







文章目录
一、寻找轮廓findContours()
1.要层次hierarchy
原型
void findContours(
InputArray image,
OutputArrayOfArrays contours,
OutputArray hierarchy,
int mode,
int method,
Point offset=Point()
);
参数
- image:输入图像。必须为8位单通道图像
- contours:轮廓。一般为
vector<vector<Point> > contours;,意思是多个点集,每个点集是一个轮廓,多个点集构成轮廓集。 - hierarchy:层次。一般为
vecotr<Vec4i> hierarchy; - mode:轮廓检索模式
- RETR_EXTERNAL:
- RETR_LIST:
- RETR_CCOMP:
- RETR_TREE :
- method:轮廓的近似方法
- CHAIN_AOOROX_NONE:
- CHAIN_AOOROX_SIMPLE:
- CHAIN_AOOROX_TC89_LI:
- CHAIN_AOOROX_TC89_KCOS:
- offset:每个轮廓点的可选偏移量
例
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
int main()
{
//灰度图
Mat srcImage=imread("M.jpg",0);
//取阈值成二值图
srcImage=srcImage>100;
namedWindow("Threshold119",WINDOW_NORMAL);
imshow("Threshold119",srcImage);
Mat dstImage=Mat::zeros(srcImage.size(),srcImage.type());
vector<vector<Point> > contours;
vector<Vec4i> hierarchy;
findContours(srcImage,contours,hierarchy,RETR_EXTERNAL,CHAIN_APPROX_SIMPLE);
waitKey();
return 0;
}
2.不要层次hierarchy
void findContours(
InputArray image,
OutputArrayOfArrays contours,
int mode,
int method,
Point offset=Point()
);
3.轮廓就是点集
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
Mat src=imread("/home/volume/VSCode/imageSrc/cube.png",0);
Mat point_dst;
point_dst.create(src.rows,src.cols,CV_8UC1);
point_dst=Scalar::all(0);
Mat bounding_dst;
bounding_dst.create(src.rows,src.cols,CV_8UC1);
bounding_dst=Scalar::all(0);
//只绘制一个点集
vector<vector<Point> > contours;
findContours(src,contours,RETR_EXTERNAL,CHAIN_APPROX_SIMPLE);
for(int i=0;i<contours[0].size();i++)
{
//绘制每个点
circle(point_dst,contours[0][i],1,Scalar::all(255));
}
//圈出那个轮廓
RotatedRect rotatedRect=minAreaRect(contours[0]);
Point2f hull[4];
rotatedRect.points(hull);
for(int i=0;i<4;i++)
{
line(bounding_dst,hull[i],hull[(i+1)%4],Scalar::all(255));
}
imshow("src",src);
imshow("point_dst",point_dst);
imshow("bounding_dst",bounding_dst);
waitKey();
return 0;
}

二、绘制轮廓drawContours()
原型
void drawContours(
InputArray image,
OutputArrayOfArrays contours,
int contourIdx,
const Scalar &color,
int thickness=1,
int lineType=8,
InputArray hierarchy=noArray(),
int maxLevel=INT_MAX,
Point offset=Point()
);
参数
- image:输入图像。必须为8位单通道图像。图像必须已经创建。
- contours:轮廓。为findContours()的
vector<vector<Point> > contours; - contourIdx:轮廓绘制的指示变量。如果为负值,则绘制所有轮廓
- color:轮廓的颜色
- thickness:轮廓线条的粗细度
- lineType:轮廓线条的类型
- hierarchy:层次结构信息
- maxLevel:表示用于绘制轮廓的最大等级
- offset:每个轮廓点的可选偏移量
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
# define WINDOW_NAME "Effect"
Mat g_srcImage;
vector<vector<Point> > g_contours;
vector<Vec4i> g_hierarchy;
int g_threshValue=80;
int g_threshValueMax=255;
void onChange(int,void*)
{
//取阈值成二值图
g_srcImage=g_srcImage>g_threshValue;
namedWindow(WINDOW_NAME,WINDOW_NORMAL);
imshow(WINDOW_NAME,g_srcImage);
Mat dstImage=Mat::zeros(g_srcImage.size(),g_srcImage.type());
namedWindow("dstImage",WINDOW_NORMAL);
findContours(g_srcImage,g_contours,g_hierarchy,RETR_TREE,CHAIN_APPROX_SIMPLE);
for(int index=0;index<g_contours.size();index++)
{
Scalar color(rand()&255,rand()&255,rand()&255);
drawContours(dstImage,g_contours,index,color,FILLED,8,g_hierarchy);
imshow("dstImage",dstImage);
waitKey(1);
}
}
int main()
{
//灰度图
g_srcImage=imread("t.jpg",0);
namedWindow(WINDOW_NAME,WINDOW_NORMAL);
imshow(WINDOW_NAME,g_srcImage);
createTrackbar("Threshold",WINDOW_NAME,&g_threshValue,g_threshValueMax,onChange);
onChange(0,0);
waitKey();
return 0;
}
三、寻找凸包
原型
void convexHull(
InputArray points,
OutputArray hull,
bool clockkwise=false,
bool returnPoints=true
)
参数
- points:输入的二维点集。可以是Mat类,也可以是vector容器
- hull:找到的凸包。凸包的数据其实是下标。
- clockkwise:操作方向标识符。真为顺时针,假为逆时针(默认)。并且坐标系是x指右,y指上
- returnPoints:操作标识符。真为返回各凸包的各个点(默认),假为返回凸包各点的指数。当hull是vector时,此标志被忽略。
绘制点的凸包
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
#define W_CONVEX "convexHull"
int main()
{
Mat image=Mat::zeros(600,600,CV_8UC3);
//初始化rng
RNG& rng=theRNG();
while(1)
{
char key;
//获得一个3到103的数量
int count=(unsigned)rng%100+3;
vector<Point> points;
for(int i=0;i<count;i++)
{
Point point;
//在1/4到3/4区域内的正态分布点
point.x=rng.uniform(image.cols/4,image.cols*3/4);
point.y=rng.uniform(image.rows/4,image.rows*3/4);
points.push_back(point);
}
//圈出要绘制的点
for(int i=0;i<count;i++)
{
circle(image,points[i],3,Scalar::all(150),5);
}
//寻找凸包
vector<int> hull;
//凸包内数据其实是凸包的点points的下标
convexHull(Mat(points),hull);
//用连线表示凸包
for(int i=0;i<hull.size();i++)
{
//从上一个点到下一个点
line(image,points[hull[i]],points[hull[(i+1)%hull.size()]],Scalar::all(255),2);
}
namedWindow(W_CONVEX,WINDOW_NORMAL);
imshow(W_CONVEX,image);
//图像重新变成全黑的
image=Scalar::all(0);
if(waitKey()=='q') return 0;
}
return 0;
}

