









随着全球工业自动化和智能制造的不断推进,机器人技术正以前所未有的速度发展和普及,机械臂作为机器人系统中的核心执行机构,已成为现代生产、医疗、服务等领域的重要技术支撑。工业4.0、智能工厂以及新一代信息技术的融合,为机械臂带来了前所未有的发展机遇,同时也对其运动控制、路径规划和精度要求提出了更高的挑战。在这种大背景下,对机械臂运动学的研究与分析成为实现高效、精准自动化系统的基础,而 MATLAB 中的 Robotics Toolbox 则为这一领域提供了强大且易用的技术平台。
1.行业需求与应用场景
1.1 工业自动化
随着全球制造业向智能工厂转型,工业自动化的需求日益增长。机械臂在装配、焊接、搬运和喷涂等生产环节中发挥着至关重要的作用。它们能够在高精度、高速率下完成重复性工作,极大提高了生产效率和产品质量。通过运动学分析,可以准确地控制机械臂的每一个运动细节,从而实现精密的加工和装配任务。例如,在汽车制造过程中,机械臂需要精确地控制焊接轨迹和喷漆路径,确保每一处焊接和涂层均符合严格的工业标准。

图1 小米汽车生产线上的机械臂应用
1.2 服务与医疗
在服务机器人和医疗领域,机械臂的应用同样前景广阔。医疗手术机器人通过精细的运动控制,实现微创手术和远程操作,降低了手术风险并提升了手术精度。此外,康复机器人和智能护理设备也在逐步推广,为患者提供更为个性化和精准的康复训练。运动学分析在这些应用中尤为重要,因为它决定了机械臂对人体安全和治疗效果的影响。通过建立精确的运动模型,可以更好地预测和调整机械臂的行为,确保在与人体近距离接触时能够做到精准而温和的动作。
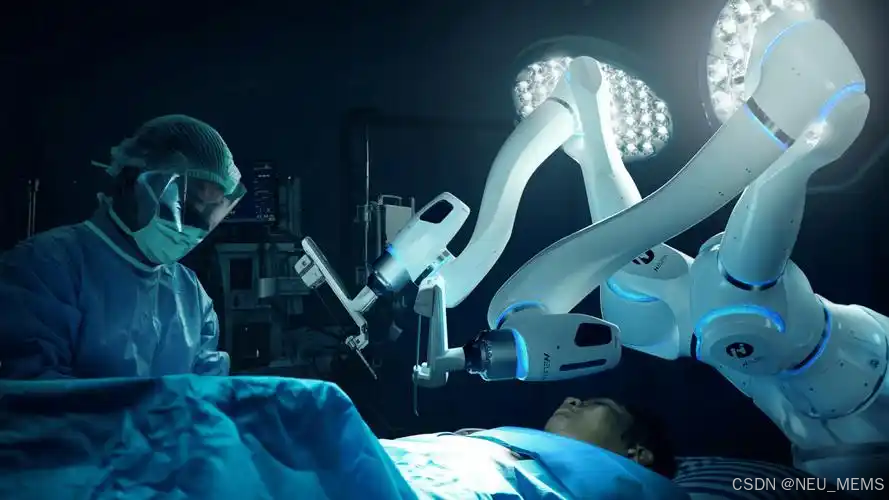
图2 医疗机械臂用于完成手术
1.3 智能物流与仓储
随着电子商务的蓬勃发展和供应链管理的不断升级,智能物流与仓储成为现代企业提升效率和降低成本的重要方向。机械臂在自动分拣、包装、装卸和搬运等环节中发挥着关键作用。利用运动学分析,可以精确规划机械臂的抓取和放置路径,确保在高密度货物存储环境下实现快速、高效且无碰撞的操作。此外,通过与实时数据和智能算法的结合,机械臂还可以实现动态调度和自适应调整,从而更好地应对物流过程中可能出现的各种不确定性和变化。例如,在自动化仓库中,机械臂能够高效完成货物分拣任务,大大缩短物流配送时间,同时降低人工错误率

