






 本文探讨了平面在相机坐标系和世界坐标系中的投影转换,特别是如何在计算机视觉中将观察平面上的点映射到球面上。通过设定观察视角和分辨率,对平面进行采样和量化,计算每个点的世界坐标。利用坐标比例关系,实现了从平面到球面的投影算法,并展示了输出效果。调整参数可以影响最终投影的大小。
本文探讨了平面在相机坐标系和世界坐标系中的投影转换,特别是如何在计算机视觉中将观察平面上的点映射到球面上。通过设定观察视角和分辨率,对平面进行采样和量化,计算每个点的世界坐标。利用坐标比例关系,实现了从平面到球面的投影算法,并展示了输出效果。调整参数可以影响最终投影的大小。
平面在球面上的投影
相机的,像素坐标,图像坐标,相机坐标,世界坐标如下示意图,是一个右手坐标系

假设在世界坐标系有一个观察平面,和对应到相机坐标系,像素坐标的示意图。

假定观察者垂直视角宽度为2β,水平视角宽度为2α,初始状态下P0,P1,P2,P3,P4各点坐标如下:

用户需设置显示分辨率(水平分辨率/垂直分辨率),设置完分辨率后,可对世界坐标系中的点 构成的平面进行图像输出,为了求得整个平面上的坐标点在世界坐标系的坐标,需要对每一个坐标点进行换算,由于在cpu里,三角计算,乘法和除法相对于加减运算运行,比较耗时浪费资源。可对 四点间按照 进行等间隔采样,进行量化,求得平面内所有点的世界坐标。
假设设置输出分辨率为800 x 600,则
= |(Px3 – Px1)|/600
= |(Py2 – Py1)|/ 800
Pxn = Px1+ n.
Pyn = Py1+ n.
Pzn = r
最后将平面坐标投影到球面,

