






智能小车将会关于遥控、寻迹、避障的Arduino小车系列,有需要可以进入我的个人头像查看。
在智能小车项目中,我们通过控制直流电机的正反转、刹车和转速来控制小车的行动。
【i·Make】Arduino入门自学,电子学会机器人等级考试三四级,21—红外遥控只能小车
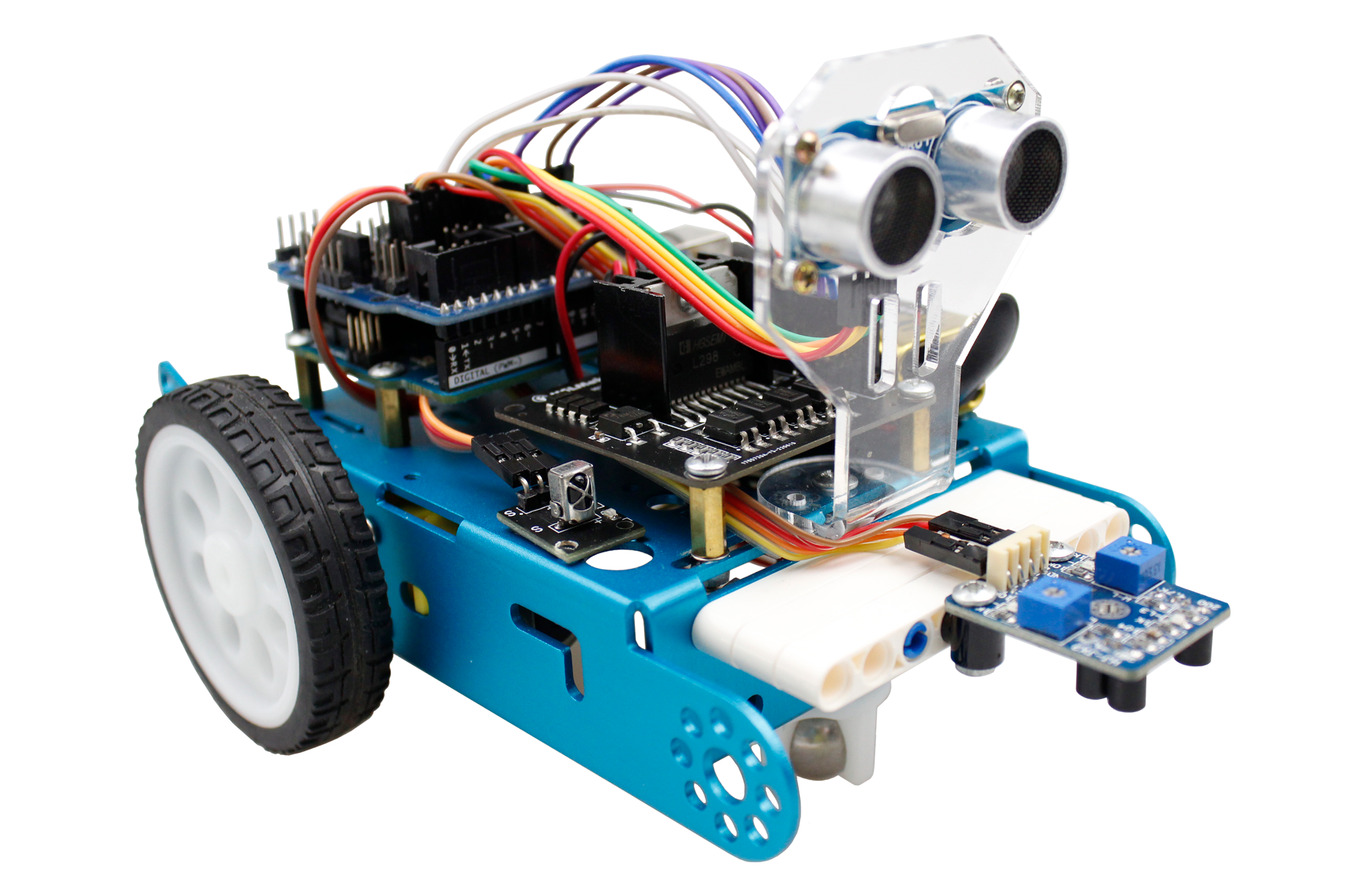
在这台小车中,对直流电机发出的控制指令来自于Arduino主控板,而Arduino主控板的外部输入则来自于超声波传感器、灰度传感器、遥控器。这篇文章我们则讲Arduino主控板的外部输入来自于遥控器。
可以制作红外遥控Arduino智能小车的套件是这套Arduino中级自学套件,套件资料齐全:1>详细地知识点PPT;2>知识点视频讲解;3>硬件电路连接讲解;4>电子元件视频讲解;5>程序讲解(程序逻辑、流程图、程序功能、模块选择、参数调整等);6>有任何不懂的,技术师在线答疑。让任何软、硬件小白都能明白,无困难。
红外通信
红外通信是常用的一种无线通信方式。除了红外通信以外,还有蓝牙、WI-FI等方式。