图3 浙江杭州仓库的智能搬运机器人
2.MATLAB Robotics Toolbox的介绍与安装
2.1 MATLAB Robotics Toolbox的介绍
MATLAB Robotics Toolbox 最初由彼得·科克(Peter Corke)教授在上世纪90年代开发,目的是为机器人学的研究与教学提供一个便捷的工具平台。其设计初衷是让学生和研究人员能够通过简单直观的编程接口,快速实现机器人运动学、动力学、路径规划等方面的仿真与分析,从而加深对机器人理论的理解。
随着时间的推移,这个工具箱逐步完善并广泛应用于全球各大高校和科研机构。它不仅涵盖了正、逆运动学求解、动力学建模和仿真,还支持机器人视觉、传感器数据处理等多项功能,成为机器人系统开发的重要辅助工具。同时,由于其开源特性和强大的社区支持,用户可以根据具体需求进行二次开发和功能扩展,极大地促进了机器人学科的发展与交流。
近年来,虽然 MathWorks 自身也推出了 Robotics System Toolbox,提供了与 MATLAB 无缝集成的工业级解决方案,但彼得·科克的 Robotics Toolbox 依然因其易用性和学术性在教育和初期研发中占有一席之地,为广大研究者提供了一个快速上手和验证理论的平台。
以下为经典的学习书籍。
图4 MATLAB Robotics Toolbox 经典学习书籍
2.2 MATLAB Robotics Toolbox的优势
功能全面且模块化:MATLAB 的 Robotics Toolbox 为用户提供了一整套从运动学到动力学的解决方案。无论是正运动学、逆运动学还是轨迹规划,工具箱都内置了丰富的函数和模块,可以快速搭建机械臂模型,进行仿真和分析。这种模块化设计使得用户能够根据具体需求灵活调用相关模块,而不必从头开发所有功能,极大降低了开发难度和学习成本。
可视化能力强:工具箱内置的 3D 仿真与动画演示功能,可以直观地展示机械臂的运动状态和轨迹变化。对于复杂的运动学问题,图形化的展示不仅能帮助用户更好地理解系统动态,还能在调试和优化过程中提供实时反馈。借助 MATLAB 强大的绘图功能,用户能够将仿真结果转化为精美的图形、动画和报告,为项目展示和学术交流提供了极大的便利。
与 MATLAB 生态系统的无缝集成:MATLAB 作为全球领先的数值计算和数据分析平台,其生态系统中涵盖了众多高级数学、信号处理、图像处理等工具箱。Robotics Toolbox 能够与这些工具箱无缝对接,使得用户可以将机器人仿真与数据分析、算法优化、系统设计等其他工作流相结合。无论是进行实验数据处理、系统建模,还是算法验证,MATLAB 都能够提供从数据采集、处理到结果展示的全流程支持。
2.3 MATLAB Robotics Toolbox的下载
MATLAB Robotics Toolbox 由 Peter Corke 教授开发,通常可以在他的官方网站或 GitHub 上找到最新版本。你可以访问官方网站或直接在 GitHub 上搜索“Peter Corke Robotics Toolbox”。
点击链接跳转官方网站下载Robotics Toolbox:https://petercorke.com/toolboxes/robotics-toolbox/
图5 Robotics Toolbox官方网站下载界面
资源在主页也可以找到下载,并且配备了简单的调试程序
2.4MATLAB Robotics Toolbox的安装
通过 MATLAB 安装: 将下载的 .mltbx 文件保存到计算机上。打开 MATLAB,使用文件浏览器找到该文件,双击即可自动启动安装过程。
图6 文件浏览器中的安装文件
手动添加路径(通常可以忽略): 如果您下载的是压缩包(如 .zip文件),请先解压缩,然后将解压后的文件夹放置在合适的位置。打开 MATLAB,依次点击菜单栏的 "Home" -> "Set Path" -> "Add with Subfolders...",选择解压后的文件夹,点击 "Save" 保存路径设置。
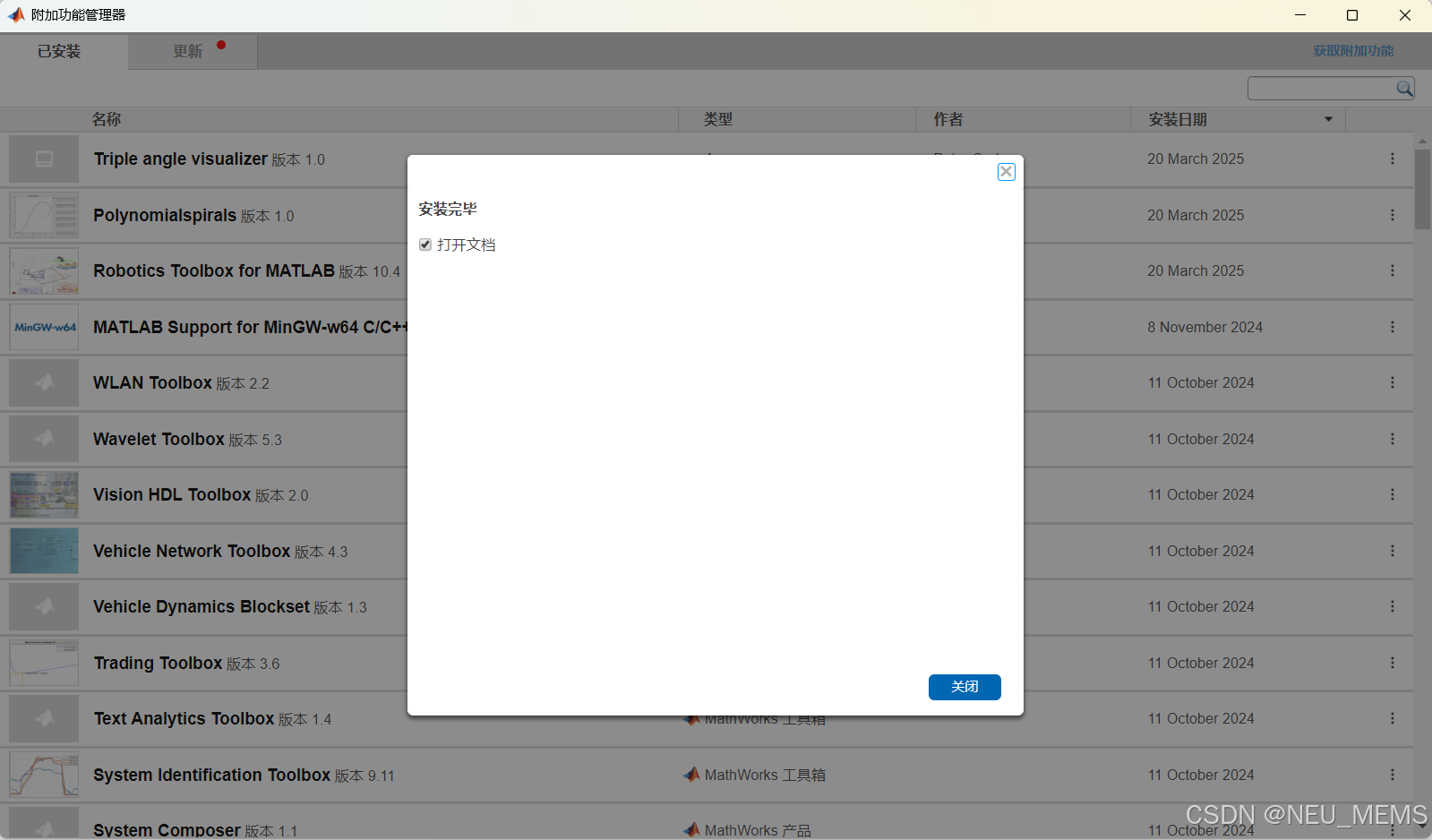
图7 安装成功画面
验证安装是否成功:
检查工具箱列表:在 MATLAB 命令窗口中输入 ver,查看已安装的工具箱列表。如果安装成功,您将看到 "Robotics Toolbox" 及其版本信息。


