







 本文详细介绍了工业机器人腕关节的伺服控制系统,包括上下两级控制器的功能、关节伺服系统的结构和控制方法。系统采用PC+DSP运动控制卡模式,伺服电机选用永磁同步交流伺服电动机,具有高精度和良好动态特性。文中还讨论了PID控制和ADRC控制的算法,并对比了两种控制效果。硬件选型包括伺服控制器和驱动器,强调了永磁同步电动机的优势。此外,针对实际应用场景设计了定制的伺服控制器母板,以满足尺寸和功能需求。
本文详细介绍了工业机器人腕关节的伺服控制系统,包括上下两级控制器的功能、关节伺服系统的结构和控制方法。系统采用PC+DSP运动控制卡模式,伺服电机选用永磁同步交流伺服电动机,具有高精度和良好动态特性。文中还讨论了PID控制和ADRC控制的算法,并对比了两种控制效果。硬件选型包括伺服控制器和驱动器,强调了永磁同步电动机的优势。此外,针对实际应用场景设计了定制的伺服控制器母板,以满足尺寸和功能需求。
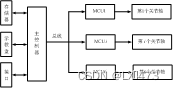
工业机器人的分布控制系统采用上、下两级控制器实现系统的全部控制功能。上一级控制器负责整个系统管理以及坐标变换、轨迹插补和系统自诊断等功能;下一级控制器由多个微控制器(MCU)组成,每一个MCU控制一个关节运动,它们并行完成各个关节的伺服控制任务。上下级控制器之间通过总线进行通信。
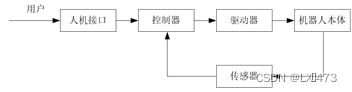
典型的工业机器人是具有六个自由度的关节型机器人。从控制的角度来说,工业机器人是一个典型的强耦合、非线性系统,控制难度大。本章主要介绍工业机器人腕关节控制系统的基本原理,系统组成和各部分的主要功能。控制系统性能在很大程度上决定了机器人的性能。一个良好的控制系统要有灵活、方便的操作方式,多样的运动控制方式和可靠性。主要构成为人机接口、控制器、驱动器、传感器系统。
用传感器感受速度变化后,经由单片机传送到显示系统,输出转速。单片机输出控制信号,控制驱动电路使得步进电机转动。利用单片机输出时钟信号和控制信号,电机转轴上有磁力片与霍尔传感器接近,霍尔传感器把磁场变化转变为电压脉冲变化,最终经单片机处理后输出到数码管显示转速。
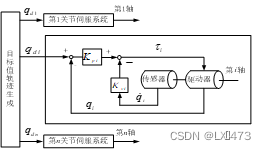
上述这种关节伺服系统把每一个关节作为单纯的单输入单输出系统来处理,所以结构简单,现在的工业机器人大部分都由这种关节伺服系统来控制。把这些耦合当作外部干扰来处理,在精度要求不高时也能满足要求。但因重力引起的静常偏差不可避免,因此需要加入积分项:
也可在PD控制基础上增加重力补偿消除静差:
工业机器人的速度控制指的是对机器人的速度反馈控制,若关节的控制量是
 ,
,
就可组成速度伺服控制系统。作业任务:按一定方向移动或绕规定轴转动,则有: , 。考虑到对此式反复迭代有累积误差,计算出考虑末端误差 的 ,并把这个 作为各关节速度伺服系统的目标值进行控制。
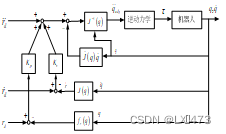
如果关节的控制量是引入了加速度量纲 ,就可组成如图所示的加速度伺服控制系统。
可简化计算量:
如果控制量是引入了加速度 量纲 ,就可组成如图所示的加速度伺服控制系统。
在腕关节伺服系统设计中进行硬件、软件的设计。包括系统总体方案设计,控制芯片应用系统设计,驱动电路设计,测量电路设计等。本节将使用AT89C51运动控制器使手腕关节达到相应的位置、速度及反向控制,采用DSP和FPGA/CPLD技术,可编程伺服采样周期以实现3个伺服轴并行执行手腕三个关节的控制。考虑到基本PID控制在控制系统中已经能够取得基本满意的效果,首先讨论了直流伺服系统基本PID控制算法、参数整定及控制算法的实现方法。并讨论了基于ADRC的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 107
107

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











