






SeesonDepth Prediction Chanage
Dumpling - Lingzhi
洛杉矶大学
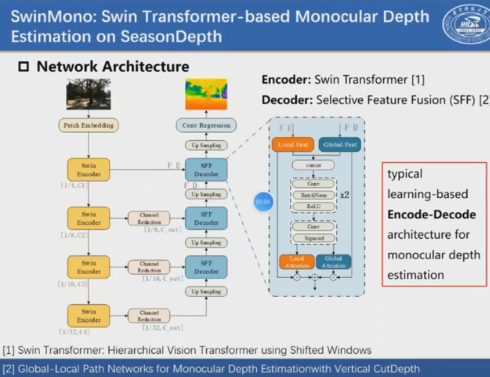
SwinMono : Swin Transformer based Monoclar Depth on SeasonDepth
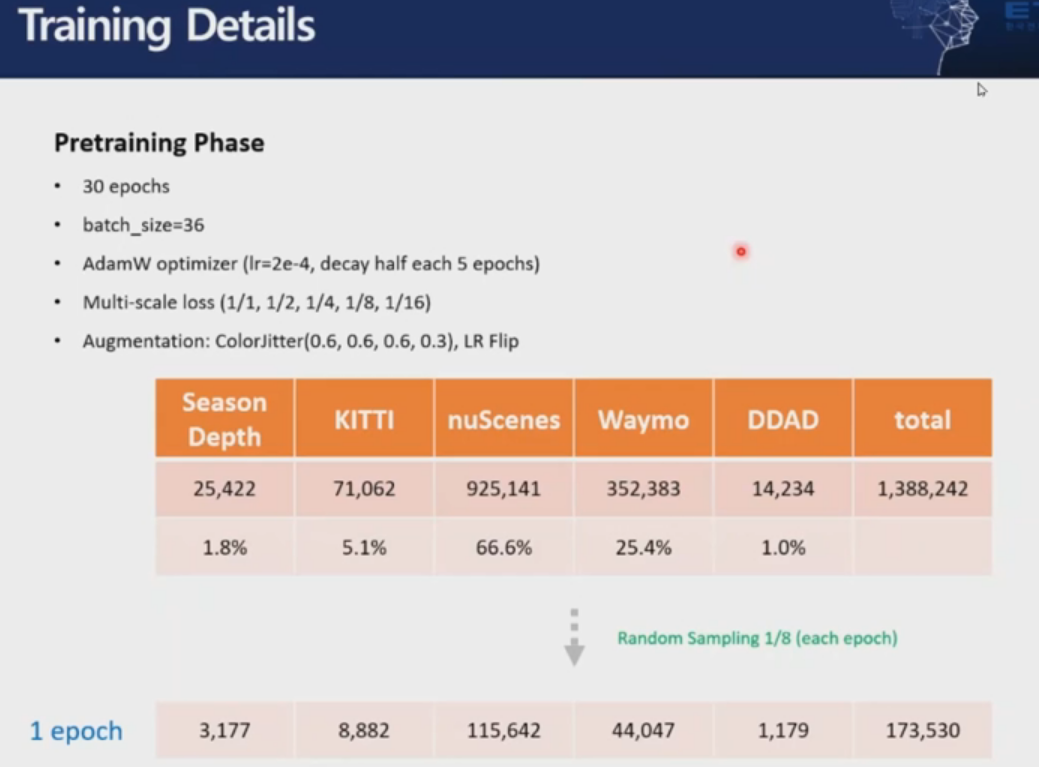
Training Monodepth2 with Many Datasets
South Korea
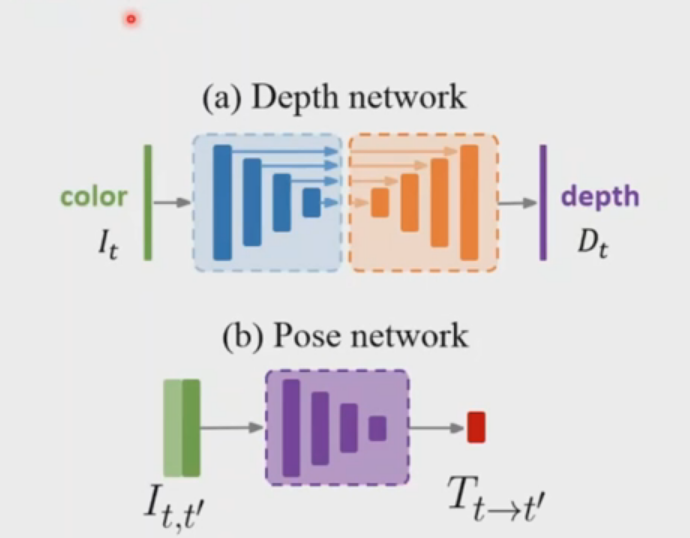
Monodepth2
ICCV2019 Digging into self Supervised Monocular Depth
my
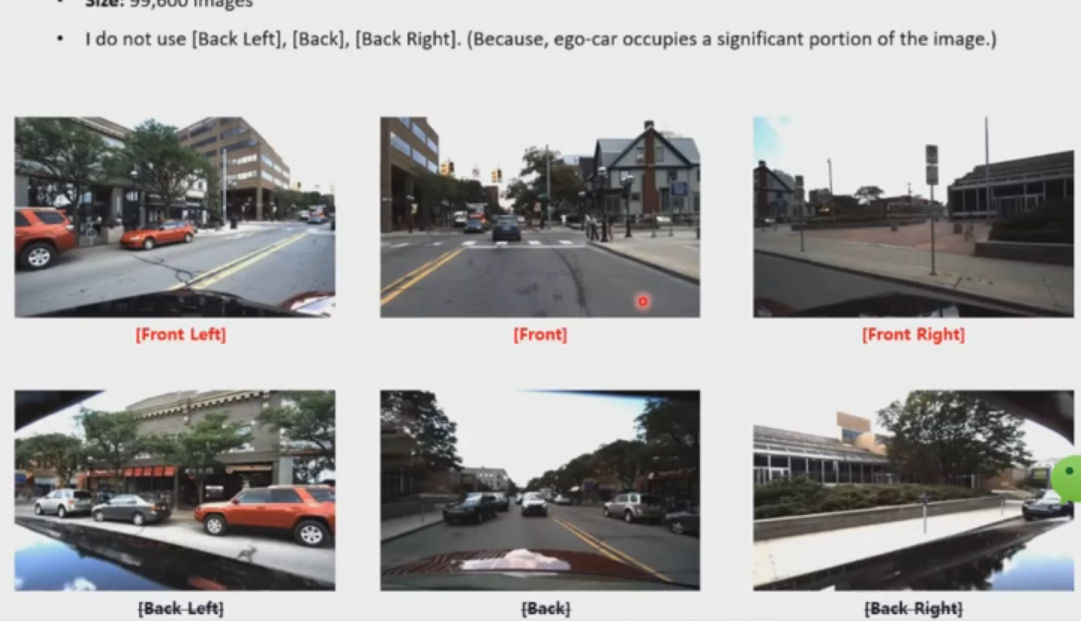
My Contribution : use my datasets
