






在智能小车项目中,我们通过控制直流电机的正反转、刹车和转速来控制小车的行动。
在这台小车中,对直流电机发出的控制指令来自于Arduino主控板,而Arduino主控板的外部输入则来自于超声波传感器、灰度传感器、遥控器。这篇文章制作的自动跟随小车的Arduino主控板外部输入来自于超声波传感器。
【i·Make】Arduino入门自学,电子学会机器人等级考试三四级,22—自动跟随小车
超声波传感器

超声波传感器是利用超声波的特性的传感器。超声波接收到触发信号后,模块自动发出8个40KHZ的方波,同时开始计时并自动监测是否有信号返回,通过记录超声波从开始发送到接收回波间隔,来判断前方障碍物的距离。

工作电压:5V
有效探测距离:2mm~2.5m
感应角度范围:15°
超声波传感器有四个引脚:GND、VCC、Trig、Echo。
Trig为信号引脚——触发引脚,
Echo为信号引脚——数据接收引脚。
超声波测距

·先向Trig引脚发送时长不小于10μs的高电平,触发超声波模块;
·触发后,模块会自动发射8个40KHZ的方波,并自动检测是否有信号返回;
·如果有信号返回,则通过Echo引脚输出一个高电平,高电平持续的时间是超声波从发射到接收的时间。
计算测试距离
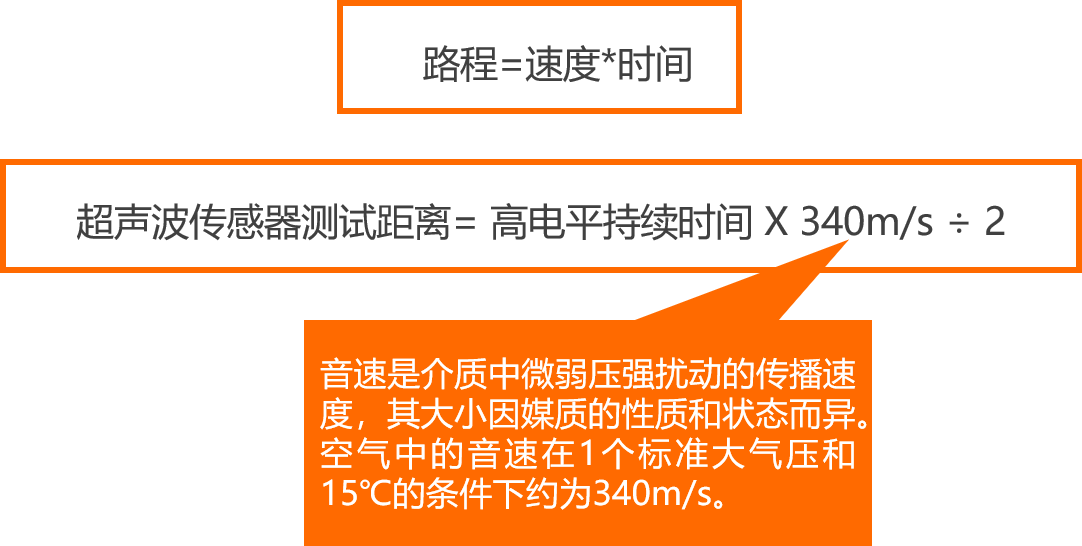
线路连接


超声波传感器接在控制器的#7和#8口,#7口接传感器上的Trig端子,#8口接传感器上的Echo端子。
自动跟随智能小车Mind+程序
通过设置一个反应距离范围,超声波传感器测量的距离只有在此范围内才起作用,其次再设定自动跟随保持距离,当超声波测量的距离超过该距离时,小车前进;当测得值小于该距离时,小车后退。
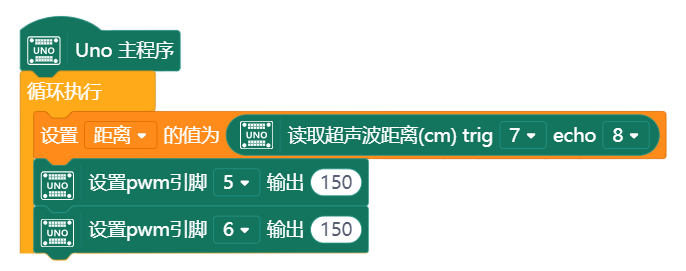
默认初始速度参数pwm值为150,(pwm值低于70,小车可能动不起来)#7口接传感器上的Trig端子,#8口接传感器上的Echo端子。

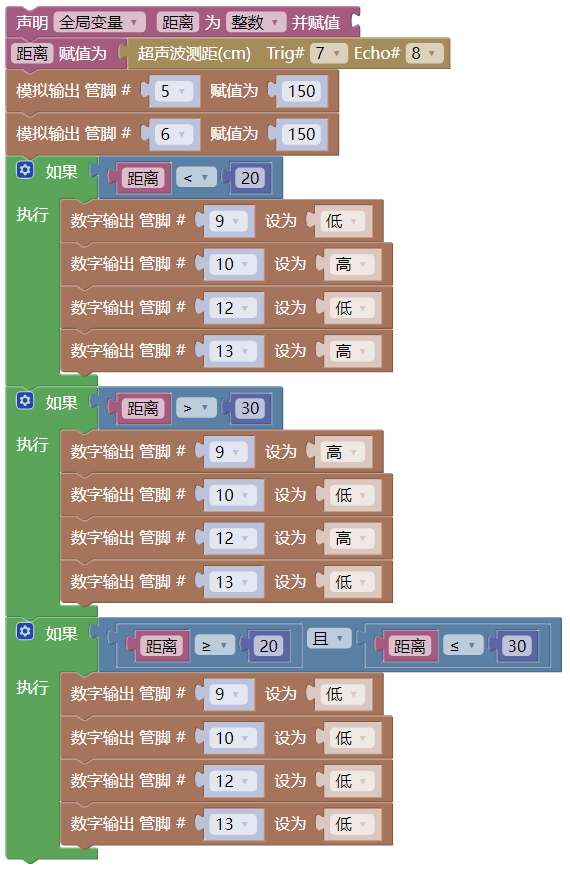
如果检测距离<20公分,小车后退;如果检测距离>30公分,小车前进。

如果检测距离在20~30公分之间,小车停止。这样就能实现一个简单的跟随情景。
自动跟随智能小车Mixly程序














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









