







 本文介绍了传感器噪声的类型,包括随机噪声和空间噪声,并探讨了噪声的来源,如光子噪声和读出噪声。针对噪声问题,提出了改善信噪比SNR的策略,如增加曝光时间、多帧图像平均、Binning技术、使用高量子效率的传感器和增大像素尺寸。通过这些方法,可以在低光照条件下提高摄像头的表现力和图像质量。
本文介绍了传感器噪声的类型,包括随机噪声和空间噪声,并探讨了噪声的来源,如光子噪声和读出噪声。针对噪声问题,提出了改善信噪比SNR的策略,如增加曝光时间、多帧图像平均、Binning技术、使用高量子效率的传感器和增大像素尺寸。通过这些方法,可以在低光照条件下提高摄像头的表现力和图像质量。
目录
空间噪声(模式噪声 pattern noise,非均匀噪声non-uniformity noise)
内容为学习记录,大部分从网上摘抄的。
以下来自:(4条消息) 摄像头参数介绍 ———— 信噪比(SNR)_相机信噪比_菜鸡小詹的博客-CSDN博客
信噪比:SNR,狭义来讲是指放大器的输出信号的功率与同时输出的噪声功率的比。摄像机的信噪比越高,干扰噪点对画面的影响就越小。
当摄像机摄取较亮场景时,监视器显示的画面通常比较明快,观察者不易看出画面中的干扰噪点;而当摄取较暗景时,监视器显示的画面就比较昏暗,此时很容易看到画面中雪花状的干扰噪点。
改善信噪比SNR:
1、增加曝光时间可以增加信噪比,使图像清晰。
2、多帧图像平均,在光线比较暗的情况下,用手机拍照时实际会记录下多张图像,算法会将这些图像做对齐、融合,形成一张图像。这样做相当于延长了曝光时间,使得感光元器件接收到了更多的光子,增加了信噪比,同时又不会因为相机和曝光时间过长而导致图像模糊。如果对四张图像做对齐融合,则相当于每个像素多采集到了四倍数量的光子,换算成信噪比有6分贝的提升。
3、Binning是将相邻像元(相同颜色)感应的电荷加在一起,以一个像素的模式读出。
在环境光照低的情况下,提高摄像头表现力。
像素合并模式,一种方式是将相邻的像素单元电荷通过物理的方法叠加在一起作为一个像素输出信号;另一种方式是将相邻像素单元电荷叠加之后进行平均再作为一个像素进行输出。这两种方式都可以提高sensor的信噪比。当sensor的模拟数据混进的噪声比较小时,我们可以在图像后处理阶段设置更高的增益,这样就有机会在低照度下获取较高质量的图像。
Binning是一种图像读出模式,将相邻的像元中感应的电荷被加在一起,以一个像素的模式读出。Binning分为水平方向Binning和垂直方向Binning,Binning这一技术的优点是能将几个像素联合起来作为一个像素使用,提高灵敏度,输出速度,降低分辨率,当行和列同时采用Binning时,图像的纵横比并不改变,当采用2:2Binning,图像的解析度将减少75%。
4、用QE更高的sensor;光电二极管负责将光信号转化为电子信号。此转化率{量子效率(Quantum Efficiency)}并不是100%,越高的量子效率,意味着图像传感器的灵敏度越高。
5、使用像元尺寸更大的sensor; 像元尺寸指每个像元的实际物理尺寸,通常包括14um,10um,9um , 7um ,6.45um ,3.75um 等。像元尺寸从某种程度上反映了芯片的对光的响应能力,像元尺寸越大,能够接收到的光子数量越多,在同样的光照条件和曝光时间内产生的电荷数量越多。对于弱光成像而言,像元尺寸是芯片灵敏度的一种表征.。
以下来自:(4条消息) 图像质量评估(3) -- 噪声_光子散粒噪声_亦枫Leonlew的博客-CSDN博客
随机噪声:
Temporal noise / random noise.时间噪声几乎总是完全随机的。它产生于每个单独像素的值的产生过程,这个值通过转换其入射光子到电子并进行测量转换来获取。表现:对同一场景多次拍摄的图像中的相同位置的像素,我们会看到这个像素在不同图像中会不断变动。
空间噪声(模式噪声 pattern noise,非均匀噪声non-uniformity noise)
单独像素内的变化会带来空间噪声,这种噪声不是随机的。sensor上相邻的像素点即便是在目标物体完全相同的情况下,所得到的数值也会略有不同。这里需要注意一点,像素间的差异也会由时间噪声导致。不同形式的空间噪声只有在将时间噪声降低到最小程度后才可以被观察。这个过程通常通过上百副图像来做平均,以此将时间噪声最小化。

