






四轴scara机器人正解逆解算法,功能有:设定臂长,末端姿态,用户坐标系统及其转换。
不含标定、死区管理,要自己加。
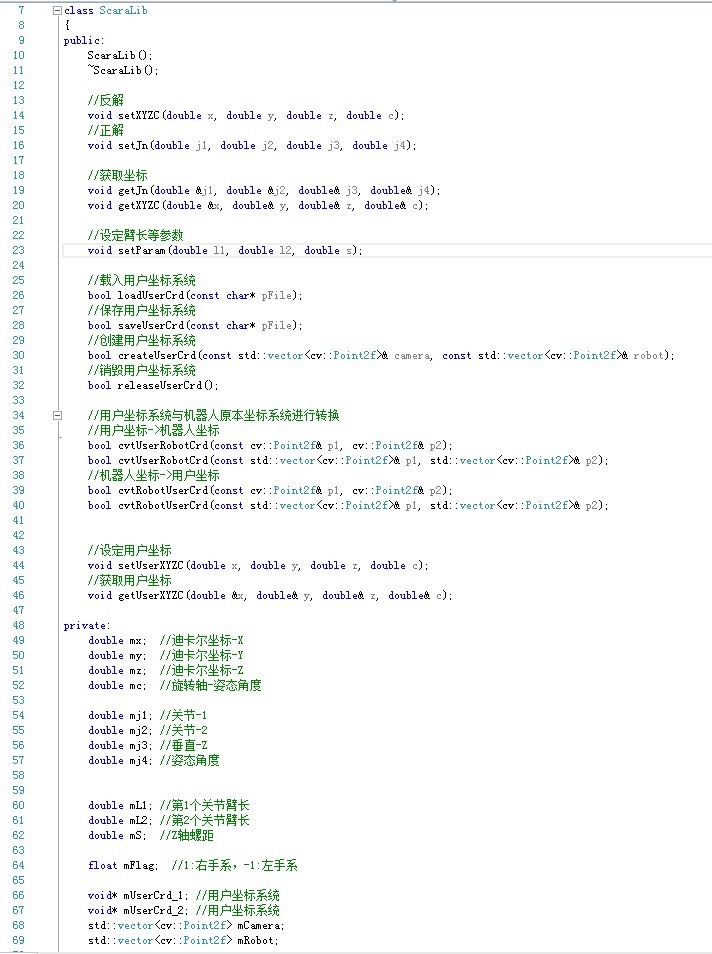
c++源码,vs2015工程,用户坐标系是用opencv库。
支持左手右手两种模式
ID:31100694878064624
视觉工程专家
四轴SCARA机器人正解逆解算法在工业领域中扮演着重要的角色。它主要用于解决机械臂的运动学问题,包括设定臂长、末端姿态、用户坐标系统及其转换等功能。虽然本算法不含标定和死区管理,但可以根据实际需求进行扩展。
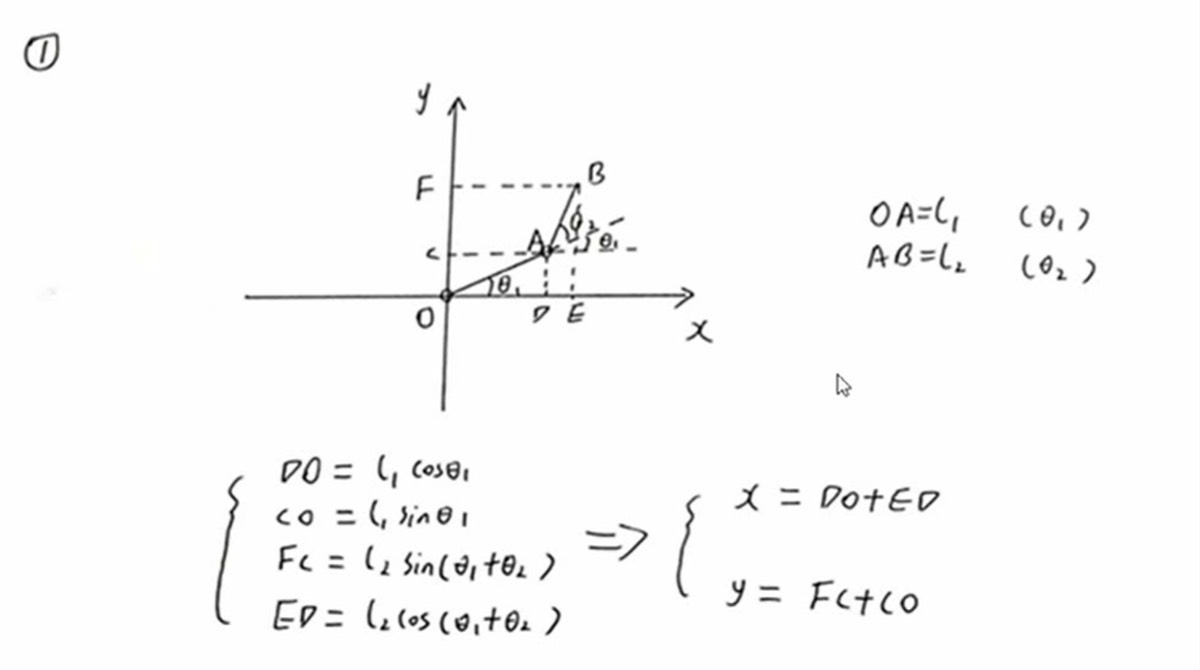
首先,我们需要了解SCARA机器人的基本结构和工作原理。SCARA机器人是一种具有两个旋转自由度和一个平移自由度的串联机器人。它的名称代表了其结构特点,即"Selective Compliance Assembly Robot Arm"。SCARA机器人的运动学正解和逆解问题是实现机械臂精确控制的关键。