红外通信是一种利用红外光编码进行数据传输的无线通信方式,是目前使用最广泛的一种通信和遥控手段。红外遥控装置具有体积小。功耗及成本低等特点,因而被广泛使用。日常生活中的电视遥控、空调遥控均使用红外遥控。
红外遥控组件

红外遥控器
红外遥控器上每一个按键都有各自的编码,按下按键后,遥控器就会发送对应编码的红外波。红外遥控器有多种编码方式,最常见的红外遥控器多采用NEC编码。
红外接收器
红外接收模块由红外接收头组成,红外接收头是一个一体化的红外接收电路,包含了红外监测二极管、放大器、滤波器、积分电路、比较器等。其功能是接受红外信号并还原成发射端的波形信号。红外接收器接收38KHZ左右的红外信号。
红外遥控组件
红外遥控组件分别由红外遥控器和红外接收模块两部分组成。
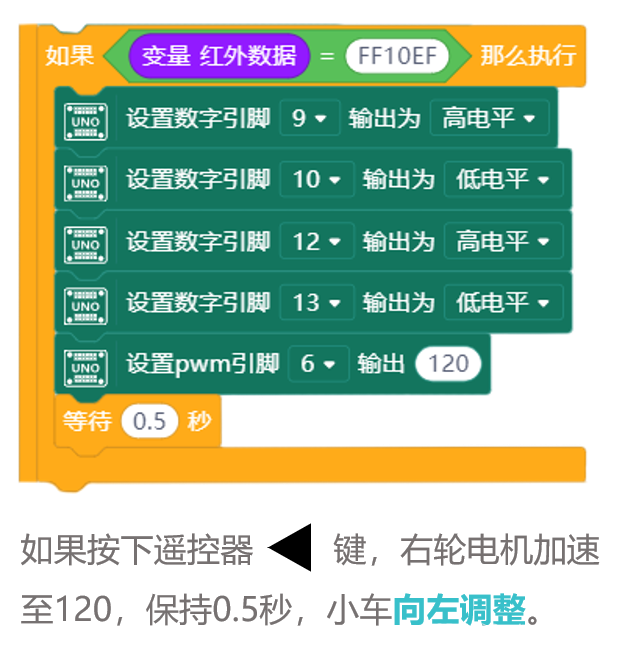
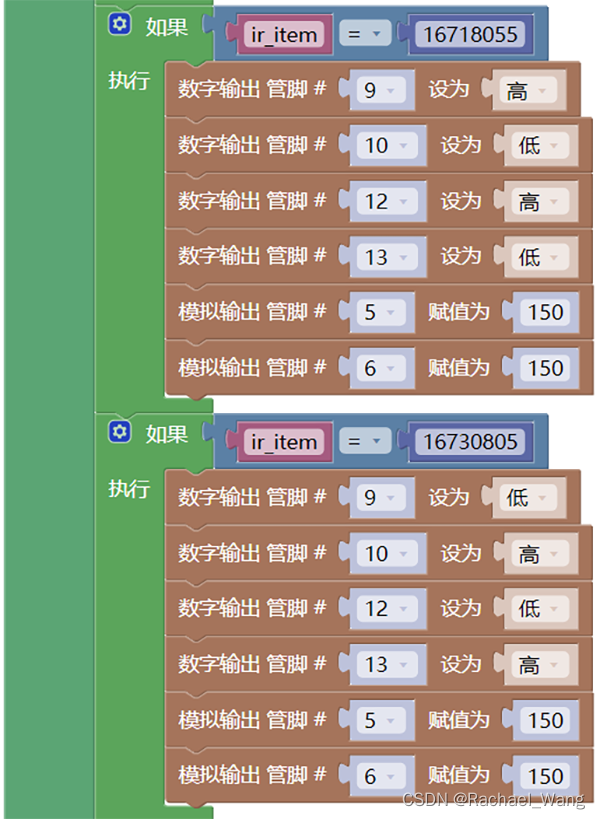
红外遥控器发出信号,红外接收器接收信号,处理后将信号传给Arduino板,由Arduino主控板内的程序根据不同按键的键值,控制程序做出不同的反应。
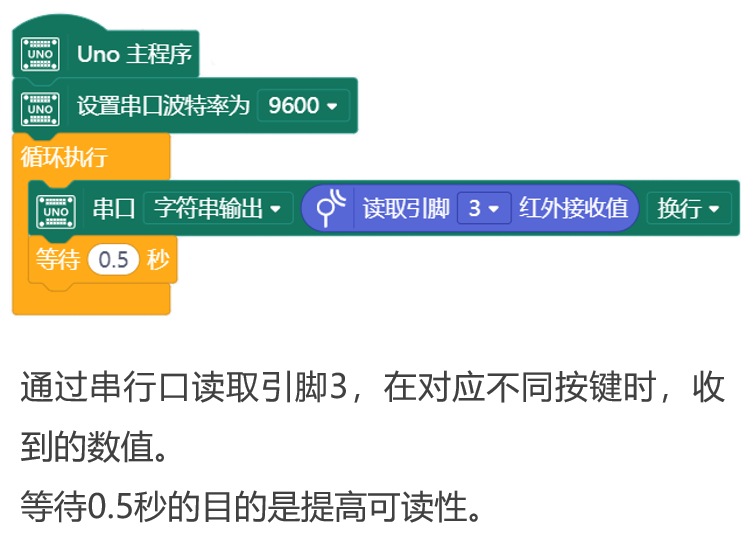
使用Mind+图形化编程软件读取红外遥控器按键的编码值