噪声来源:
光子噪声:光子散粒噪声(光子噪声)是光本身的噪声。
将光线想象成光子的流动的话,我们会看到这种流在时间上并非是完美的稳定状态。为便于理解,想象有个容器,它在一个微小的表面上收集雨水。如果是暴雨,那么我们能很精确地提供一个表示单位时间间隔内的这个表面所收集的雨水的平均水量。但是在细雨的情况下,单位时间间隔内可能只会收集到几滴雨水,每次去查看水量,得到的结果变动都会比较大。用这个类比的例子来理解光子散粒噪声是类似的。简单来说就是光子越多,信噪比越好,反之亦然。

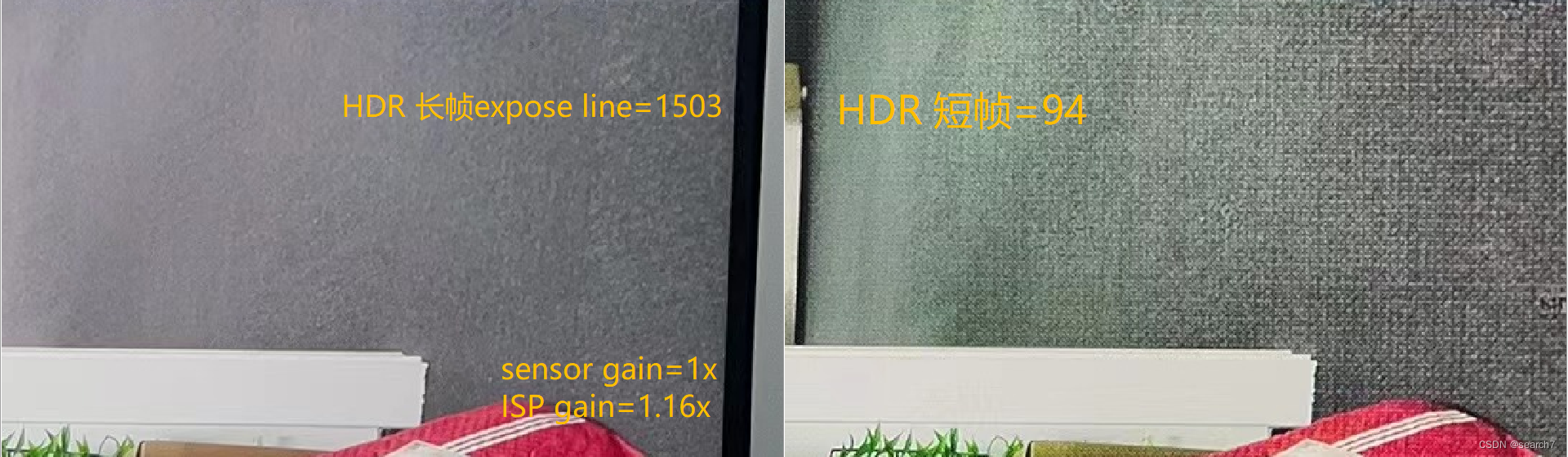
实例:dol2-HDR, gain 配置相同时,长帧效果正常,短帧出现格子纹。
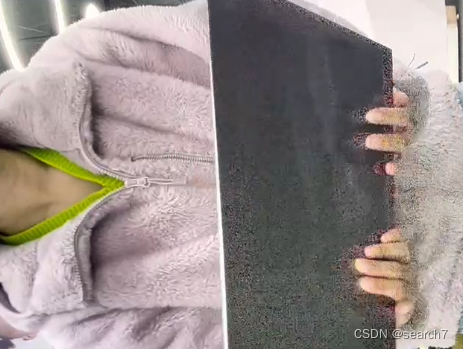
融合后的HDR,物体运动时,产生明显的有轮廓的噪声。
读出噪声是对sensor的读取过程中多种类型的噪声源的概括,其主要来源是电路的固有因素,比如电子热运动等,这些因素造成了ADC转换时的误差。
在sensor层次改善噪声:
为了在sensor这个层次改善噪声,需要降低读出噪声并且增加每次曝光中每个像素的光子数量。更大的像素会收集更多光子,更长的曝光时间会捕获更多光子。最大曝光时间要根据具体应用场景而定,因为曝光时间变长也会引入运动模糊等问题。因此用于改善噪声的选择比较受限,但在许多场景中,信号处理会降低信号噪声,这个过程会使用图像增强和降噪算法。



















 4492
4492

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











