







前言:
此驱动板是个人参加全国大学生智能汽车竞赛摩托组所设计的驱动,现如今用来进行基本的电路等学习。
一,何为驱动,为什么需要驱动板?
一、驱动的概念
驱动在电子领域中扮演着至关重要的角色。它不仅仅是提供电能那么简单,更重要的是要确保电能或信号能够按照设备的需求进行精确的控制和调节。例如,在驱动电机时,需要确保电机能够按照预定的速度、方向和转矩进行工作,这就需要驱动电路能够提供相应的控制信号和电能。
二、为什么需要驱动板
信号放大与转换:
- 在许多情况下,GPIO(通用输入输出)端口的输出信号可能不足以直接驱动电机等外设。驱动板可以对这些信号进行放大,以确保它们具有足够的功率来驱动外设。
- 同时,驱动板还可以将GPIO输出的数字信号转换为电机等外设所需的模拟信号或特定形式的脉冲信号。
保护与控制:
- 驱动板通常包含各种保护电路,如过流保护、过热保护等,以确保在驱动外设时不会因电流过大或温度过高而损坏设备。
- 此外,驱动板还可以提供精确的控制功能,如PID调节、速度控制、方向控制等,以满足不同应用场景的需求。
接口匹配与隔离:
- 驱动板可以作为不同硬件设备之间的接口转换器,将主板或其他设备的电信号转换为适合被控制设备的接口信号。
- 同时,驱动板还可以提供必要的隔离功能,以防止不同设备之间的电气干扰和信号串扰。
提高系统稳定性与可靠性:
- 通过使用驱动板,可以确保电机等外设能够稳定、可靠地工作。驱动板可以监测外设的工作状态,并在出现异常时及时采取措施进行保护。
- 此外,驱动板还可以提高整个电子系统的稳定性和可靠性,降低因外设故障而导致的系统崩溃风险。
二,驱动芯片8701
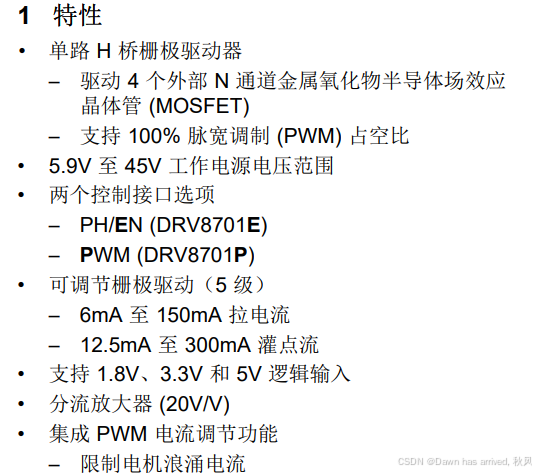
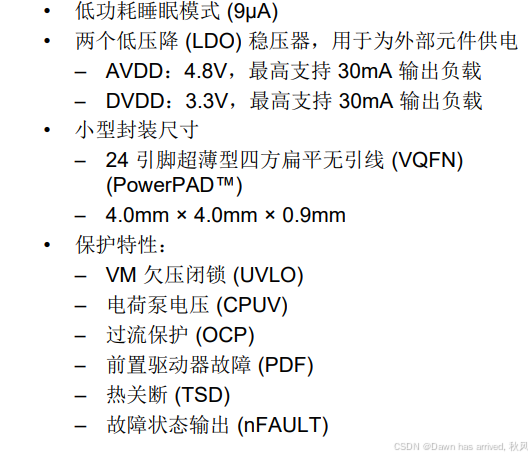
1.芯片介绍
