






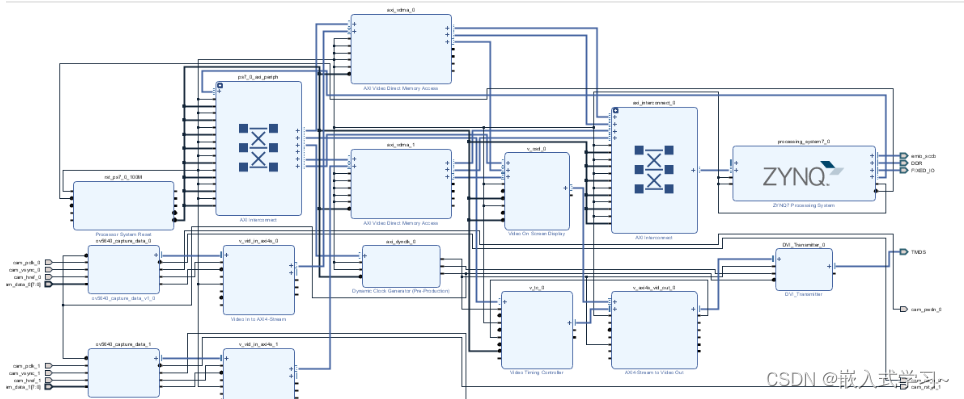
项目框架
本项目使用的开发板为zynq7020,框架为正点原子提供的hdim显示双目摄像头例程,
并在此基础上进行双目视觉处理,最终生成视差图和深度图;
所有双目视觉处理部分均在pl端采用Verilog实现
Census原理
参考文章 https://blog.csdn.net/MyStylee/article/details/78491271
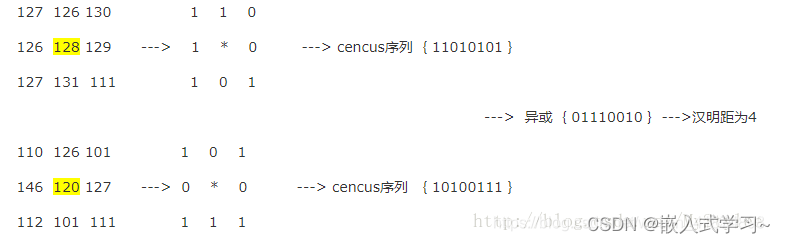
在视图中选取任一点,以该点为中心划出一个例如3 × 3 的矩形,矩形中除中心点之外的每一点都与中心点进行比较,灰度值小于中心点记为1,灰度大于中心点的则记为0,以所得长度为 8 的只有 0 和 1 的序列作为该中心点的 census 序列,即中心像素的灰度值被census 序列替换。经过census变换后的图像使用汉明距离计算相似度,所谓图像匹配就是在匹配图像中找出与参考像素点相似度最高的点,而汉明距正是匹配图像像素与参考像素相似度的度量。具体而言,对于欲求取视差的左右视图,要比较两个视图中两点的相似度,可将此两点的census值逐位进行异或运算,然后计算结果为1 的个数,记为此两点之间的汉明值,汉明值是两点间相似度的一种体现,汉明值愈小,两点相似度愈大实现算法时先异或再统计1的个数即可,汉明距越小即相似度越高。
FPGA实现Census
fpga要实现census首先需要缓存多行数据才能组成矩阵,本项目中采用双端口RAM来进行左右图灰度数据的缓存
//==================================左图缓存部分===================================
//======================= 缓存部分 ==================
reg [9 : 0] addra;
reg [9 : 0] addrb;
wire [9:0] addra_plus2 = addra + 2 ;
//=========== 地址
always@(posedge clk,negedge rst_n)begin
if(~rst_n)begin
addra<=0;
addrb<=0;
end
else if(data_in_valid)begin
//========== a ==========
if(addra == IMG_HDISP-1'b1)
addra<=0;
else
addra<=addra+1'd1;
//========= b ===========
if(addra_plus2 > IMG_HDISP-1'b1)
addrb <= addra_plus2 - IMG_HDISP;
else
addrb <= addra_plus2;
end
end
//=========== 数据 ==============
wire [7:0] linebuffer_in[0:4];
wire [7:0] linebuffer_out[0:4];
assign linebuffer_in[0] = data_in_L;
genvar k ;
generate
for (k=1;k<5;k=k+1)begin
assign linebuffer_in[k] = linebuffer_out[k-1];
end
endgenerate
generate
for (k=0;k<5;k=k+1)begin
blk_mem_gen_0 your_instance_name (
.clka(clk), // input wire clka
.wea(data_in_valid), // input wire [0 : 0] wea
.addra(addra), // input wire [9 : 0] addra
.dina(linebuffer_in[k]), // input wire [7 : 0] dina
.clkb(clk), // input wire clkb
.addrb(addrb), // input wire [9 : 0] addrb
.doutb(linebuffer_out[k]) // output wire [7 : 0] doutb
);
end
endgenerate
上图已左目数据的缓存为例,采用了 5个RAM来生成5*5的窗口来进行census计算,右图同理
由于双端口RAM的乒乓存储操作,输出的地址要比输入的地址+2,如果理解不了可以看下面的波形图