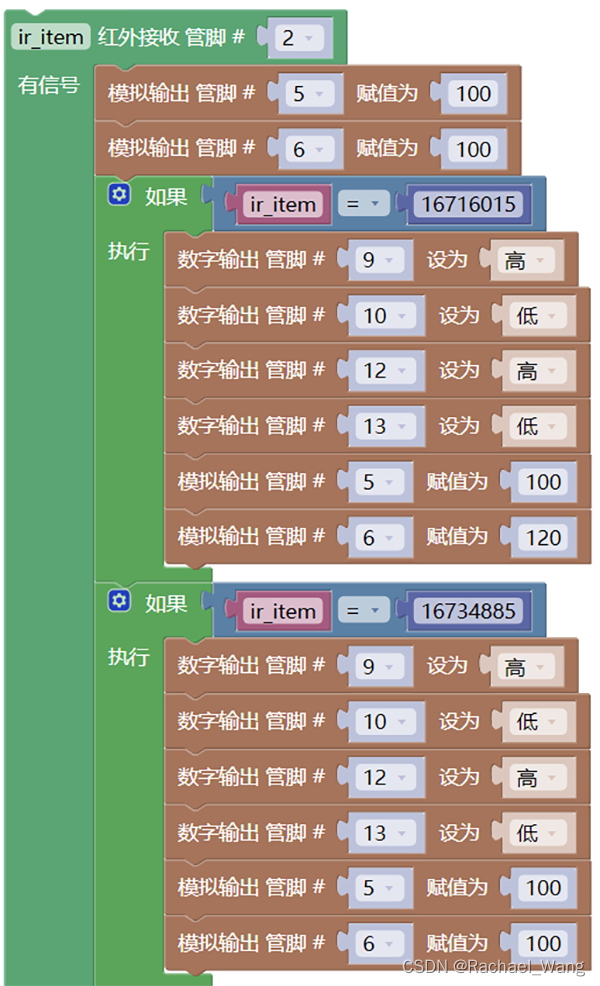
使用米思齐Mixly图形化编程软件读取红外遥控器按键的编码值

智能小车系列还将会出关于巡线、避障、自动跟随的Arduino小车系列,有需要可以进入我的个人头像查看。或者关注我会持续输出一些Arduino、Micro:bit项目或者实验。














 1472
1472











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