图8 Robotics Toolbox及其版本信息
运行示例代码: 在命令窗口中输入 rtbdemo ,如果弹出示例列表窗口,说明安装成功。
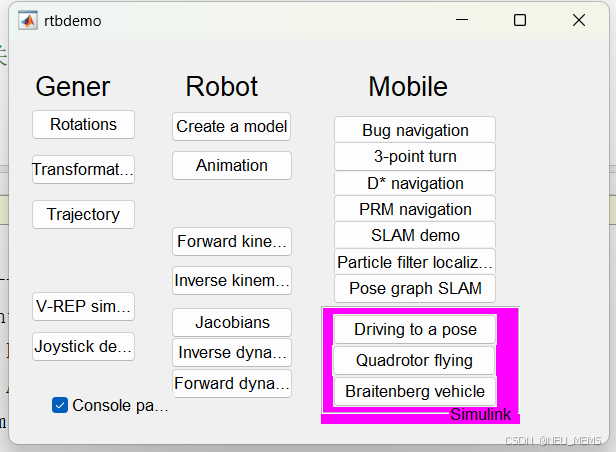
图9 示例列表窗口
使用简单地调用程序:
% 加载 Puma 560 机器人模型(该命令会将机器人模型 p560 加载到工作空间中)
mdl_puma560;
% 绘制机器人在给定关节角度下的三维模型
figure;
% 启用示教器界面
p560.teach();
title('Puma 560 机器人示例运动学仿真');通过程序调用已有的puma560机械臂模型,并且打开了示教器功能,通过按钮可以调节各个关节位置,同时观察末端执行器位置,对机械臂有简单的了解与感受。
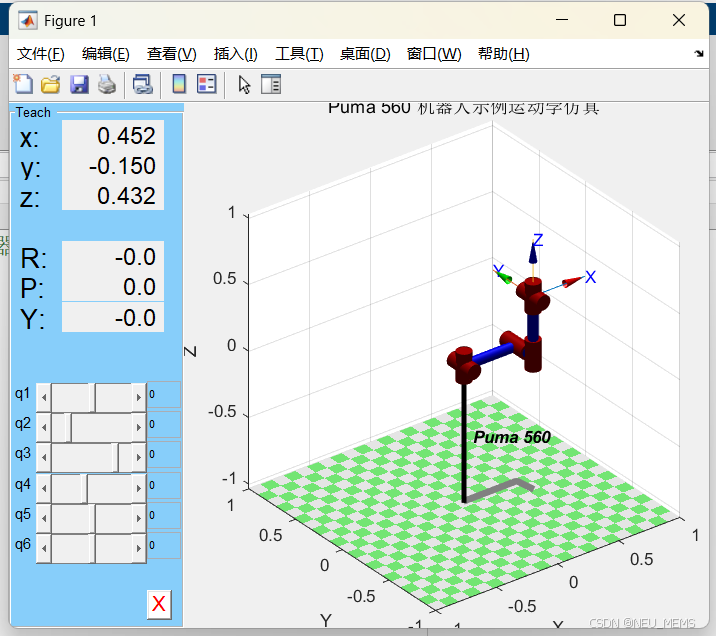
图10 示教器画面
接下来会对机械臂的运动学建模及进行介绍。


















 2269
2269

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