四、使用多边形
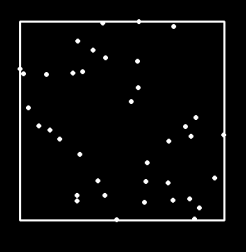
1.外部矩形边界boundingRect()
原型
Rect boundingRect(InputArray points)
参数
points:Mat类或者是std::vector二维点集
例子
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
#define W_CONVEX "RESULT"
int main()
{
Mat image=Mat::zeros(600,600,CV_8UC3);
//初始化rng
RNG& rng=theRNG();
while(1)
{
char key;
//获得一个3到103的数量
int count=(unsigned)rng%100+3;
vector<Point> points;
for(int i=0;i<count;i++)
{
Point point;
//在1/4到3/4区域内的正态分布点
point.x=rng.uniform(image.cols/4,image.cols*3/4);
point.y=rng.uniform(image.rows/4,image.rows*3/4);
circle(image,point,2,Scalar::all(255),2);
points.push_back(point);
}
Rect rect=boundingRect(points);
vector<Point> hull{rect.tl(),Point(rect.x+rect.width,rect.y),rect.br(),Point(rect.x,rect.y+rect.height)};
for(int i=0;i<4;i++)
{
line(image,hull[i],hull[(i+1)%4],Scalar::all(255),2);
}
namedWindow(W_CONVEX,WINDOW_NORMAL);
imshow(W_CONVEX,image);
//图像重新变成全黑的
image=Scalar::all(0);
if(waitKey()=='q') return 0;
}
return 0;
}
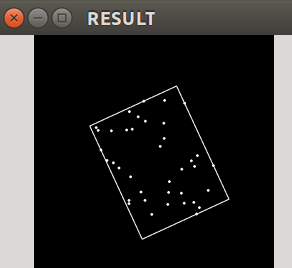
2.寻找最小包围矩形minAreaRect()
原型
RotateRect minAreaRect(InputArray points)
参数
points:Mat类或者是std::vector二维点集
返回一个包围点的RotatedRect
例子:
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
#define W_CONVEX "RESULT"
int main()
{
Mat image=Mat::zeros(600,600,CV_8UC3);
//初始化rng
RNG& rng=theRNG();
while(1)
{
char key;
//获得一个3到103的数量
int count=(unsigned)rng%100+3;
vector<Point> points;
for(int i=0;i<count;i++)
{
Point point;
//在1/4到3/4区域内的正态分布点
point.x=rng.uniform(image.cols/4,image.cols*3/4);
point.y=rng.uniform(image.rows/4,image.rows*3/4);
circle(image,point,2,Scalar::all(255),2);
points.push_back(point);
}
RotatedRect rect=minAreaRect(points);
Point2f hull[4];
rect.points(hull);
for(int i=0;i<4;i++)
{
line(image,hull[i],hull[(i+1)%4],Scalar::all(255),2);
}
namedWindow(W_CONVEX,WINDOW_NORMAL);
imshow(W_CONVEX,image);
//图像重新变成全黑的
image=Scalar::all(0);
if(waitKey()=='q') return 0;
}
return 0;
}
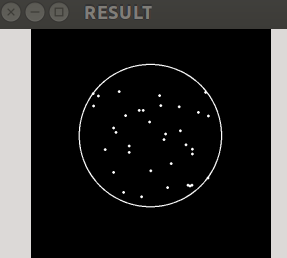
3.寻找最小包围圆形minEnclosingCircle()
原型
void minEnclosingCircle(
InputArray points,
Point2f& center,
float& radius
);
参数
- points:Mat类或者是std::vector二维点集
- center:圆心位置
- radius:圆的半径
例子:
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
#define W_CONVEX "RESULT"
int main()
{
Mat image=Mat::zeros(600,600,CV_8UC3);
//初始化rng
RNG& rng=theRNG();
while(1)
{
char key;
//获得一个3到103的数量
int count=(unsigned)rng%100+3;
vector<Point> points;
for(int i=0;i<count;i++)
{
Point point;
//在1/4到3/4区域内的正态分布点
point.x=rng.uniform(image.cols/4,image.cols*3/4);
point.y=rng.uniform(image.rows/4,image.rows*3/4);
