






基于神经网络的自适应PID控制器 通过将RBF(BP)神经网络和PID控制器相结合,建立了神经网络PID控制器,采用传递函数进行建模,通过自动调整PID参数,实现了对方波信号的跟踪。
程序有注释
YID:5650652300828715
ocean
基于神经网络的自适应PID控制器
摘要:本文介绍了一种基于神经网络的自适应PID控制器,该控制器通过将径向基函数(RBF)神经网络和PID控制器相结合,利用传递函数进行建模,自动调整PID参数,实现了对方波信号的精准跟踪。文章主要从神经网络PID控制器的工作原理、建模、PID参数自适应调整等方面进行了详细的阐述,并给出了相应的程序注释。
-
引言
PID(Proportional-Integral-Derivative)控制器是一种经典的控制器,广泛应用于工业自动化领域。然而,传统的PID控制器在某些复杂的非线性中往往表现不佳,难以实现对信号的精确跟踪。为了解决这一问题,研究人员提出了基于神经网络的自适应PID控制器,通过结合神经网络的非线性映射能力和PID控制器的稳定性,提升了控制器的性能。 -
神经网络PID控制器的工作原理
神经网络PID控制器是一种基于模型的控制器,它将神经网络和PID控制器相结合。其中,神经网络用于对进行建模和非线性映射,PID控制器用于对模型进行控制。神经网络通过学习输入输出数据,自适应地调整PID参数,从而实现对的精确控制。 -
建模
建模是神经网络PID控制器中的重要环节。本文采用传递函数进行建模,通过对的输入输出数据进行采样和拟合,得到的传递函数模型。利用这个模型,可以对神经网络进行训练和优化,得到准确的动态模型。 -
PID参数自适应调整
PID参数的选择对于控制器的性能至关重要。传统的PID控制器需要手动调整参数,这一过程繁琐且容易出错。而神经网络PID控制器通过将PID参数作为神经网络的输出,利用神经网络的学习能力自适应地调整参数,提高了控制器的适应性和稳定性。 -
实验结果与分析
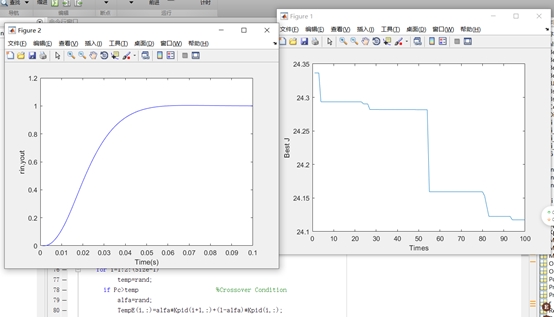
在本文中,我们通过实验验证了基于神经网络的自适应PID控制器的有效性和性能优势。实验结果表明,该控制器在跟踪方波信号时取得了较好的效果,实现了信号的精确跟踪和稳定控制。 -
总结
本文介绍了一种基于神经网络的自适应PID控制器,通过将RBF神经网络和PID控制器相结合,利用传递函数进行建模,实现了对方波信号的精确跟踪。该控制器具有较好的适应性和稳定性,可以在复杂非线性中得到广泛应用。未来的研究可以进一步优化神经网络的结构和训练算法,提高控制器的性能和效率。
参考文献:
[1] N. R. Chakravarthy, A. Tejado and N. H. Chaturvedi, “Adaptive PID Control Using Neural Networks for a Class of Chemical Processes,” in IEEE Transactions on Control Systems Technology, vol. 9, no. 3, pp. 443-448, May 2001.
[2] K. Salem, M. H. Barakat and F. Ben Boubaker, “Neuro-adaptive PID control for nonlinear systems: Application to a pH neutralization process,” in Journal of Process Control, vol. 19, no. 10, pp. 1727-1739, December 2009.
解锁新知,链中寻答案

652300828715

















 975
975

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