ResNet18 encoder
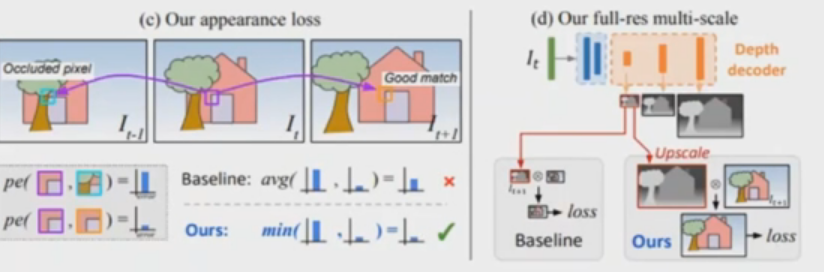
Per-Pixel Minimum Reprojection Loss
Auto musking
Datasets
Size 11586 images 17225 images(validation Set)
KITTI Depth Evaluation Set
No special reason ,I forget use validate data
DDAD
日天之主 : monodepth2还是强啊,什么都没改
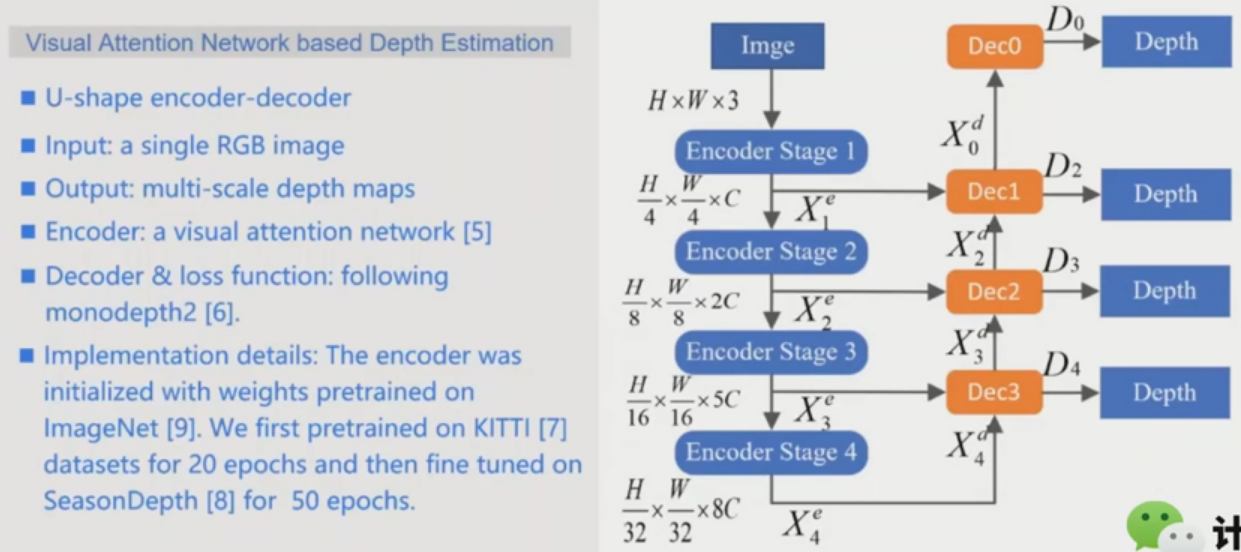
Visual Attention Network based Monocular Depth Estimation
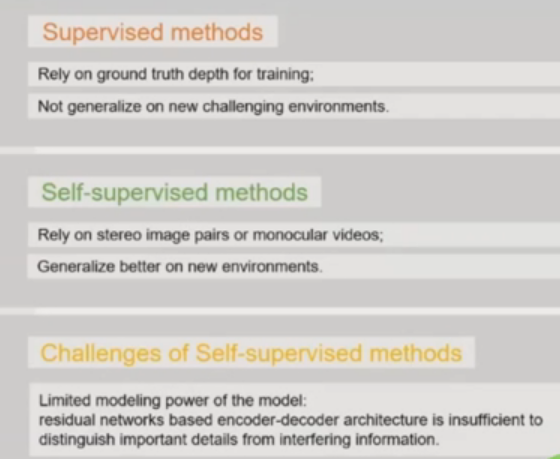
A self(un)-supervised learning 3D scene

