







创建一个工作空间是进行ROS项目实践的第一步。主要根据古月居视频教程整理出来的干货。本人是干货爱好者。
前言
很多初级教程会提供给我们一整个功能包或者工作空间的文件夹,我们只需要去了解和运行即可。但是在学习初期,还是要了解一下基本的创建过程,这样也能更多地了解ROS系统的文件结构。
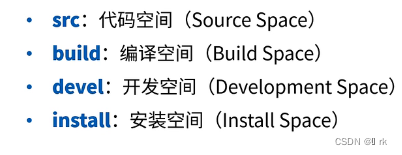
一、工作空间
存放工程开发相关文件的文件夹
二、创建工作空间
1.创建工作空间
mkdir -p ~/catkin_ws_name/src
cd ~/catkin_ws_name/src
catkin_init_workspace
2.编译工作空间
cd ~/catkin_ws
catkin_make
3.设置环境变量
source devel/setup.bash
4.检查环境变量
echo $ROS_PACKAGE_PATH
三、创建功能包
功能包都放在工作空间的src文件夹下。
功能包里有src和Include文件,src里存放代码文件,include存放代码文件需要的头文件等。
另外,功能包中必须有CMakeLists.txt (存储编译规则的文件)和package.xml文件。(包含一些功能包的基本信息和依赖的信息。)
1.创建功能包
cd ~/catkin_ws_name/src
catkin_create_pkg <package_name> [depend] [depend2]
2.编译功能包
cd ~/catkin_ws
catkin_make
3.设置环境变量
source devel/setup.bash
注意
同一个工作空间下,不允许存在同名功能包,不同工作空间下,允许存在同名功能包。
总结
初学者只需简单了解即可,在学习过程中,经常会直接复制一些功能包,而不是完全从0开始写,更重要的是要学会编译和设置环境变量。














 745
745











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









