







第十章 基于单片机的PMSM控制系统硬件电路设计
10.1 硬件电路设计概述
在对腕关节的控制器的设计上,主要采用单片机作为主控制器,通过双电源为控制机和伺服电机进行供电,从而保障机械臂的正常使用。电路结构图如图10-1所示。

图10-1 电路结构图
单片机最小系统也称最小应用系统,是指用最少的元件组成的可工作的单片机系统。电源电路是电源的稳定可靠是系统平稳运行的前提和基础,所以为单片机系统提供稳定的电源供电对一个完整的电源电路来说非常重要。时钟电路:时钟是单片机的心脏 ,单片机指令的执行需要用到时钟信号晶振就是用来为单片机提供基本时钟信号的,时钟频率越高,单片机的运行速度具越快。每一个单片机都有它能够接受的最高时钟频率。复位电路:单片机复位电路的作用就是把电路复位到一个确定的状态。在上电、断电或者发生故障后都要复位。下载电路:程序下载电路可以将编写好的程序下载到单片机中。
系统硬件设计包括AT89C51单片机的最小系统、电源模块、键盘控制模块、步进电机驱动模块、数码显示模块、测速模块(含霍尔片UGN3020或者其他测速原件)6个功能模块的设计,以及各模块在电路板上的有机结合而实现。软件设计包括键盘控制、步进电机脉冲、数码管动态显示以及转速信号采集模块的控制程序,最终实现对步进电机转动方向及转动速度的控制,并将步进电机的转动速度动态显示在LED数码管上,对速度进行实时监控显示[20]。
10.2 芯片选择
1、 AT89C51单片机
AT89C51是一种带4K字节闪烁可编程可擦除只读存储器(FPEROM—Falsh Programmable and Erasable Read Only Memory)的低电压,高性能CMOS-8位微处理器,俗称单片机。AT89C51的管脚说明如下:
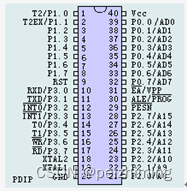
图10-2 芯片结构图
P0口:P0口为一个8位漏级开路双向I/O口,每脚可吸收8TTL门电流。当P1口的管脚第一次写1时,被定义为高阻输入。P0用于外部程序数据存储器,为数据/地址的八位。
P1口:P1口是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL门电流。P1口管脚写入1后,被内部上拉为高,可用作输入。
P2口:P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1292
1292

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