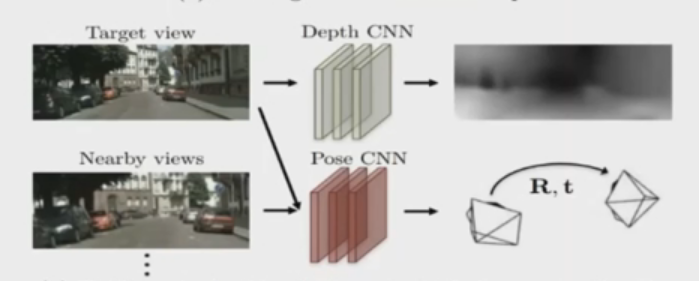
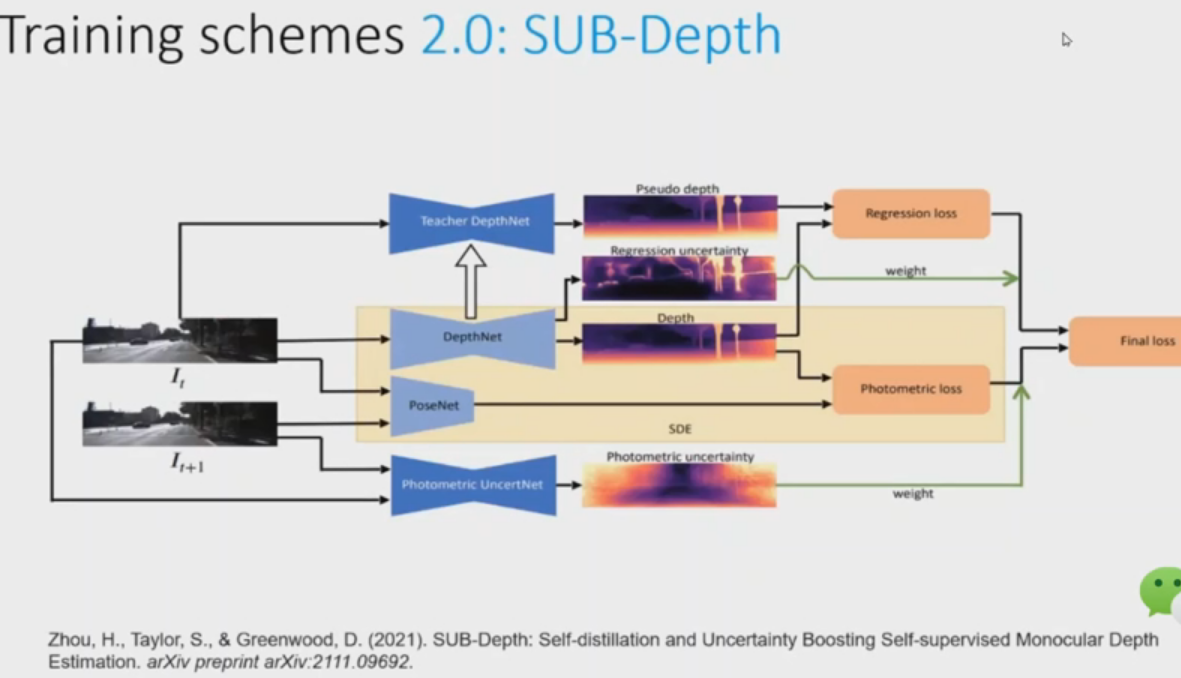
Training schemes
depth cnn
pose cnn
2017
2019
2021

