






自抗扰控制的boost电路
ladrc与pi对比
内环自抗扰,外环pi
ID:9660728751423324
warner
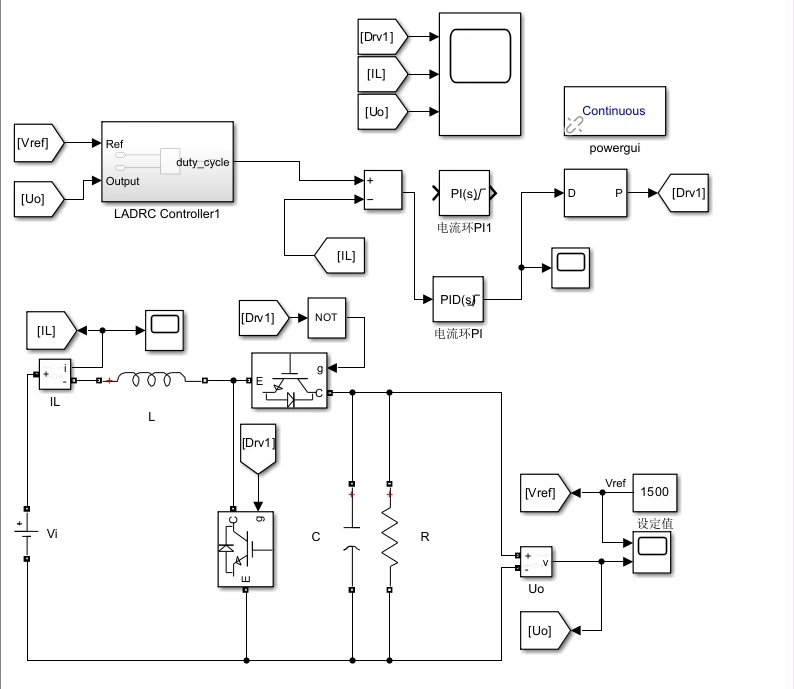
自抗扰控制(Active Disturbance Rejection Control,简称ADRC)技术在控制系统领域中具有较高的应用价值和研究意义。本文将重点讨论ADRC在Boost电路中的应用,与传统的PI控制进行比较,并提出内环自抗扰、外环PI的控制结构。
Boost电路是一种常见的直流-直流(DC-DC)转换器,广泛应用于电源管理、电动车充电器等领域。在Boost电路中,输入电压的波动、负载变化和其他扰动都会对输出电压产生影响,因此设计一个稳定的控制系统至关重要。
传统的PI控制器是最常用的控制策略之一。它通过不断调节输出电流和输出电压之间的误差,使系统达到稳态。然而,PI控制器受到系统模型误差、外部扰动等因素的影响,难以实现精确的控制。
相比之下,ADRC技术利用了自抗扰原理,通过引入扰动观测器和补偿器,能够有效抑制外部扰动对系统的干扰。在Boost电路中,通过将扰动观测器与输出电压进行运算,得到扰动估计值,并利用补偿器对控制信号进行修正,实现了对外部扰动的抵消。
在具体的控制结构上,ADRC采用了内环自抗扰、外环PI的设计思想。内环自抗扰控制器主要用于消除输入电压波动对输出电压的影响,通过估计输入电压的扰动值,并利用补偿器对输入电压进行修正,最终实现对输出电压的稳定控制。外环PI控制器则用于调节输出电流,确保系统的快速响应和稳定性。
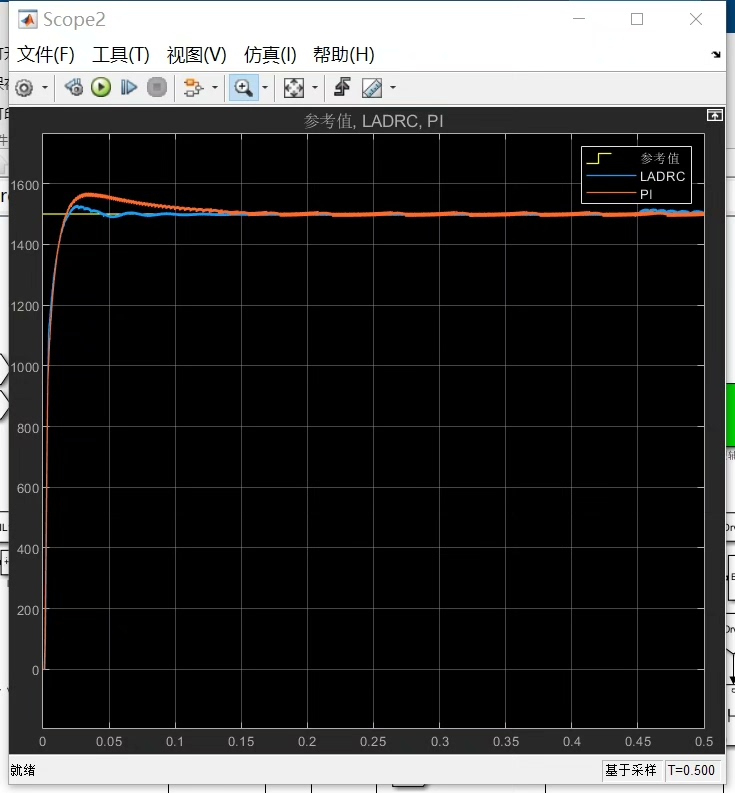
与传统的PI控制相比,内环自抗扰控制能够更好地抵制外部扰动的影响,提高系统的稳定性和鲁棒性。同时,外环PI控制器保证了对输出电流的精确控制,使得系统能够更快地响应负载变化。
在实际应用中,ADRC技术在Boost电路中展现出了显著的优势。通过对比实验和仿真分析,我们可以看到,采用ADRC技术的Boost电路具有更好的稳定性和鲁棒性,能够有效地抑制外部扰动的影响。与传统的PI控制相比,ADRC技术在系统性能方面表现更出色。
综上所述,ADRC技术在Boost电路中的应用具有重要的意义。通过内环自抗扰和外环PI的控制结构,ADRC技术能够有效地抵制外部扰动对系统的干扰,提高系统的稳定性和鲁棒性。在实际应用中,ADRC技术展现出了明显的优势,为Boost电路的控制提供了一种可行的解决方案。
【相关代码,程序地址】:http://fansik.cn/728751423324.html
















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