(i)驱动芯片采用德州仪器(TI)DRV8701ERGER 有刷直流电机全桥栅极驱动器。(下图为德州仪器官方数据手册内容)
(ii).MOSFET选择如下
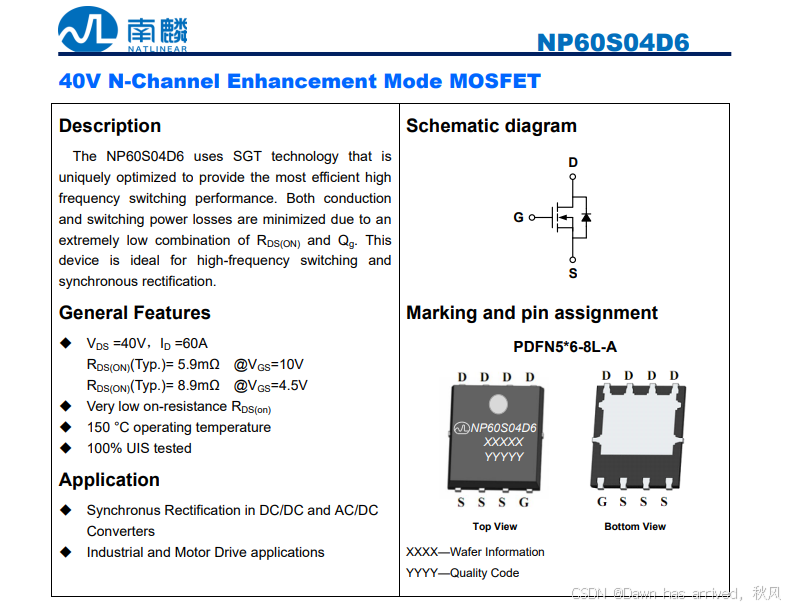
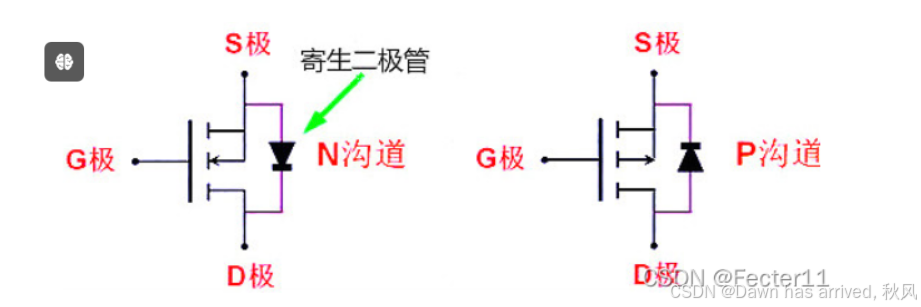
G :栅极 S :源极 D :漏极
对于NMOS我们看箭头,都是远离源头。 指向漏极 电流的流向是从漏极到源极
对于PMOS我们看箭头,都是指向源头。 指向源极 电流的方向是从源极到漏极
P:POSITIVE积极的寻找自己的起源
N:NEGTIVE消极的远离自己的源头--摘自csdn 学海无涯_come_on
所以N沟道VCC连接D漏极 GND连接源极
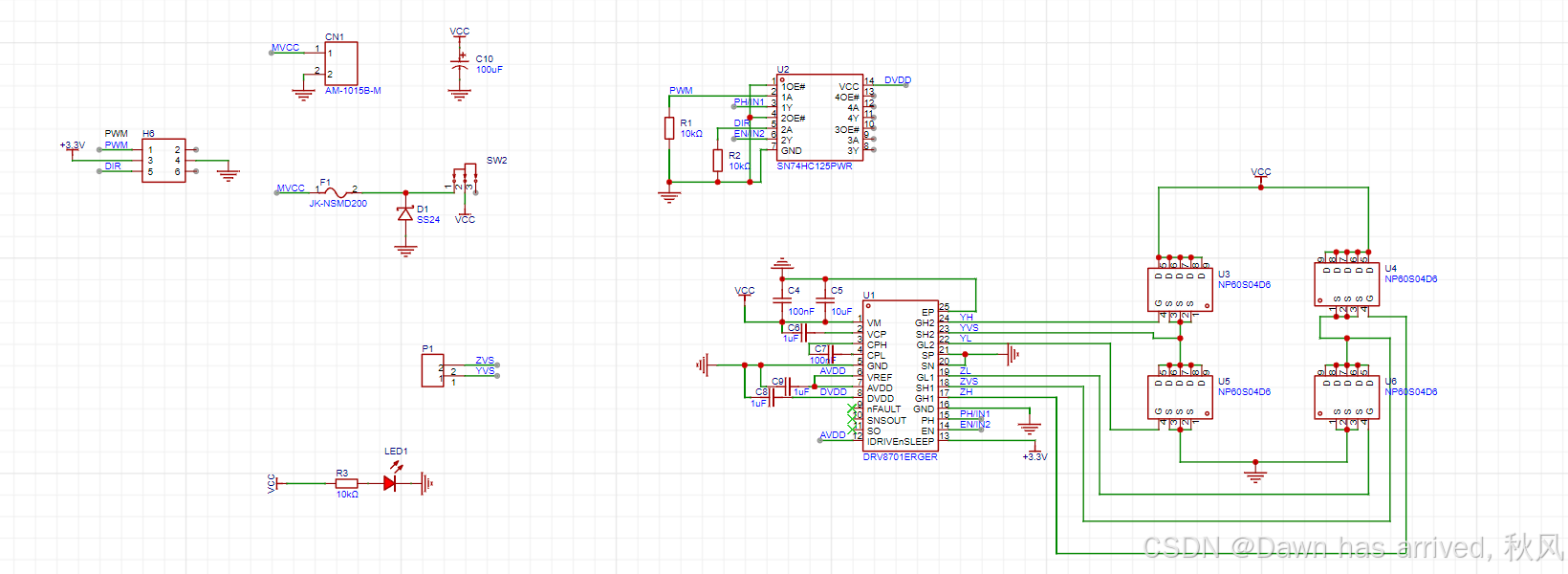
2.实际电路分析
