, q0, 'mask', [1 1 1 1 1 1], 'tol', 1e-5);
% 绘制求解后的机械臂位置
disp(q_ik);
UR5.plot(q_ik);
title('UR5 机械臂逆运动学求解结果');
具体的机选结果为:
![]()
图4 计算的结果
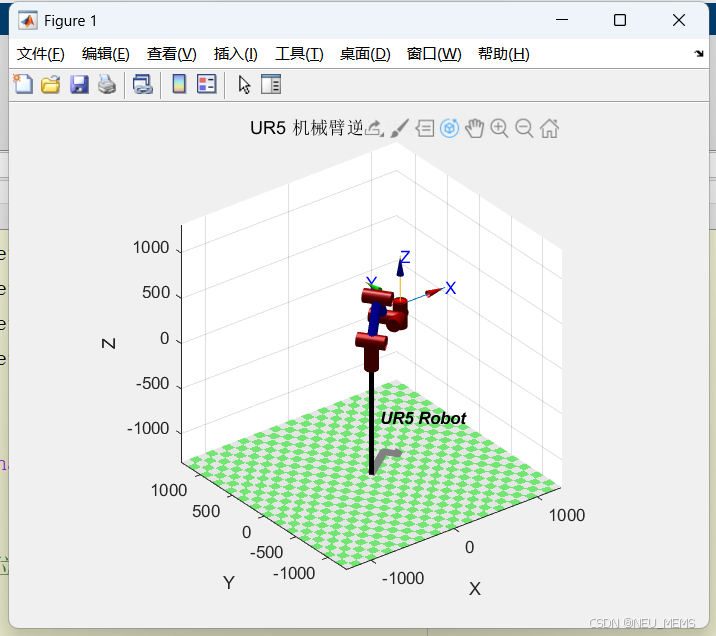
图5 最终的机械臂形态
3.4 其他函数
MATLAB Robotics Toolbox 提供了多种逆运动学求解函数,不同方法适用于不同的应用需求。以下是几个常见的求解函数及其特点:
1. ikcon() - 基于优化的求解
适用场景:当 ikine() 结果不稳定时,使用优化方法寻找更平滑的解。
- 采用优化方法,考虑到关节角度的约束。
- 计算速度比
ikine()稍慢,但求解更稳定。 - 适用于高自由度机器人,如 7-DOF 机械臂。
🔹 示例
q_ik = UR5.ikcon(T_goal);
2.ikunc() - 无约束求解
适用场景:探索可能的逆运动学解,但不考虑关节角度限制。
- 适用于机器人无关节角度约束的情况。
- 可能得到的解不适用于真实机器人,但可用于算法研究。
- 计算速度较快,适用于大规模逆运动学计算。
🔹 示例
q_ik = UR5.ikunc(T_goal);
3.ikine6s() - 解析解(仅适用于6轴机械臂)
适用场景:计算速度最快,适用于标准6轴机械臂(如 UR5)。
- 采用解析解法,计算速度远快于
ikine()。 - 仅适用于PUMA、UR5等6轴机械臂,不适用于非6轴机器人。
- 求解出的解唯一且稳定,不依赖
q0初值。
🔹 示例
q_ik = UR5.ikine6s(T_goal);
以上是对逆运动学求解的全部内容介绍,以后可以详细解释逆运动学的求解原理并且摆脱工具箱进行求解。


















 3567
3567

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









