







目录
一、前言
本文基于GAN(Generative Adversarial Nets)和CGAN(Conditional Generative Adversarial Nets)两篇论文来阐述二者的不同。
GAN有两篇论文,一篇是2014年发布在arXiv的(linking:https://arxiv.org/pdf/1406.2661.pdf),另一篇稍微新一点,是发布在NeurIPS上的最终版本(linking:https://papers.nips.cc/paper_files/paper/2014/file/5ca3e9b122f61f8f06494c97b1afccf3-Paper.pdf)。这两个版本主要的区别就是两篇论文中Related work是不一样的,arXiv版本的Related work我感觉没有那么related,本文基于NeurIPS版本阐述。
(手机端好像点开会报错)
CGAN:linking:https://arxiv.org/pdf/1411.1784.pdf
二、为什么需要CGAN?
我们都知道GAN是生成对抗网络,可以生成各种图片,但问题就在它生成的图片有很多,也就是很宽泛,但有时候我们需要它生成特定的图片,比如在动物数据集中,我希望它生成猫的图片;0~9数字中,我希望生成9这个数字,甚至是生成一串我输入的特定数字,比如1357。基于这个需求,CGAN应运而生。
那么GAN就从原来的无监督学习“摇身一变”,变成了监督学习CGAN。
而无监督学习和监督学习最大的不同就是,是否有标签(或者说,是否人为地告诉了模型一些规律),所以说,CGAN模型与GAN模型也没有什么不同嘛,不就多加了一个label。但是,就是这一个多了标签的不同,引起了很多东西的不同,落实到代码中去,也会有很多不一样的东西。
三、CGAN在GAN的基础上添加了什么?
(一)生成器G和判别器D的输入
we wish to condition on to both the generator and discriminator.
GAN中生成器G的输入只有噪声z,而在CGAN中生成器G的输入包含噪声z和标签y,也就是说,我们在输入一个noise时,还要额外告诉生成器,这个noise是什么标签的(限制生成器生成图像的范围),比如说,这个噪声是1,这个噪声是2,这个噪声是3,那么生成器就会根据y来生成图像。
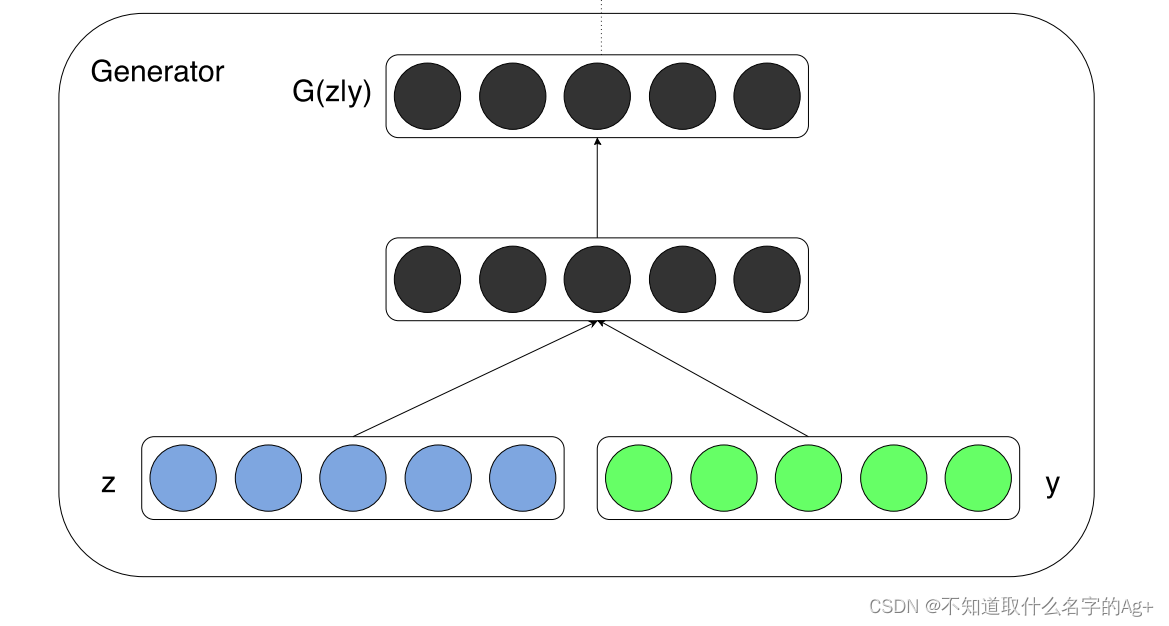
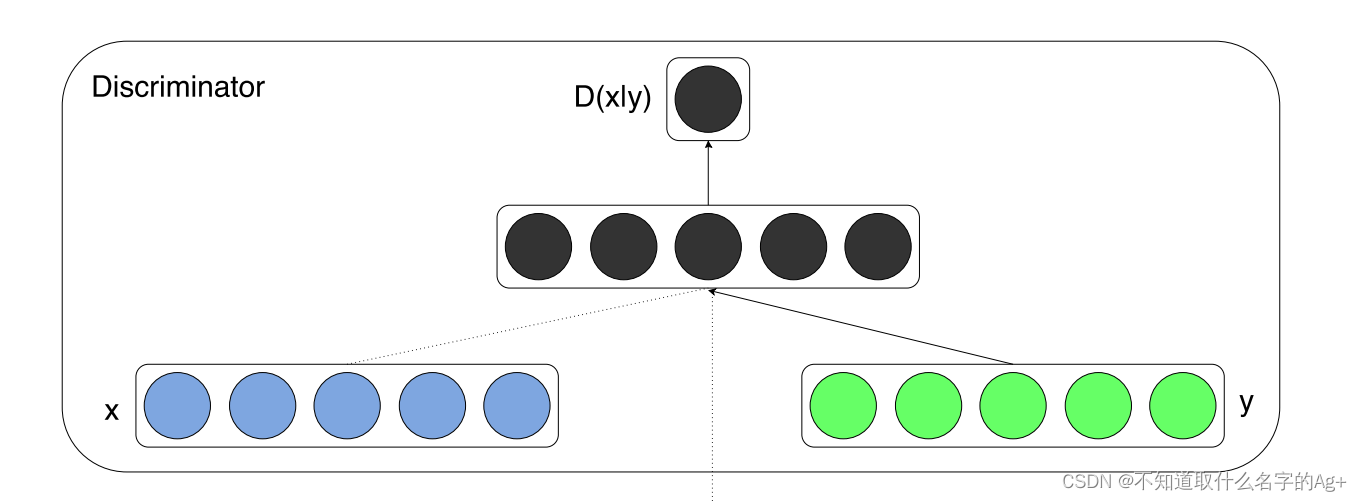
判别器的输入是生成器生成的图像x和标签y(相较于GAN,也是多了一个标签y)。我的理解是,根据提供的标签y,判别器对图像x判别(判断图片x是来自真实的数据集图像还是合成的,大白话解释就是警察D要判断这个嫌疑人x是真的小偷还是悲惨的背锅侠)。
(二)那么标签怎么表示呢?
上文提到标签,可是计算机又看不懂我们人类的语言,那如何将我们的语言转换为计算机的语言?这就涉及到论文中所说的one-hot编码。
We trained a conditional adversarial net on MNIST images conditioned on their class labels, encoded as one-hot vectors.
One-hot Encoding:独热编码,又称一位有效编码,是数据预处理的方法之一。其方法是使用 N位 状态寄存器来对 N个状态 进行编码,每个状态都有它独立的寄存器位,并且在任意时候,其中只有一位有效。
(One-hot Encoding在NLP中更为常见)
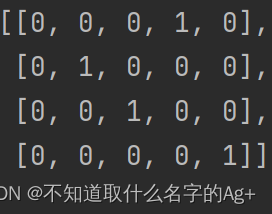
比如数字,我用[1 0 0 0]表示1,[0 1 0 0]表示2,[0 0 1 0]表示3,[0 0 0 1]表示4,那么需要表示3124时,就会是这样一个矩阵(下图),可以利用pytorch中的one_hot()函数进行转换,由于该函数如无自己设定参数则默认以需要编码中的最大的数字(这里是4)+1作为编码长度(4+1=5),所以图片中的编码会比我们刚刚解释的多一列。
由于本文重点在GAN和CGAN上,所以不过多解释one-hot编码(one-hot是个神奇的东西,博大精深)。
推荐文章:https://blog.csdn.net/qq_15192373/article/details/89552498?ops_request_misc=%257B%2522request
(三)损失函数
GAN模型的损失函数是这样的:

而CGAN模型的损失函数是这样:
 发现有什么不一样了吗?
发现有什么不一样了吗?
log()内部的D(x)变成了D(x|y),D(G(Z))变成了D(G(z|y),也就是从普通的概率变成了条件概率。
“条件”,可以理解为限制,我们将损失函数中的普通概率更换成条件概率,也就进一步缩小判断的范围,使得模型不仅是判断是真的图像还是生成的图像,还要判断这个图像是不是当前这个标签y的图像,从而达到conditional。
关于损失函数的理解:
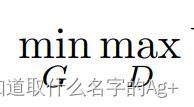
随机掉落的碎片之损失函数不是越小越好吗,不是求最小值吗,为什么这里对G求min,对D求max?
Explanation:
首先,我们需要明确,判别器判断输入图像为真实图像,输出1;判断为生成的图像,则输出0。
(注意:虽然生成器和判别器是同时训练的,但是训练生成器时,函数中不含G的那部分为“常数”,我的表白对象不一样,关注的对象也就不一样,跟我们求偏导的道理是一样的。训练判别器时,同理。)
对于生成器G,它的目的就是骗过判别器D,也就是让判别器判断生成的图片为真实,输出为1。
(小偷要使劲提高自己的话术,让警察D以为他是好人。)
D(G(z|y))趋近1,那么函数中第二部分的log()内部也就趋近于0,对于log而言就是趋近于负无穷。此时由于表白对象是G,函数第一部分为常数,常数减去一个趋于负无穷的数,结果趋近负无穷。所以,想要G的效果越来越好,就要对G求min。
(趁机玩玩MATLAB)
对于判别器D,它的目的就是精确地判断出哪些图像是来自真实数据集的,哪些是来自生成器生成的。跟函数结合起来就是,D(x)要趋近1,D(G(z|y))要趋近0(真实的尽量判断为1,生成的尽量判断为0)。根据log函数的特点,D(x)趋近1,D(G(z|y))趋近0时,整个函数在X轴下方逐渐趋近0,也就是求max值。所以,判别器做得很好时,函数值应为0。
所以根据我们对损失函数的刻板印象,这个似乎不是损失函数,(所以作者在论文中称其为value function,但大家还是习惯模型一定有个损失函数),那我的理解,损失函数本质上是为了使模型效果更好,所以只要模型效果变好(overfitting另说),损失函数不一定是要减小的。
以上就是我在学习两个模型时的一些总结,欢迎大家评论区在评论区补充和指出不足之处,大家一起变得更强!
(以上图片除了l矩阵和og函数图片,其余均来自官方论文)

















 1504
1504

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