下面我将依据官方数据手册具体分析该电路的设计原理: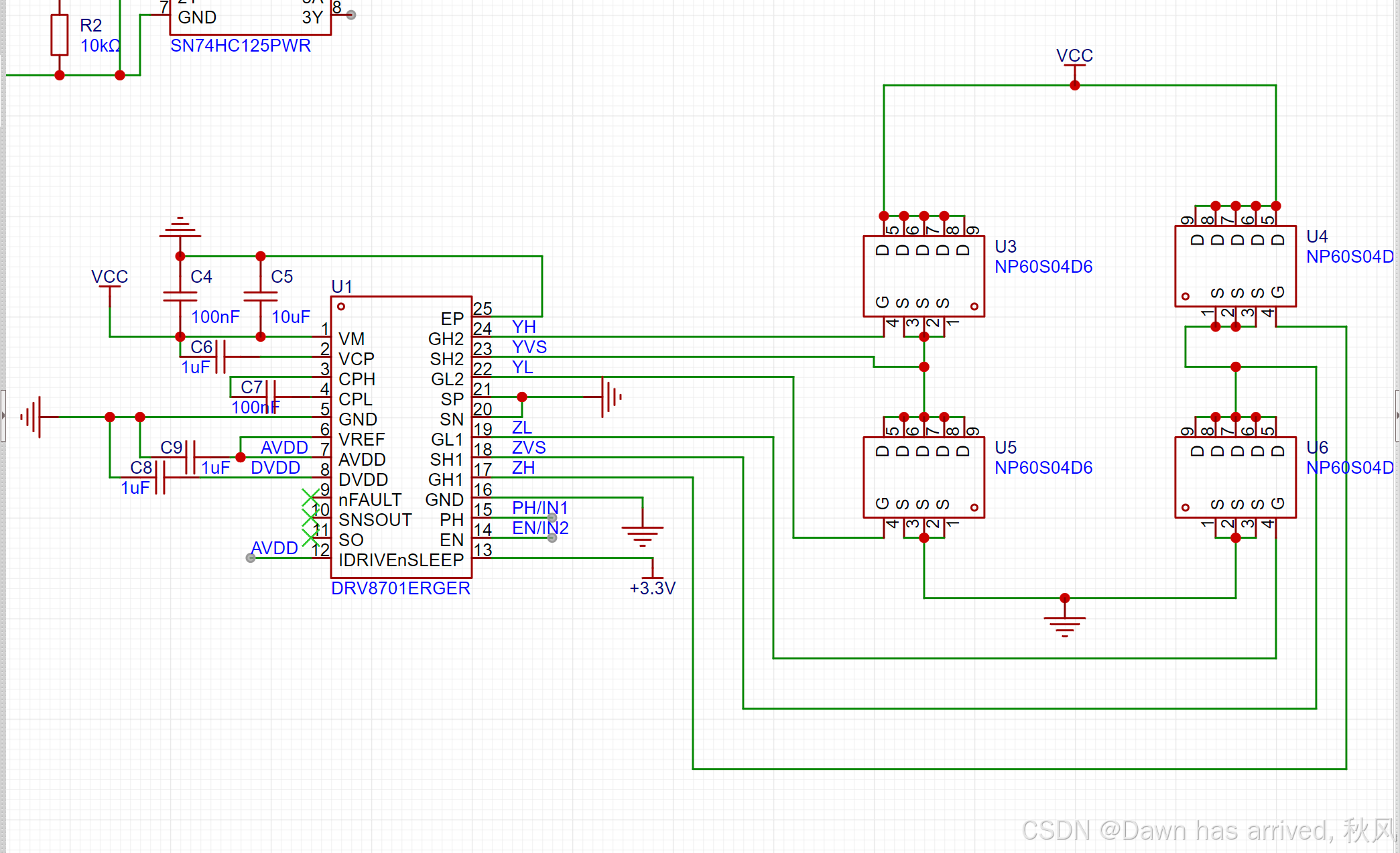

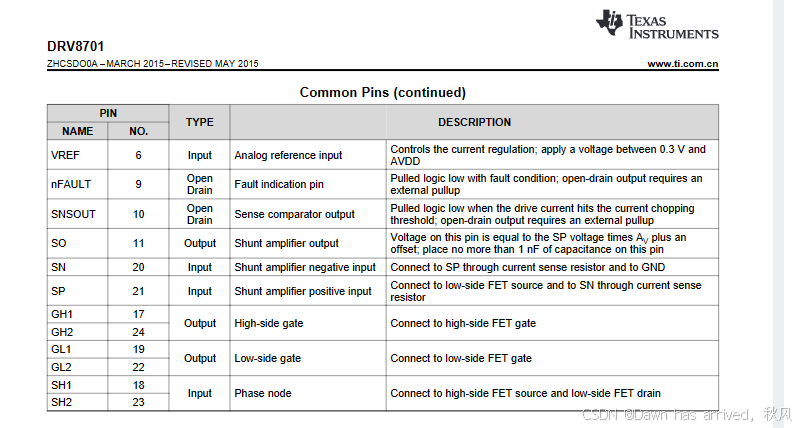
以上是TI公司对8701这款芯片的引脚配置和功能解释表。
根据该手册不难完成VCP,VM等芯片电容等配置。我将具体讲讲H桥: 在8701中SH1和SH2 是作为芯片输出,也就是接入直流电机正负极中即可。GH 和 GL含义对应高位栅极和低位栅极,H的构造,就是左上右上是GH 同理下方的是GL。 根据N沟道导通原则,高位nmos的D漏极接VCC S源极接低位nmos的漏极,低位nmos的漏极则接地。 通过驱动四个Nmos的栅极(高电平导通低电平截止)来控制H桥的导通。
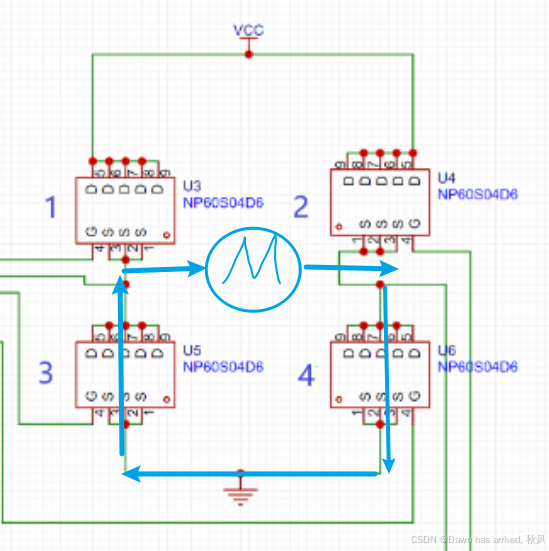
H桥:
在驱动直流电机中,常常会使用H桥电路进行驱动电机