Back bones
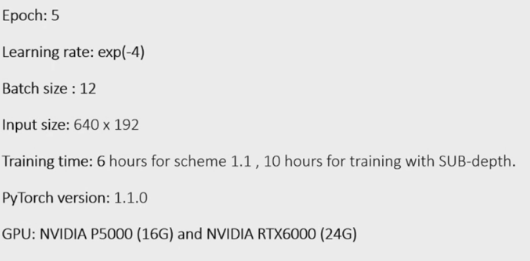
Training detail
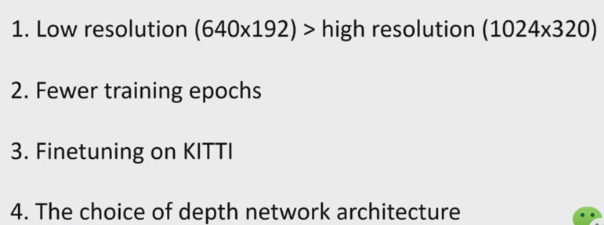
Some findings
SS-learning car
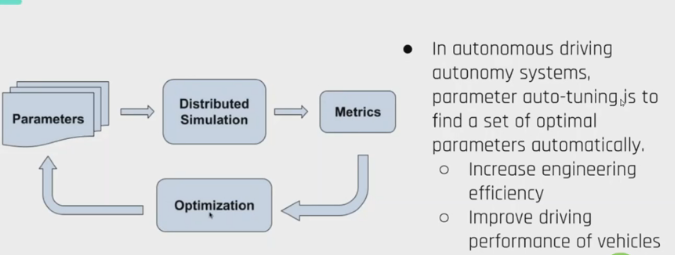
Automatic Parameters Tuning for Autoomous Drving Systems
YanChang,Planningh and Control Teeam