circle(image,point,2,Scalar::all(255),2);
points.push_back(point);
}
Point2f center;
float radius;
minEnclosingCircle(points,center,radius);
circle(image,center,radius,Scalar::all(255),2);
namedWindow(W_CONVEX,WINDOW_NORMAL);
imshow(W_CONVEX,image);
//图像重新变成全黑的
image=Scalar::all(0);
if(waitKey()=='q') return 0;
}
return 0;
}
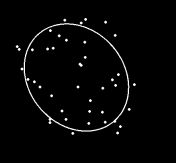
4.用椭圆拟合二维点集fitEllipse()
原型
RotateRect fitEllipse(InputArray points)
注意:点集points内点的个数必须大于等于5个。
参数
points:Mat类或者是std::vector二维点集
例子
#include<opencv2/opencv.hpp>
using namespace std;
using namespace cv;
#define W_CONVEX "RESULT"
int main()
{
Mat image=Mat::zeros(600,600,CV_8UC3);
//初始化rng
RNG& rng=theRNG();
while(1)
{
char key;
//获得一个3到103的数量
int count=(unsigned)rng%100+3;
vector<Point> points;
for(int i=0;i<count;i++)
{
Point point;
//在1/4到3/4区域内的正态分布点
point.x=rng.uniform(image.cols/4,image.cols*3/4);
point.y=rng.uniform(image.rows/4,image.rows*3/4);
circle(image,point,2,Scalar::all(255),2);
points.push_back(point);
}
if(count<5) continue;
RotatedRect fitRect=fitEllipse(points);
ellipse(image,fitRect,Scalar::all(255),2);
namedWindow(W_CONVEX,WINDOW_NORMAL);
imshow(W_CONVEX,image);
//图像重新变成全黑的
image=Scalar::all(0);
if(waitKey()=='q') return 0;
}
return 0;
}
5.逼近多边形曲线approxPolyDP()
原型
void approxPolyDP(
InputArray curve,
OutputArray approxCurve,
double epsilon,
bool closed
)
参数
- points:Mat类或者是std::vector二维点集
- approxCurve:多边形逼近的结果,类型和points一致
- epsilon:逼近的精度
- closed:真为封闭曲线(第一个和最后一个顶点相连),假为不封闭。
例子
五、其他
1.测量点是否在其中pointPolygonTest()
原型
double pointPolygonTest(
InputArray contour,
Point2f pt,
bool measureDist
);
参数
- contour:
findContours()获得的轮廓 - pt:点
- measureDist:决定返回值的类型。
- 当为
true时,返回pt点距离轮廓中与其最近的点的距离。 - 当为
false时,返回+1、0或-1
- 当为
- 返回值:返回判断结果
- 在其中inside:正值
- 在边上edge:0值
- 在外边:负值
例
#include<iostream>
#include<opencv2/opencv.hpp>
using namespace cv;
using namespace std;
int main()
{
Mat src=imread("/home/volume/VSCode/imageSrc/cube.png",0);
vector<vector<Point> > contours;
findContours(src,contours,RETR_EXTERNAL,CHAIN_APPROX_SIMPLE);
cout<<pointPolygonTest(contours[0],Point2f(1,1),true)<<endl;
//-196.471
cout<<pointPolygonTest(contours[0],Point2f(1,1),false)<<endl;
//-1
cout<<pointPolygonTest(contours[0],contours[0][0],true)<<endl;
//-0
cout<<(pointPolygonTest(contours[0],contours[0][0],true)==0)<<endl;
//1,看来-0也是等于0的。
cout<<pointPolygonTest(contours[0],contours[0][0],false)<<endl;
//0
return 0;
}















 8096
8096











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









