






引言(为什么需要两级放大器):上一节,我们介绍了一款折叠式共源共栅放大器,增益达到了7
0dB
,其它性能也比较良好。但在实际应用中,单级放大器的性能无法满足需求,并且仅靠改变电路中MOS
管的尺寸已无法对电路的性能进行大幅度的提升。
除此之外,单级放大器在面对多种指标要求时会产生各种矛盾,比如要想提升运放的线性范围,则增益会下降,直接驱动大负载时,放大器的增益与带宽都会受到严重的影响,因此运算放大器通常需要两级甚至两级以上的放大器组成。
为什么不用三级及以上的放大器?
对于更多级别的放大器,比如三级放大器的设计,多数是为了满足增益的要求,但三级放大器极点的增多会引起稳定性的下降,因此两级放大器是目前最常见的多级运放结构
主要内容:
(1)本章将讨论一款两级运算放大器,这款两级放大器对比上一章的折叠共源共栅放大器的MOS管数量得到了减少,但性能却得到了提升。通过合理的选择两级放大器电路的结构,可以满足大多数的指标要求。
(2)在介绍两级放大器设计思路的同时,还介绍了g
m
/
I
D
设计方法,这种设计方法相比利用饱和区平方律公式进行手算更加准确,并且在电路性能指标之间进行折中时也比较直观。通过Cadence
软件中进行仿真验证,结果显示了g
m
/
I
D设计方法的优越性
本章共分为三节介绍,
两级运算放大器设计基础,
两级运算放大器结构确定与参数计算以及电路仿真实例,本节先来介绍两级运算放大器设计基础
一、两级放大器结构概述
单级放大器只经过一次转换,即电压到电流的转换或者电流到电压的转换,因此增益往往被限制在MOS管的跨导与输出阻抗的乘积。
而上一章所设计的的
折叠共源共栅放大器,差分输入级将差模电压转换为差模电流,差模电流再经过电流镜负载恢复成差模电压,放大器的增益则相当于
两个MOS管本征增益的乘积。但由于其共源共栅结构的存在,其输出摆幅受到了非常大的影响,因此
无法用于低电压电源中。
若想满足较大的输出摆幅以及较高的增益,仅靠单级放大器已经无法满足,因此两级放大器的设计需求就更加广泛。 两级放大器相比单级放大器可以实现更多高性能的要求,对于单级放大器
仅让增益达到
50dB
就需要降低其它许多性能指标,而两级放大器假设每级增益为40dB
,总增益就能轻松达到
80dB
以上,并且其速度与带宽相比单级放大器都优秀许多
设计思路:
在进行两级放大器设计时,往往会将这两级分开进行处理与设计,如图所示
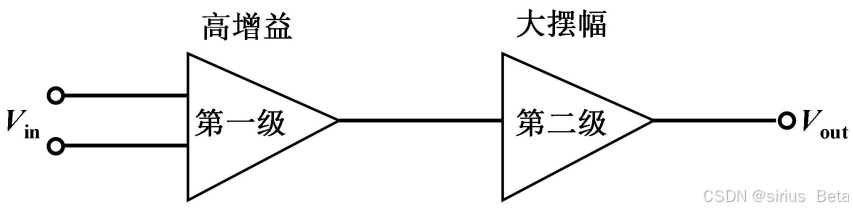
(1)通常输入级设计为高增益(通常用折叠式共源共栅),输出级设计为大摆幅(很少考虑高增益的共源共栅结构)
(2)相比单级运放,两级运放输入级基本都采用差分输入,因为电路复杂度增大,更需要提高电路的稳定性,
抑制输入噪声与共模干扰
二、两级放大器频率补偿