ZOOX
personal transportation , Purpose-Built
sensors/silding doors / on-board computer
Sound Light
much safety
perception / prediction / planning & controls

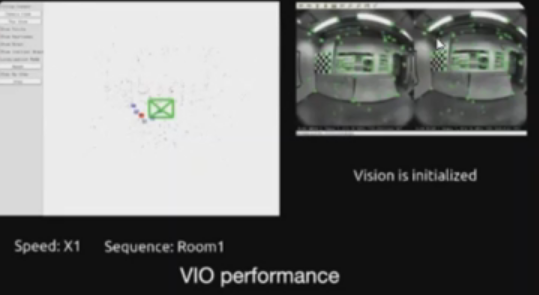
MetaSLAM: Towards General Localization
Peng Yin
current

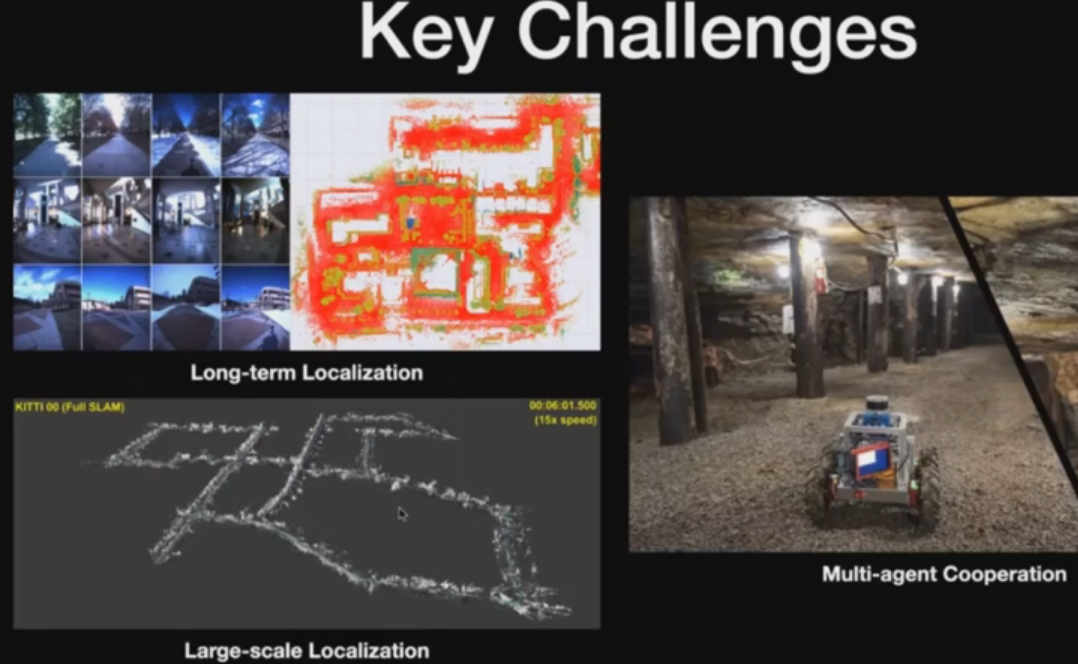
key challenges
Research work:
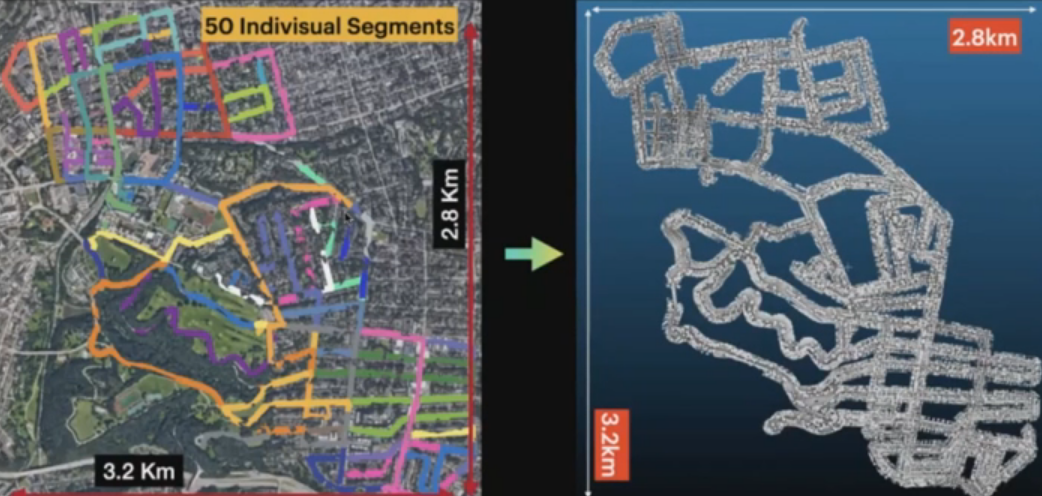
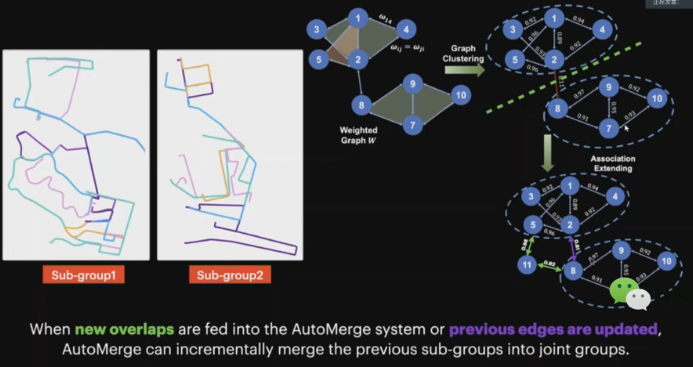
automerge
iLoc
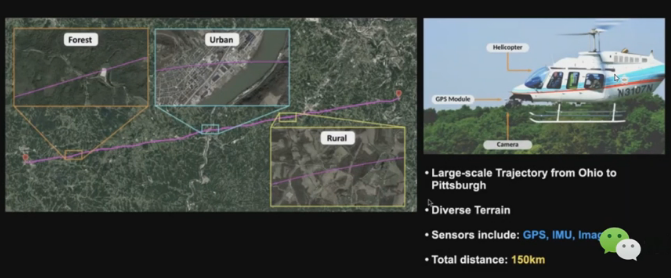