在正解问题中,我们需要根据给定的关节变量(设定臂长、末端姿态)计算出机械臂的末端位置。这可以通过使用DH参数和变换矩阵来实现。DH参数是一种描述机械臂关节的方法,通过将机械臂建模为一系列刚体链接,可以准确地计算出末端位置。
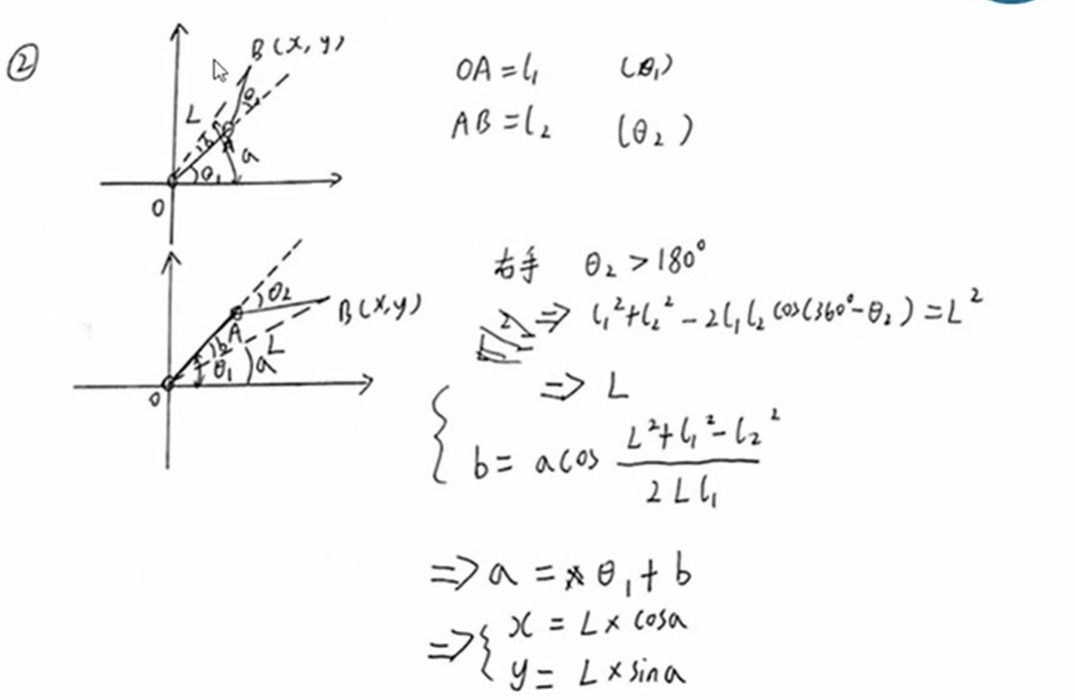
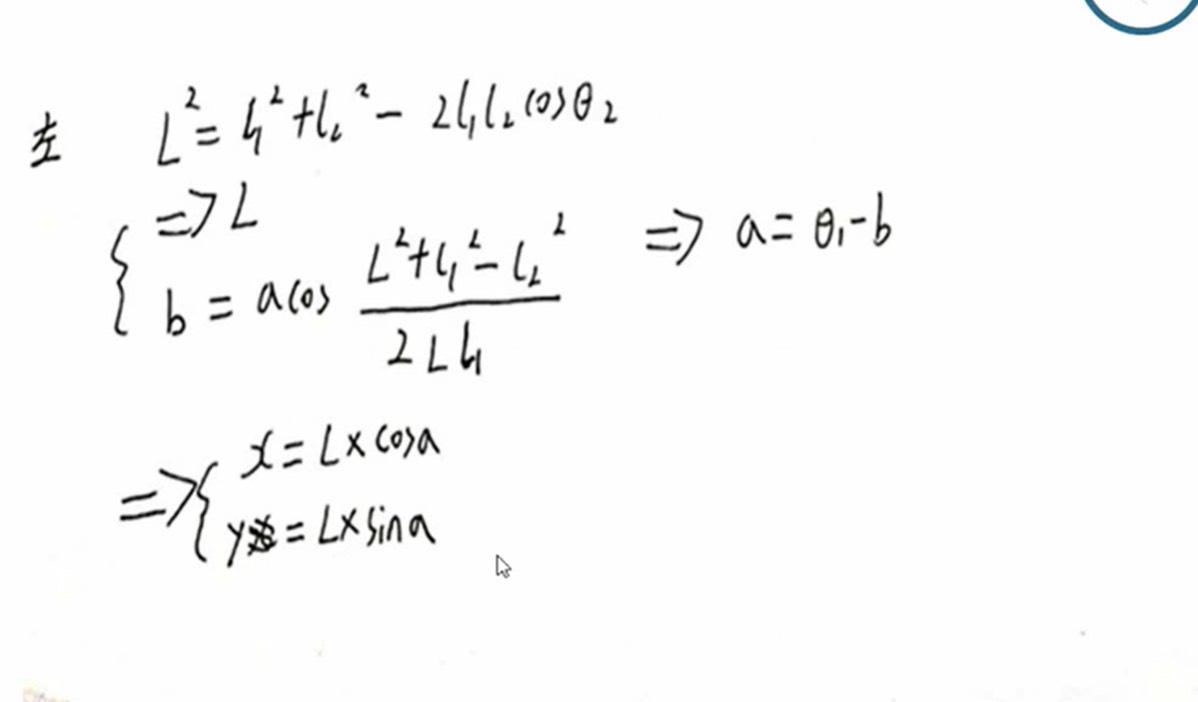
而在逆解问题中,我们需要根据给定的末端位置计算出机械臂的关节变量。这是一种较为复杂的计算过程,需要使用逆运动学算法来解决。可以采用迭代法或闭式解法来求解逆解。迭代法逐步逼近目标解,而闭式解法通过数学公式直接计算出逆解。
本文提供的C++源码实现了四轴SCARA机器人的正解和逆解算法,并以Visual Studio 2015工程的形式呈现。其中,用户坐标系使用了OpenCV库来实现。这样的设计可以方便用户在实际应用中使用和修改。
此外,我们的算法还支持左手和右手两种模式。用户可以根据实际情况选择适合自己的手掌方向,从而更好地满足不同应用场景的需求。
尽管本文提供的算法不包含标定和死区管理功能,但这些功能可以根据具体需求进行扩展。标定可以用于校准机器人的运动学参数,以提高运动精度。而死区管理则可以避免机械臂在边界处出现不稳定的运动情况。
总结起来,本文介绍了四轴SCARA机器人正解逆解算法的设计与实现。通过C++源码和Visual Studio 2015工程的形式呈现,我们可以快速应用到实际工程中。同时,支持左手和右手两种模式,以满足不同用户的需求。虽然不包含标定和死区管理功能,但可以根据实际需求进行扩展。相信本文所提供的算法将为机器人领域的开发者提供有价值的参考和实践基础。
【相关代码,程序地址】:http://fansik.cn/694878064624.html


















 843
843

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