实际应用中,运算放大器常常采用负反馈系统来改善运放的稳定性,并且其开环增益越高,反馈放大器的精度也越高。但也正由于反馈系统的接入,反馈将输出反馈到输入后,系统很容易因为设计误差等失误而出现振荡,因此一个稳定的负反馈系统就需要有足够的相位裕度,而根据设计经验,相位裕度在60
°
~90
°之间,系统会表现出较好的性能。
相位裕度给系统的影响:相位裕度过小,系统容易发生振荡而变得不稳定;相位裕度过大,系统的响应速度则会大幅度减小,因此在选择相位裕度时也要考虑速度与稳定性的折中。
两级运放需要频率补偿的原因:对于单级运放,通常只有一个极点,相移不会大于90deg,所以不需要相位补偿
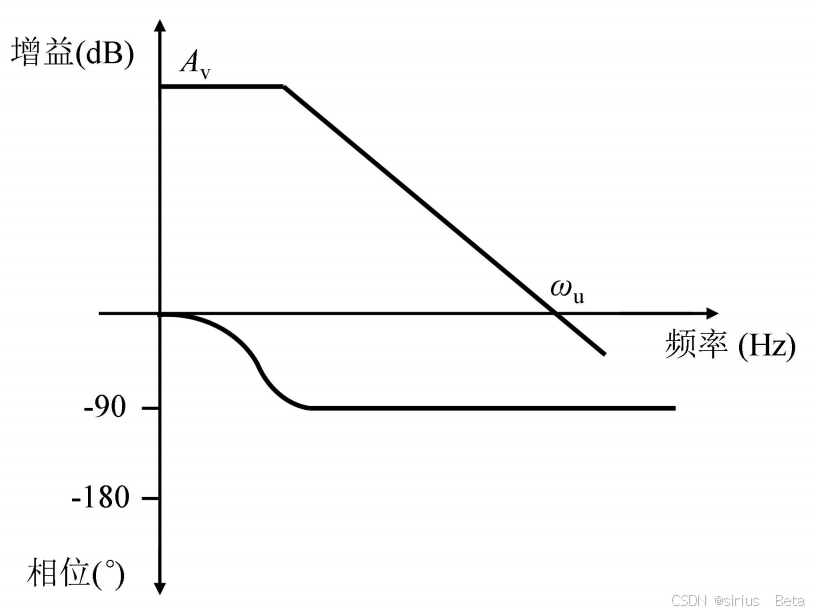
对于两级放大器,相移能够达到180° ,当相移
180
°的频率点在单位增益频率之前,此时再加上负反馈所引入的180
°相移,运放系统的相移就超过了360
° ,这个频率点的增益大于1
,运放会将自身的噪声进行放大,运放系统就会在这个点发生振荡,因此在设计时两级放大器往往需要进行额外的频率补偿。
(补充相关知识:转载
模拟集成电路设计——相位裕度和频率补偿 - 知乎
放大器外接负反馈形成闭环回路时,负反馈提供180°的相移,如果放大器本身能提供180°相移,且此时的环路增益AF≥1就会产生振荡。闭环回路的增益表达式为
当FAv0=-1时就会产生振荡。若要求电路稳定需要满足两个条件:
1°当环路增益为1时,相位小于180°;
2°当相位为180°时,环路增益小于1。)
频率补偿最常用的方法——米勒补偿(Miller Compensation)
具体实现:在两级放大器的输入级与输出级之间添加一个
米勒电容Cc(网上和书上关于Miller补偿的原理和方法有很多,在此不赘述,可以参考Razavi的书)
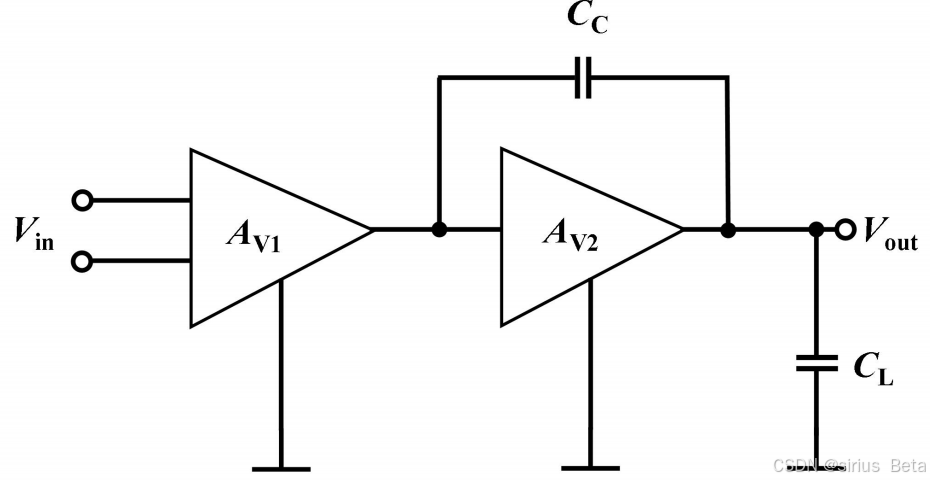
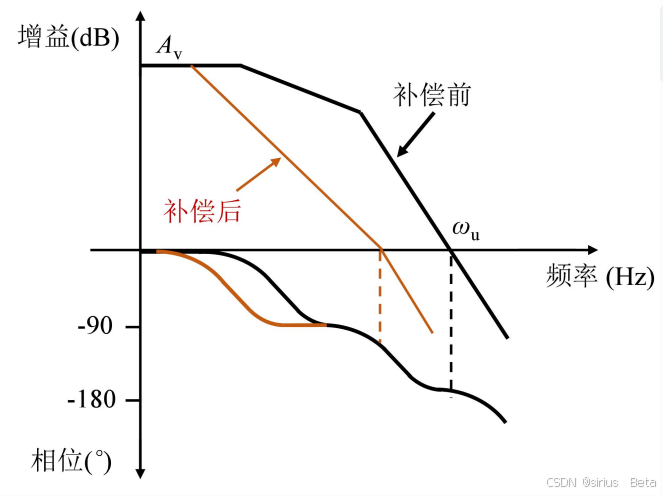
就可以实现极点分裂,使非主极点频率变得更大,主极点频率变小,即将图像向左移,如图所示。这样可以使单位增益频率在非主极点之前,相移超过180
°的频率点在单位增益之后,在这个点系统就不会发生振荡。在设计两级甚至多级运放时,必须留出足够的相位裕度,从而使系统能够保持稳定。
三、gm/ID设计方法介绍
引入
gm/ID法的原因:
(1)上一章节我们设计折叠共源共栅放大器时,在确定电路结构之后,通过指标中的压摆率确定了电路的电流,再从单位增益带宽入手,利用晶体管的Square-law公式来确定电路中
MOS
管的尺寸,最终完成电路设计后,其仿真结果虽能满足设计指标,但存在着较大的误差,这在设计一些要求严格的复杂电路上非常受限,电路往往需要经过多次调试才能满足设计要求。
(2)除此之外,在先进的工艺库中,MOS
管的模型也变得更加复杂,很多工艺库已经无法直接查找到MOS
管的
μ
、
Cox
与
λ
参数,
MOS
管的短沟道效应也变得更加严重,这时的Square-law
公式已经不适合计算晶体管的尺寸。