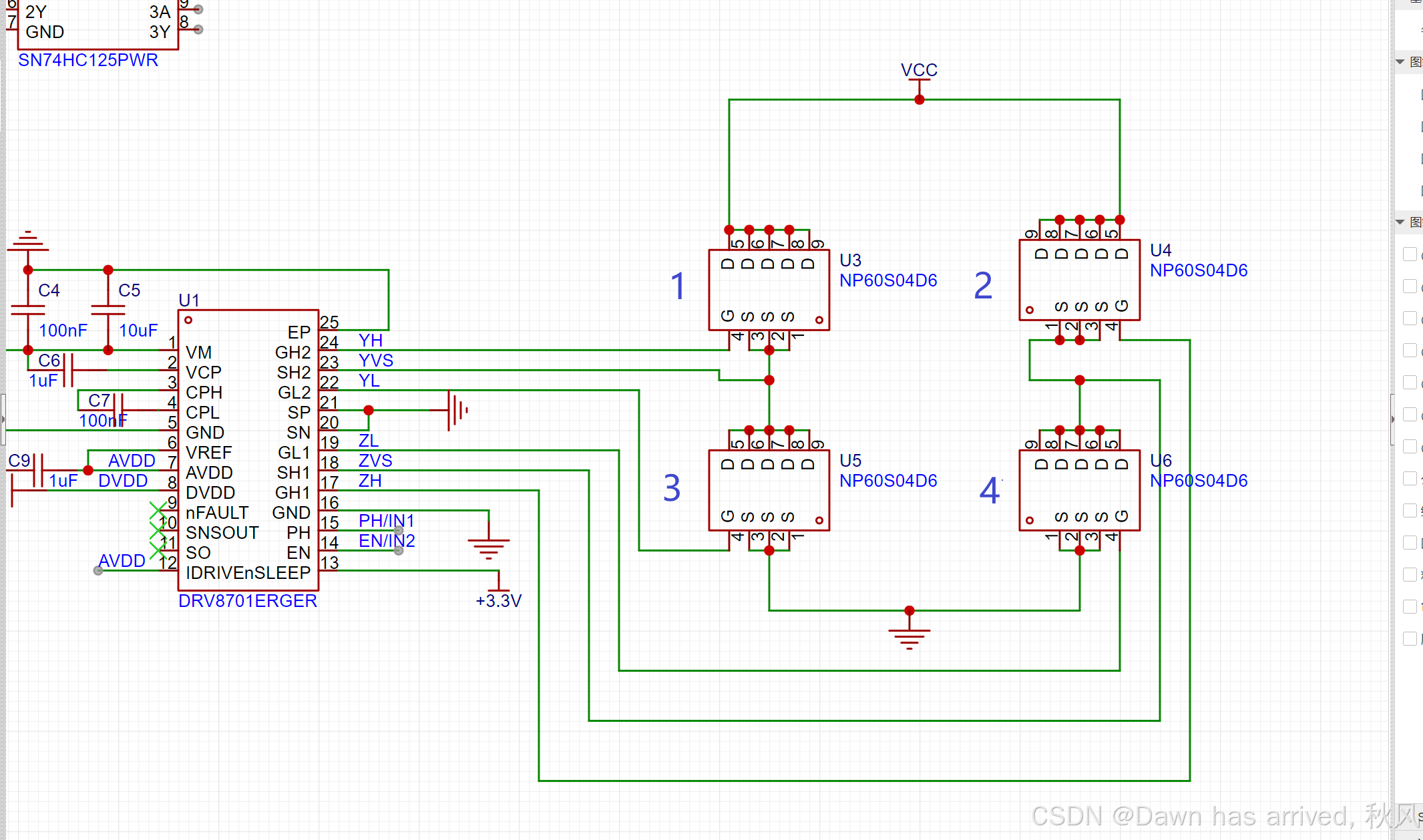
1,2为高位mos 3,4为低位mos。由于TI驱动芯片内部已经完成了所有功能设计,所以YVS和ZVX相当于接电机的正负极(位置不固定),可以通过输入引脚EN改变正转反转方向。这里采用三态缓冲器来保证信号的持续输出,将外部信号PWM和dir方向信号传入缓冲器中最后输出至8701驱动芯片的PH和EN引脚中。完成对电机控制。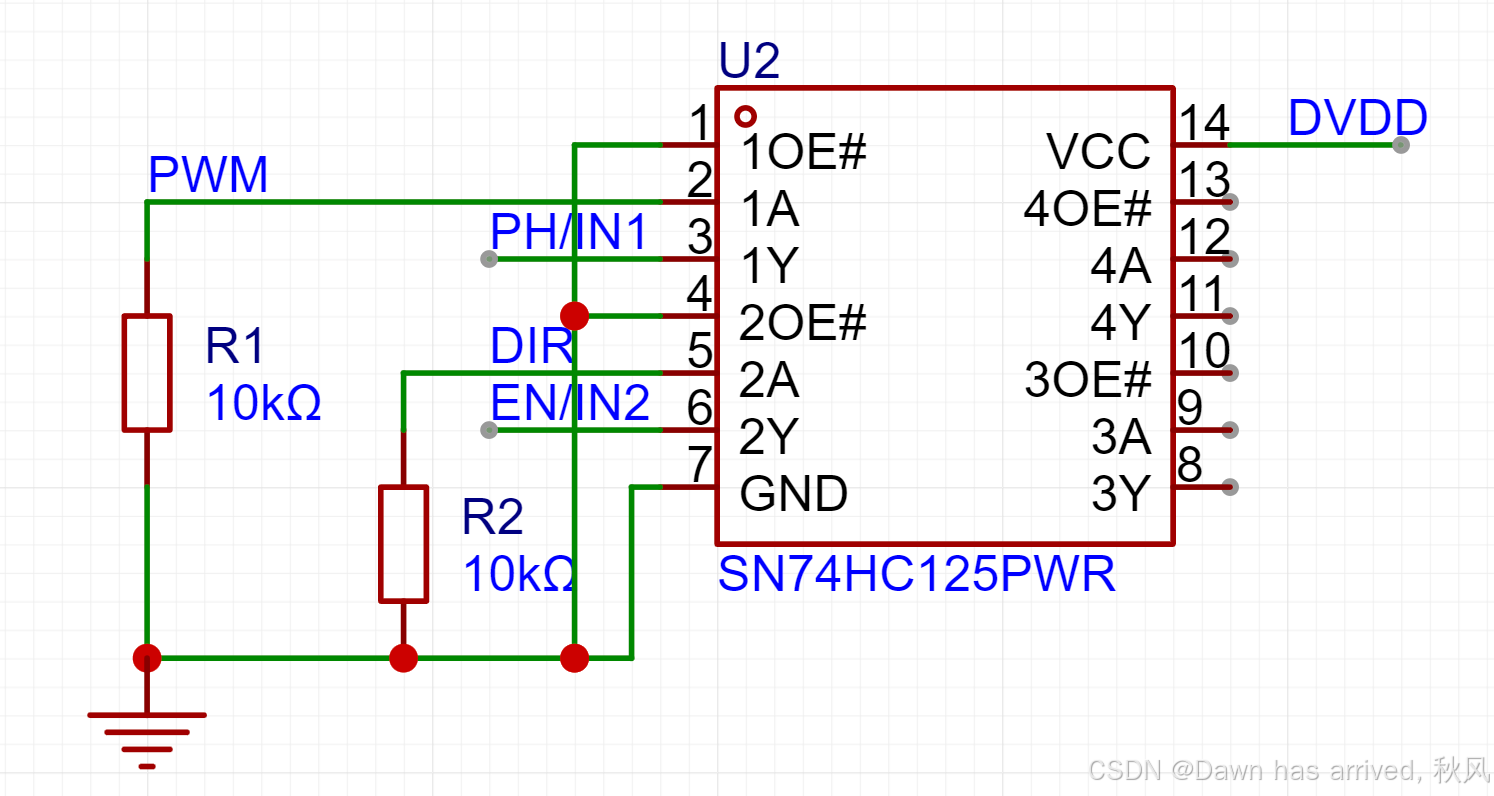
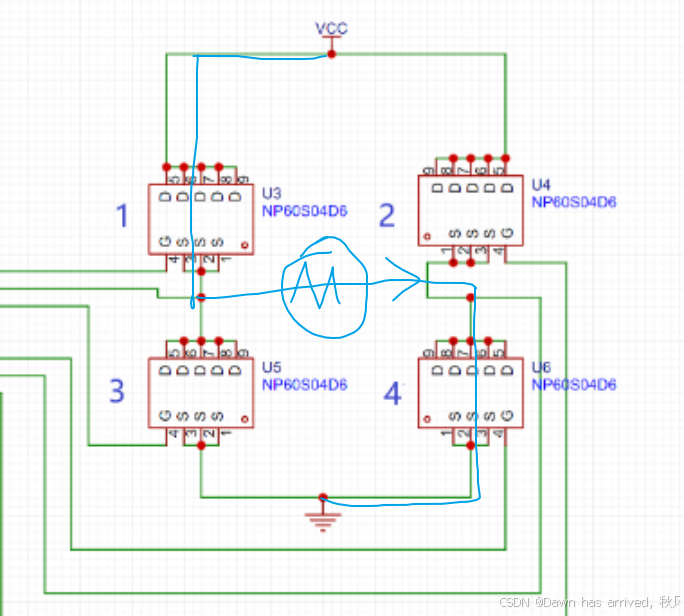
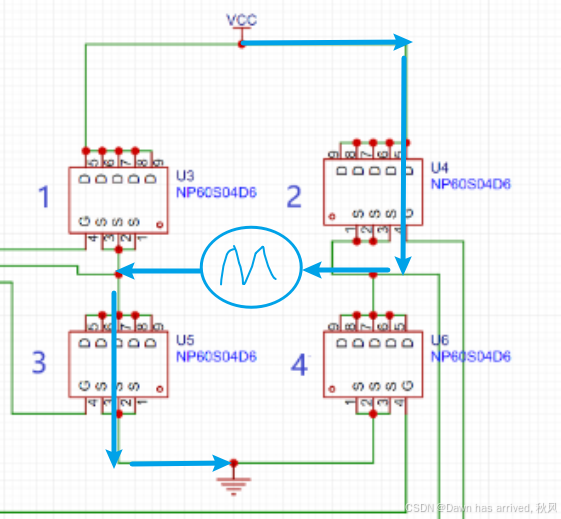
简单来说,14mos管导通23mos截止,电机电流回路如下,假设正转(反转则23导通14截止)。这是启动状态,在停止电机过程中,直接反向的话容易遭成反向电动势过大击穿mos管。