iSimLoc : sim - to - real Uav - turn google earth into open
GPR competition
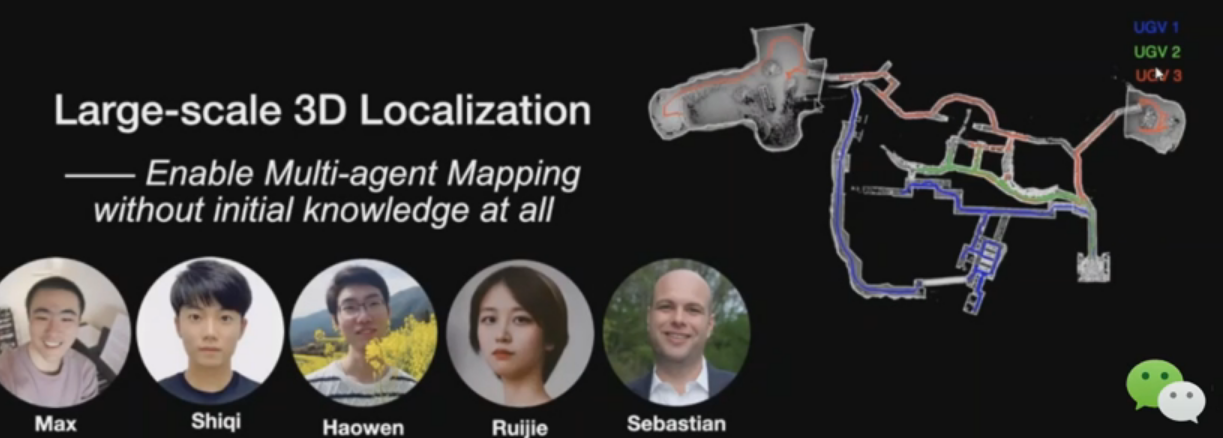
Multi-agnet objects
how to do without GPS
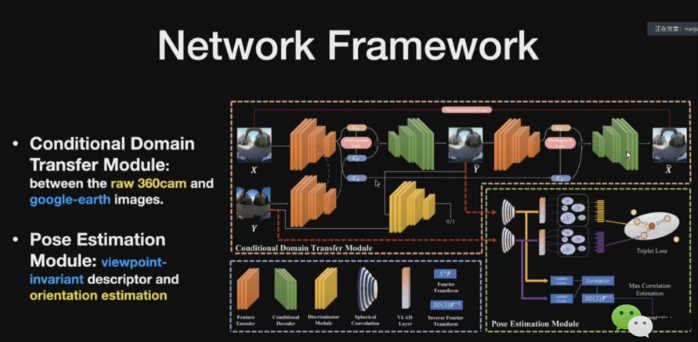
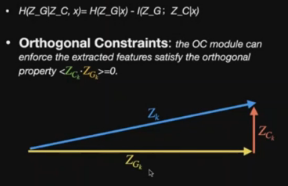
spherical feature -> attention enhanced <- map feature
merge
success in 120 km
sim
sattle
conditional domain /pose estimation
iLoc : viewpoint and conditon invariant additive feature extractor for visual localization
Assistance in Human Navigation