(3)通常在进行电路设计时,会以过驱动电压作为关键参数来对电路中的
MOS管进行设计。其中MOS
管一般被设置工作在饱和区,即令过驱动电压
VOD>0
。目前随着多种需求的出现,为了满足低功耗的要求,有时需要MOS
管工作在亚阈值区来获得更低的功耗,由于二阶效应的存在,这时所设计MOS
管的过驱动电压与实际大小存在着非常大的误差。
在本章节中,我们将采用另一种设计方法,即利用gm/ID参数代替过驱动电压对MOS管的工作区域进行选择,
通过计算机软件仿真与手算相结合来进行电路设计,这个gm/ID参数不仅在设置时误差较小,并且对电路性能上的折中更为直观。
具体实现:(后面会出一期单独讲解gm/Id法)
MOS管的工作原理
(1)当
VGS
小于VTH
时,
MOS
管会关断,但实际上VGS
在
VTH
附近时,
MOS
管仍然存在较小的漏电流ID
,此时我们称MOS管工作在亚阈值区,也称为弱反型区
(2)当VGS
大于
VTH
时,
MOS
管会工作于饱和区,也称为强反型区
(3)在实际情况下,强反型区与弱反型区中间会有一个中等反型的过渡区。根据设计经验,一般认为过驱动电压大于80mV时,
MOS
管才会真正工作在饱和区
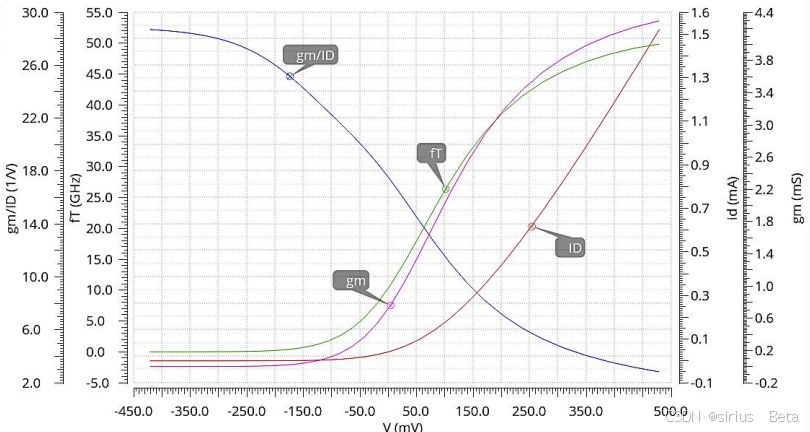
如上图
所示,图像的纵坐标为
MOS管的过驱动电压,横坐标为MOS
管的跨导gm
、特征频率
fT
、漏电流
ID以及跨导效率gm/ID
从图中可以看出,当工作于亚阈值区时,MOS
管的电流、跨导和特征频率fT
都比较小,较低的电流意味着较低的功耗,与此同时跨导效率gm/ID却很大,因此在一些有低功耗需求的电路会考虑MOS
工作在亚阈值区时的这些特性,而在一些对速度有需求的电路中应尽量避免MOS
管工作在亚阈值区
由MOS管工作在饱和区的平方律公式,我们推出这样一个关系式,即
通过这个式子不难发现,
g
m
/
I
D
与过驱动电压有着紧密的关系,选择电路的g
m
/
I
D
其实就是在选择电路的过驱动电压
V
OD
。比如当
g
m
/
I
D
等于
10
,那么V
OD
≈0.2V
,从这里就可以看出
gm/ID
的大小也能够反映器件的工作区域,并且选取不同的g
m
/
I
D
值实际上是电路在功耗和速度之间进行的折中
如何应用gm/Id法?——利用这个参数来替代平方律公式设计电路的器件尺寸
在设计之前,首先要对工艺库的晶体管进行仿真扫描,找出
g
m
/
I
D
与晶体管的本征增益、电流密度I
D
/
W
以及其它参数之间的关系,然后再根据设计指标进行折中考虑,为每一个MOS
管选取合适的
g
m
/
I
D
大小
本节的内容就到这里,下一节将会着重介绍通过gm/Id法来确定两级运放的结构和参数计算

















 2457
2457

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