所以正常有两种方式完成停止电机这个操作:1.慢速衰减模式(制动) 2.快速衰减模式(滑动)。 在设计过程中,目前厂家大多数会自带寄生二极管,这样大大方便了设计停止电机的控制方案。
1.快速衰减模式(滑动)
一、快速衰减模式(滑动)
- 具体内容:
- 在快速衰减模式中,H桥是被禁止的,此时续流电流会流经体二极管。
- 当电机处于快速衰减模式进行制动时,H桥的所有功率管都关闭,电机线圈中的电流只能由功率管寄生的二极管流过。
- 电机电感上的电流会通过二极管流进供电电源,并在二极管上消耗,因此电流会逐渐减小。
- 作用:
- 使电机以较慢的速度降低其旋转速度,表现为电机滑行。
- 电流的快速衰减导致电机的存储能量逐渐消散,从而使电机向零角速度滑行。
- 优点:
- 电流衰减速度快,能够快速降低电机的旋转速度。
- 功耗相对较低,因为电流主要通过二极管消耗。
- 缺点:
- 制动效果不如慢速衰减模式明显,电机停止时间较长。
- 在某些情况下,可能需要额外的制动装置来辅助停止。
2. 慢速衰减模式(制动)
二、慢速衰减模式(制动)
- 具体内容:
- 在慢速衰减模式中,输出H桥的两个下管都是打开的。
- 当电机处于慢速衰减模式进行制动时,H桥的上下桥功率管关断,但下桥功率管均打开。
- 电机线圈中的电流流向会发生变化,电流逐渐减小到0时,由于惯性作用,电机仍然会继续旋转,产生的反电动势会使电流反向流动,从而产生制动转矩,使电机快速停下。
- 作用:
- 使电机更快地停止旋转,表现为电机制动。
- 尽管电流衰减较慢,但此模式通过产生制动转矩可以更快地降低电机的速度。
- 优点:
- 制动效果明显,电机停止时间短。
- 在需要快速停止电机的场合下非常有用。
- 缺点:
- 电流衰减过程中需要克服电机由于惯性产生的反向电流,因此驱动电流会更大。
- 功耗相对较高,因为需要产生制动转矩来消耗电机的存储能量。
