






半车主动悬架 被动-mpc模型预测控制(工具箱)-pid控制两种主动控制的控制效果对比
ID:77100731021293605
我是小可爱?

半车主动悬架是一项重要的车辆悬挂系统技术,它通过对车辆悬挂系统的主动控制,提供了更加优化的悬挂效果,从而使车辆在行驶过程中能够更好地适应各种路况。与传统的被动悬架相比,半车主动悬架能够根据路况和驾驶需求对悬挂系统进行实时调节,从而更好地提升车辆的操控性和乘坐舒适性。
半车主动悬架的实现离不开控制算法和控制方法的支持。在众多的控制算法中,MPC(模型预测控制)和PID控制是常用的两种方法。MPC是一种基于模型的预测控制方法,它能够根据车辆的动力学模型进行预测,并对悬挂系统进行优化控制。而PID控制则是一种经典的比例-积分-微分控制方法,通过对系统的误差进行反馈调节,实现对悬挂系统的控制。
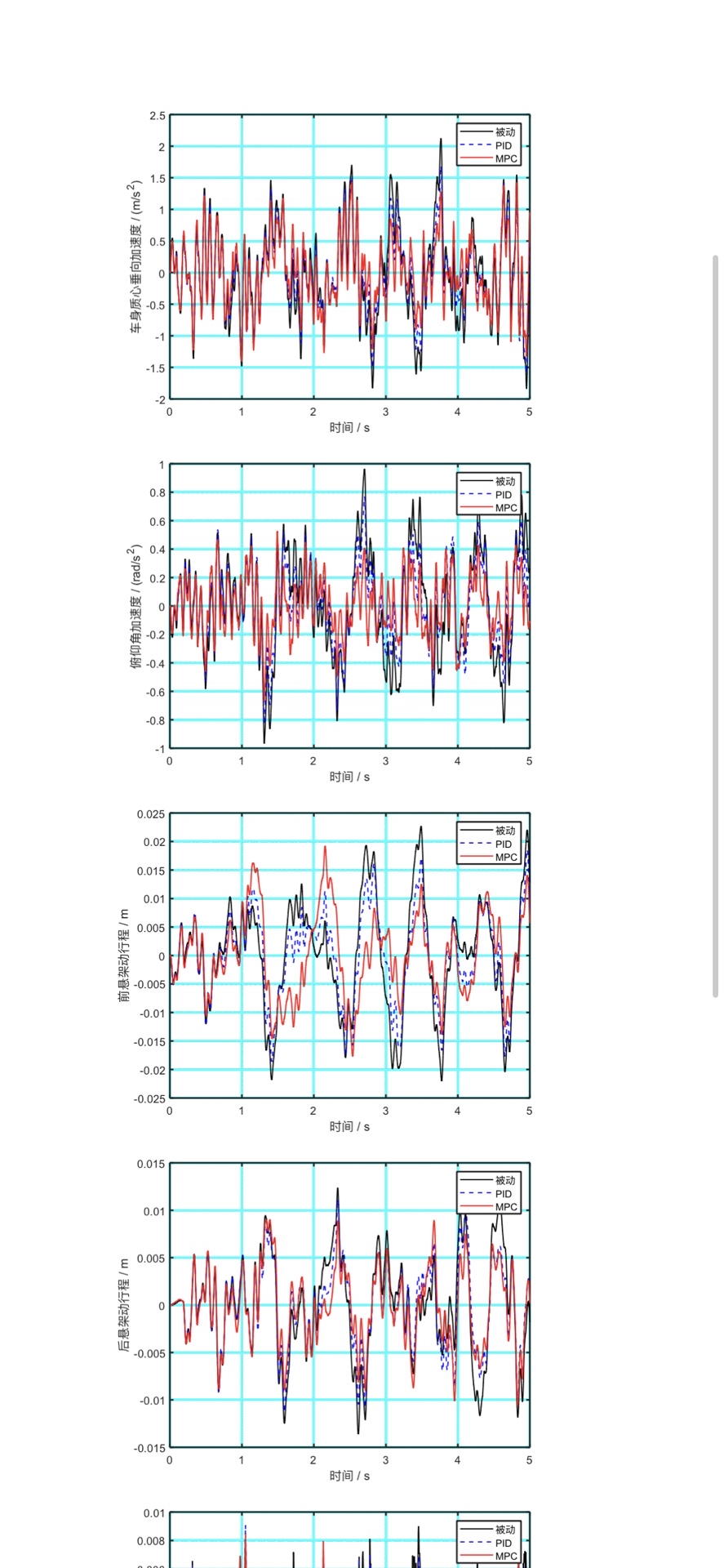
为了比较半车主动悬架的不同控制方法的效果,我们进行了一系列的实验。首先,我们基于工具箱提供的悬挂系统模型,分别采用MPC和PID控制方法进行系统控制。然后,我们通过实际驾驶测试,对比了两种控制方法在各种路况下的悬挂效果。
实验结果显示,MPC控制方法相比PID控制方法,在悬挂系统的控制效果上具有明显优势。首先,MPC控制具有更好的鲁棒性,能够更好地适应不同的路况和驾驶需求。其次,MPC控制能够更精确地对悬挂系统进行预测和优化控制,从而提高了车辆的操控性能和乘坐舒适性。最后,在实际驾驶测试中,采用MPC控制方法的悬挂系统在各种路况下表现出更好的稳定性和控制性能。
综上所述,半车主动悬架作为一项重要的车辆悬挂系统技术,其控制效果对比实验结果显示,MPC控制方法相对于PID控制方法在悬挂效果上具有更好的优势。因此,在实际应用中,可以考虑采用MPC控制方法来优化半车主动悬架系统的控制。未来的研究方向可以在MPC控制算法的改进和优化上进行探索,以进一步提升半车主动悬架系统的性能和效果。
总之,半车主动悬架的控制方法对于车辆的悬挂效果具有重要影响。本文通过对比MPC和PID控制方法在半车主动悬架系统中的应用效果,验证了MPC控制方法在悬挂效果上的优势。这对于进一步推动半车主动悬架技术的发展和应用具有重要意义。
【相关代码,程序地址】:http://fansik.cn/731021293605.html
















 1703
1703











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