只有输出地址比输入地址多2才能实现数据对齐,数据对齐之后就要取出窗口了
//=============== 取出窗口====================================
reg [7:0] window [4:0][4:0];
integer i,j;
always@(posedge clk,negedge rst_n)begin
if(~rst_n)begin
for(i=0;i<5;i=i+1)begin
for(j=0;j<5;j=j+1)begin
window[i][j]<=0;
end
end
end
else begin
for(i=0;i<5;i=i+1)begin
window[i][0]<=linebuffer_in[i];//需要一个时钟周期
for(j=1;j<5;j=j+1)begin
window[i][j]<=window[i][j-1];
end
end
end
end
窗口的取出是以流水线的形式实现的,故只需要一个时钟周期 ,取出5*5的窗口之后就需要进行census计算了
//====================== Census 计算 ==========================
wire [7:0] center;
reg [24:0] census_vec ;
assign center = window[2][2];
genvar x,y;
generate
for(y=0;y<5;y=y+1)begin
for(x=0;x<5;x=x+1)begin
always@(posedge clk)begin
if(window[y][x] > center )
census_vec[y*5+x] <= 1'b1;需要一个时钟周期
else
census_vec[y*5+x] <= 1'b0;
end
end
end
endgenerate
assign data_out_L = census_vec;
census计算也很简单,上面原理已经介绍过了,计算出的census为25位,也就是说原先8bit的灰度数据被25为的census所代替
输出打拍
由于需要缓存5行数据才能真正输出有效的数据,这个输出打拍来说,需要打的拍太多了,所有只需要考虑核心计算部分,即取出窗口和census计算即可,这样的话输出相对于输入会有5行的偏移,但是左右图都有偏移,而且偏移是相同的故不影响后续汉明距离的计算
//=======输出打拍====//
reg data_out_vaild_d0;
reg data_out_vsync_d0;
reg data_out_clken_d0;
always @(posedge clk or negedge rst_n) begin : proc_data_out_vaild
if(~rst_n) begin
data_out_vaild <= 1'b0;
data_out_vsync <= 1'b0;
data_out_hsync <= 1'b0;
end else begin
//只考虑取出windows和Census 计算 ,故只需要打两拍
data_out_vsync_d0 <= data_in_vsync;//打一拍
data_out_clken_d0 <= data_in_hsync;//打一拍
data_out_vaild_d0 <= data_in_valid;//打一拍
data_out_vsync <= data_out_vsync_d0;//打两拍
data_out_hsync <= data_out_clken_d0;//打两拍
data_out_vaild <= data_out_vaild_d0;//打两拍
end
end
















 3082
3082











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