公式为啥是这样的,
外切平面与圆交点0,距离半径就是r,
根据r /R比例关系,对x,y,z进行比例计算, 求得圆面坐标。
实现算法
//
double viewAngleDegV = 0;
double viewAngleDegH = 0;
double arfa = 0;
double berta = 0;
viewAngleDegV = 96; //deg
viewAngleDegH = 80; //deg
arfa = (viewAngleDegV /2) *PI/180; //c++ deg
berta = (viewAngleDegH /2) *PI/180; //c++ deg
//
double r = 0; //mm
int w = 0, h = 0;
r = 2000; //mm
w = 480; //pix
h = 480; //pix
if((w % 2) != 0)
w = w -1;
if((h % 2) != 0)
h = h -1;
//
//先用opcv读取一张照片,如果没有opcv,就是自己写读取像素值。
cv::Mat Im0 = cv::imread("E:\\zcb_work\\2113\\pic\\ch1\\left01.jpg", 0);
cv::Mat Im1 = cv::imread("E:\\zcb_work\\2113\\pic\\ch2\\right01.jpg", 0);
if (Im0.empty())
return -1;
if (Im1.empty())
return -1;
printf("++++ open image succesful +++\r\n");
cv::Mat Im2 = cv::Mat::zeros(h, w, CV_8UC1);
cv::Mat Im3 = cv::Mat::zeros(h, w, CV_8UC1);
//
double *Wxyz = (double *)malloc(sizeof(double)* w * h * 3);
double *Cxyz1 = (double *)malloc(sizeof(double)* w * h * 3);
double *Pxy1 = (double *)malloc(sizeof(double)* w * h * 2);
//
double fx1 = 534.10766364;//mm
double fy1 = 534.01052742;//mm
double cx1 = 341.14525437;//mm
double cy1 = 234.85237461;//mm
double fx2 = 537.31809141;//mm
double fy2 = 536.93651045;//mm
double cx2 = 325.99098046;//mm
double cy2 = 250.01009254;//mm
//
double Wxyz0[3], Wxyz1[3], Wxyz2[3], Wxyz3[3], Wxyz4[3];
Wxyz0[0] = 0;
Wxyz0[1] = 0;
Wxyz0[2] = r;
Wxyz1[0] = -r*tan(arfa);//mm
Wxyz1[1] = -r*tan(berta);//mm
Wxyz1[2] = r;//mm
Wxyz2[0] = -r*tan(arfa);//mm
Wxyz2[1] = r*tan(berta);//mm
Wxyz2[2] = r;//mm
Wxyz3[0] = r*tan(arfa);//mm
Wxyz3[1] = -r*tan(berta);//mm
Wxyz3[2] = r;//mm
Wxyz4[0] = r*tan(arfa);//mm
Wxyz4[1] = r*tan(berta);//mm
Wxyz4[2] = r;//mm//mm
//
double dertaX = abs(Wxyz3[0] - Wxyz1[0]) / (w -1);
double dertaY = abs(Wxyz2[1] - Wxyz1[1]) / (h - 1);
double tempx[1200] = { 0 };
double tempy[1200] = { 0 };
//one row world position
{
for (int i = 0; i < w /2;i++)
{
tempx[i] = Wxyz1[0] + i * dertaX;
//printf("+ %d x:%f\r\n",i, tempx[i]);
}
for (int i = w /2; i < w;i++)
{
tempx[i] = Wxyz3[0] - (w-1 -i) * dertaX;
//printf("- %d x:%f\r\n",i, tempx[i]);
}
}
//one col world position
{
for (int i = 0; i < h /2 ;i++)
{
tempy[i] = Wxyz1[1] + i * dertaY;
//printf("+ %d y:%f\r\n",i, tempy[i]);
}
for (int i = h /2; i < h;i++)
{
tempy[i] = Wxyz2[1] - (h-1 -i) * dertaY;
//printf("- %d y:%f\r\n",i, tempy[i]);
}
}
//all world position
{
for(int i = 0; i < h;i++)
{
for(int j = 0; j < w ;j++)
{
//get Wxyz
{
Wxyz[3*(i * w + j) + 0] = tempx[j];
Wxyz[3*(i * w + j) + 1] = tempy[i];
Wxyz[3*(i * w + j) + 2] = r;
}
//gloable Wxyz
double temp = 0;
{
temp = pow(Wxyz[3*(i * w + j) + 0], 2);
temp += pow(Wxyz[3*(i * w + j) + 1], 2);
temp += pow(Wxyz[3*(i * w + j) + 2], 2);
temp = sqrt(temp);
cout << "r: " << r<< " R: " << temp<< endl;
cout << "Wxyz[3*(i * w + j) + 0]: " << Wxyz[3*(i * w + j) + 0]<< " Wxyz[3*(i * w + j) + 1]: " << Wxyz[3*(i * w + j) + 1]<< " Wxyz[3*(i * w + j) + 2]: " << Wxyz[3*(i * w + j) + 2]<< endl;
temp = Wxyz[3*(i * w + j) + 2]/temp;
cout << "r: " << r<< " r/R: " << temp<< endl;
Wxyz[3*(i * w + j) + 0] = Wxyz[3*(i * w + j) + 0] * temp;
Wxyz[3*(i * w + j) + 1] = Wxyz[3*(i * w + j) + 1] * temp;
Wxyz[3*(i * w + j) + 2] = Wxyz[3*(i * w + j) + 2] * temp;
//验证半径是不是等于r,
temp = pow(Wxyz[3*(i * w + j) + 0], 2);
temp += pow(Wxyz[3*(i * w + j) + 1], 2);
temp += pow(Wxyz[3*(i * w + j) + 2], 2);
temp = sqrt(temp);
cout << "r: " << r<< " R': " << temp<< endl;
//和原来平面上的坐标对比
cout << "Wxyz[3*(i * w + j) + 0]: " << Wxyz[3*(i * w + j) + 0]<< " Wxyz[3*(i * w + j) + 1]: " << Wxyz[3*(i * w + j) + 1]<< " Wxyz[3*(i * w + j) + 2]: " << Wxyz[3*(i * w + j) + 2]<< endl;
}
}
}
}
//计算像素坐标
{
int i = 0;
int j = 0;
printf("pic2 camera position\r\n");
for( i = 0; i < h;i++)
{
for( j = 0; j < w ;j++)
{
Cxyz1[3*(i * w + j) + 0] = Wxyz[3*(i * w + j) + 0];
Cxyz1[3*(i * w + j) + 1] = Wxyz[3*(i * w + j) + 1];
Cxyz1[3*(i * w + j) + 2] = Wxyz[3*(i * w + j) + 2] ;
Pxy1[2*(i * w + j) + 0] = (fx1 * Cxyz1[3*(i * w + j) + 0])/ Cxyz1[3*(i * w + j) + 2] +cx1;
Pxy1[2*(i * w + j) + 1] = (fy1 * Cxyz1[3*(i * w + j) + 1])/ Cxyz1[3*(i * w + j) + 2] +cy1;
if((0 < Pxy1[2*(i * w + j) + 0] && Pxy1[2*(i * w + j) + 0]< Im0.cols -1) && (0 < Pxy1[2*(i * w + j) + 1] && Pxy1[2*(i * w + j) + 1]< Im0.rows -1))
{
Im2.at<uchar>(i, j)= Im0.at<uchar>(round(Pxy1[2*(i * w + j) + 1]),round(Pxy1[2*(i * w + j) + 0]));
//printf(" px1:%d,py1:%d", int(Pxy1[i * w + j + 0]), int(Pxy1[i * w + j + 1]));
}
}
}
}
//显示图片
imshow("input image0", Im0);
imshow("output image2", Im2);
cv::waitKey(0);
return 0;
原图
输出后
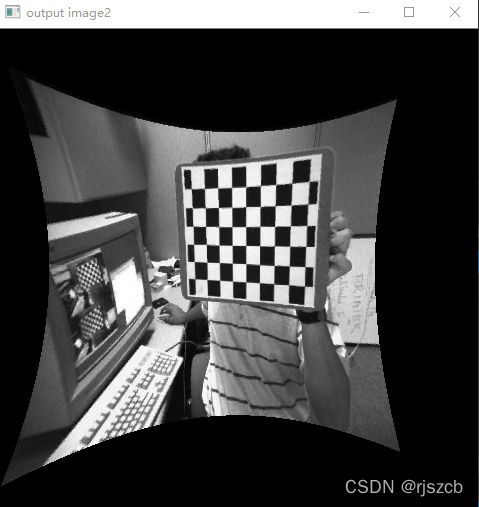
输出的结果大小,可以通过改变w,h的值,和r的值,和h,v的值

















 266
266

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