odometry camera
GPR Competition : Towards General Place Recognition
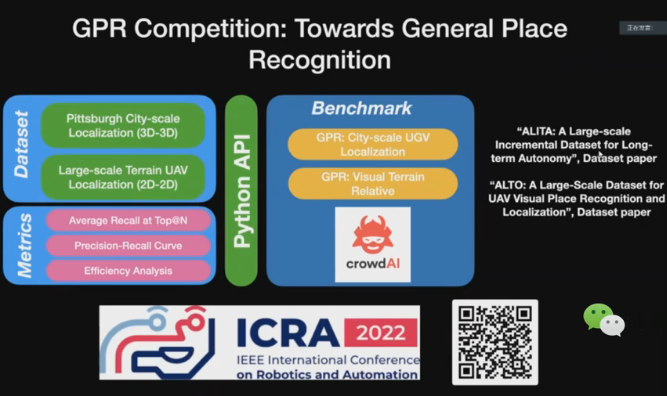

ALITA : A large-scale Incremental Dataset for Long-term Autonomy

250434km
dynmica object / noisy ? same nothing.
How to make Trustworthy and Robust Autonoomus Vehicles ar 270 km/h ?
Johannes Betz
![]()
Why racing ?
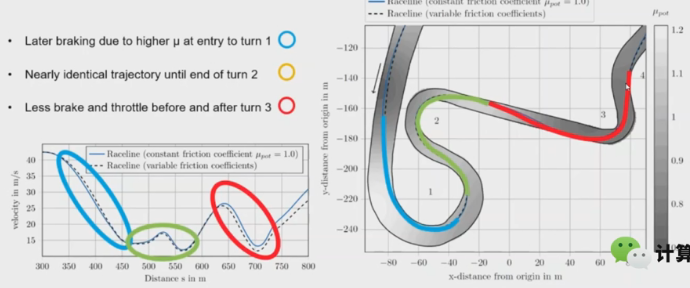
detecting the vehicle limits
decision making at the vehicle limits
handling at the vehicle limits

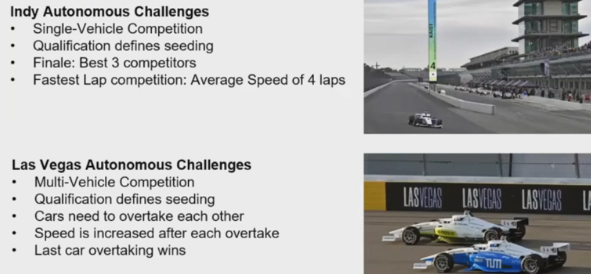
The Indy Autonomous Challenges
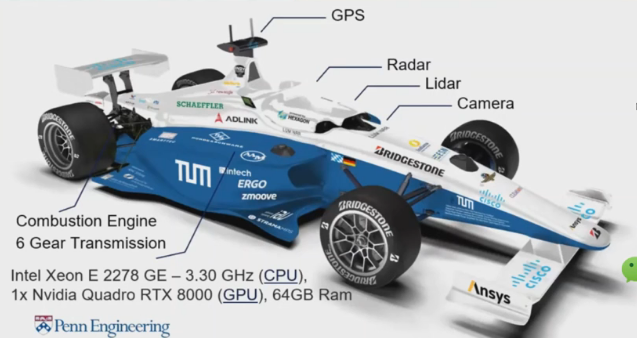
Radar / Lidar / Camera / CPU / GPU / Combustion Engine
Autonomous Racing:
Autonomous Racing not about control.
How we do that ?