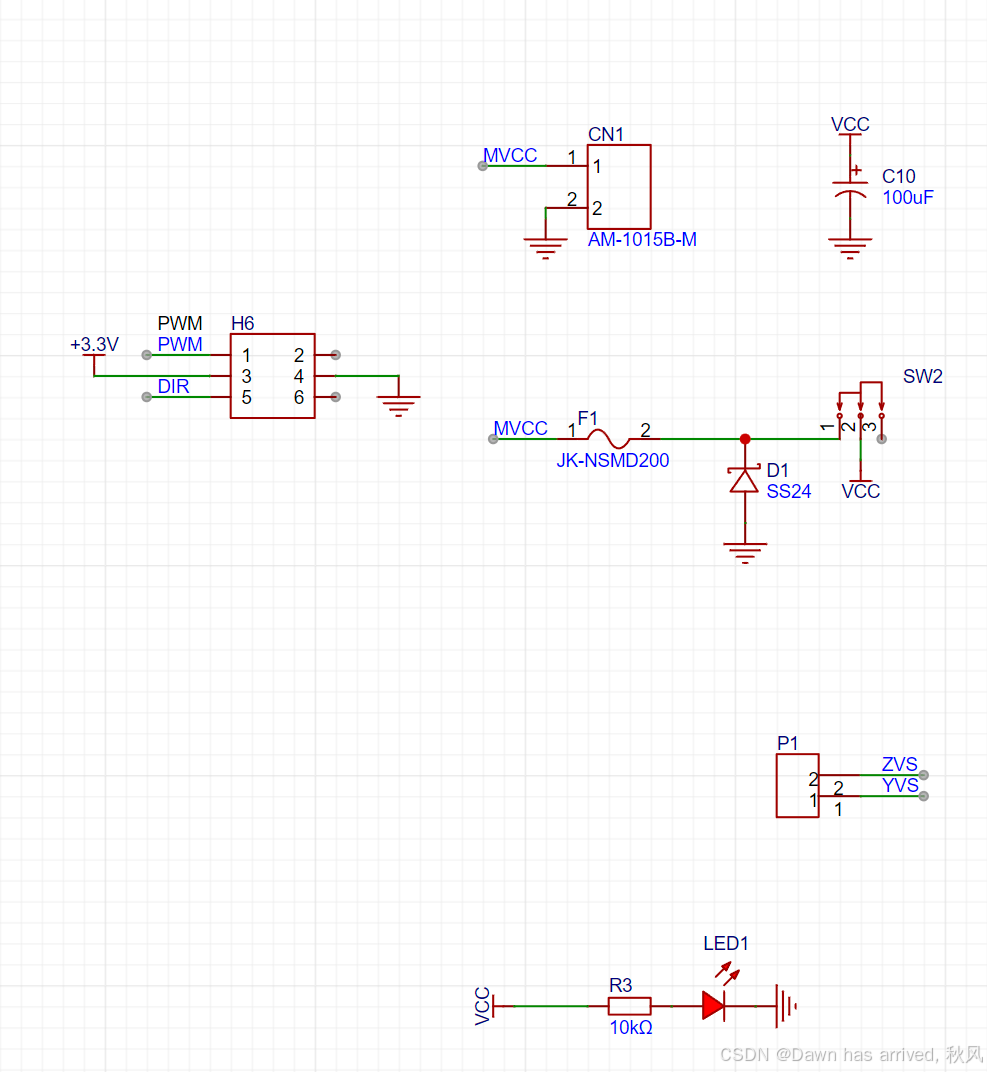
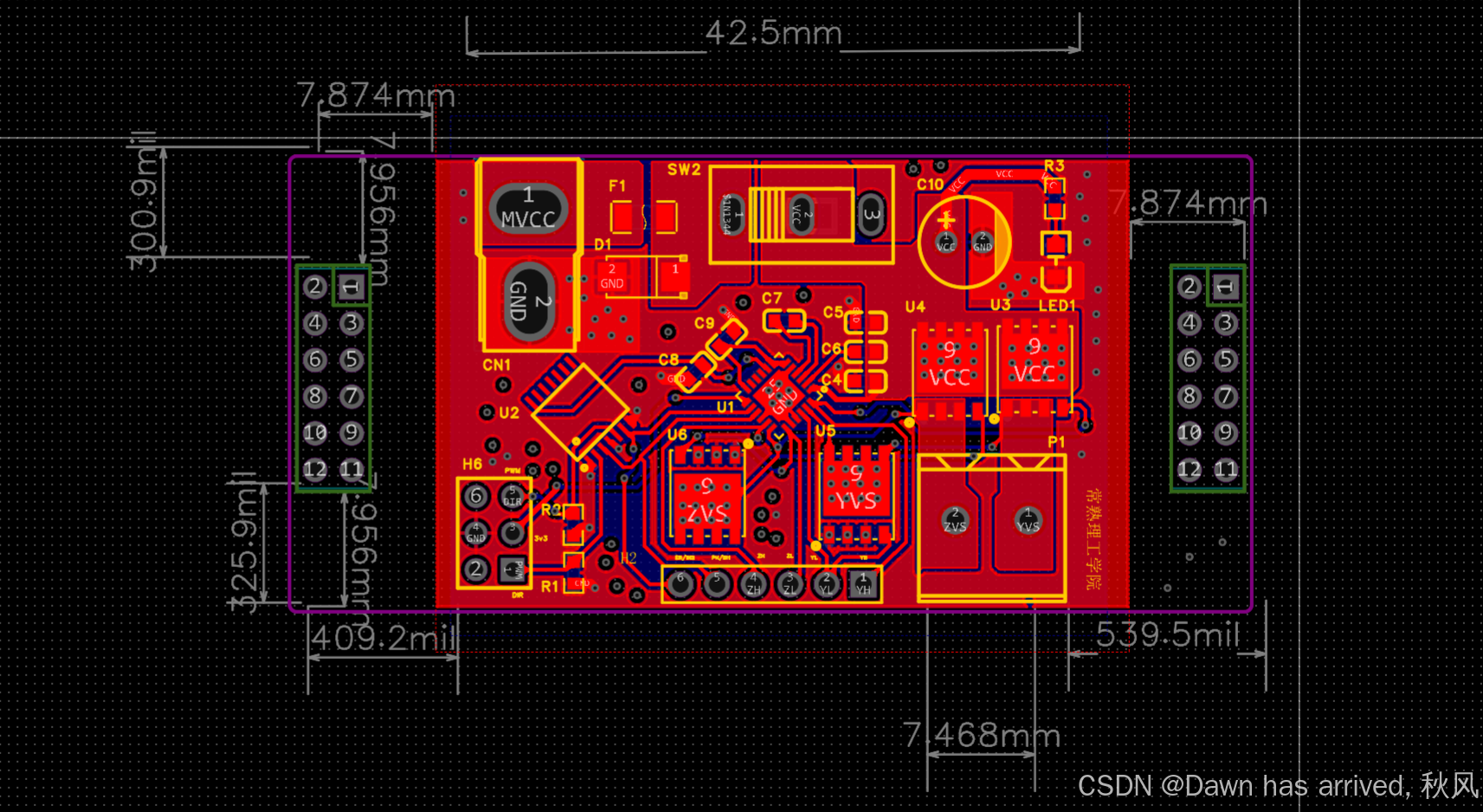
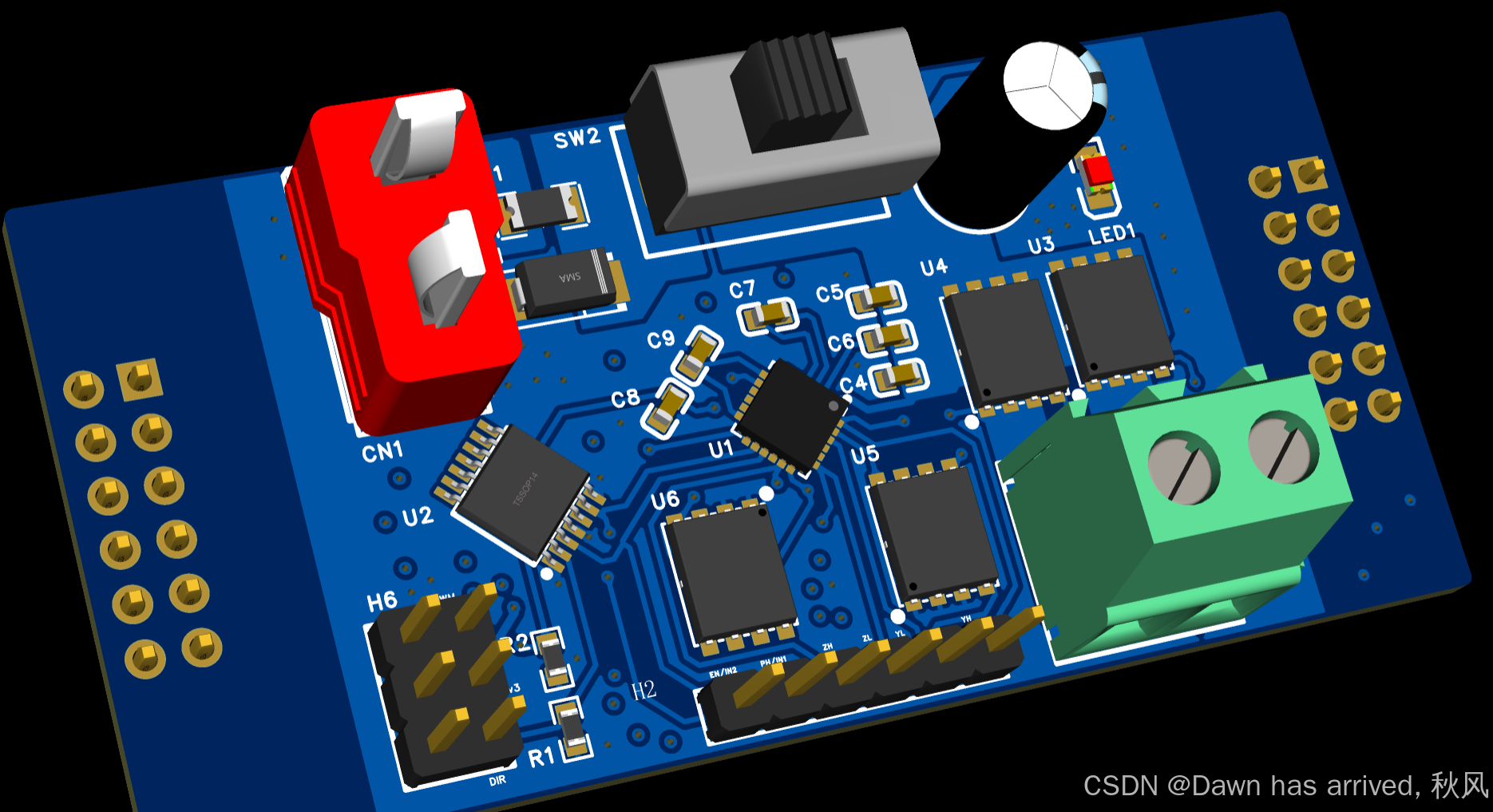
最后,增加排针排母,滤波电路,LED灯指示电路,完成电路的最终设计:
三,总结
本篇文章认识了8701这款直流有刷电机驱动芯片,尽可能完成了全部的设计知识的介绍和硬件电路的展示,并简单了解了H桥的驱动原理和制动方式。图中源文件将会开源在我的github中:GitHub - qiufengsir/DC_motor_drive: 基于德州仪器(TI)DRV8701芯片支持的7.4v-24v直流有刷驱动

















 563
563

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