Model the Vehicle Dynamics
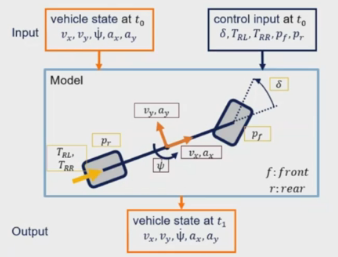
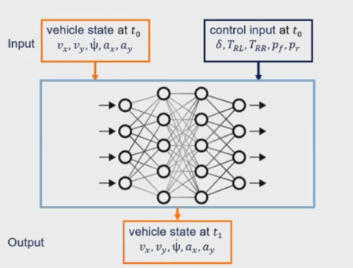
Why? Less paramter , transfer to unknown environments
Detect The Vehicles Limits
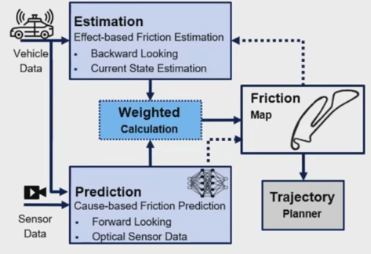
Why? Predict and estimate friciton coefficient

Speed mater
Plan a Local Feasible Trajectory
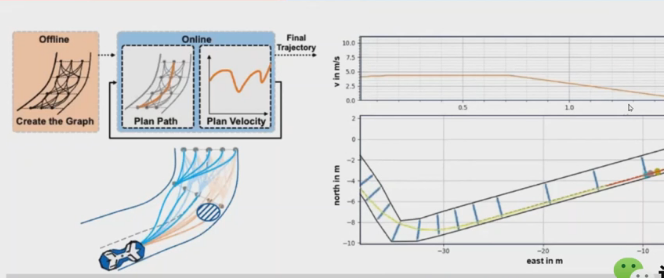
Why? Derive a feasible and dynamic trajectory
Incertiaintu tube gennerated by MPC
MPC based on double track model
Adjust the Controller

Why? Reduce control errors while driving
How to verify robustness and trustworthyness at 270 km/h
Developmet Process Overview
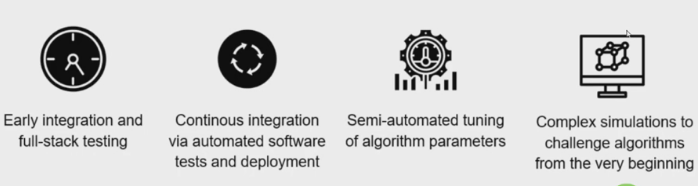
Parameter Tuning
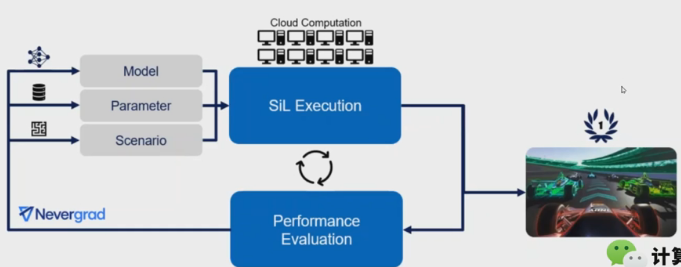
eexection
Adversarial Testing

simulation / real vehicle
Why? verify and cellect
Fail show in some video


people intresting and ask some qustion in 20mins
Data-Effcients
Publications and research fields
Labeled and unlabeled data with multiple modalities
2D image / 3D point / cloud trajectory / HD map
How to exploit labeled & unlabled data .etc?
The problem Semi-Supervised Learning(SSL) on paried 2D & 3D
2D & 3D modalities are good at different things
A baseline on 2D & 3D DetMatch framework
Results & Visualizaitons
SOTA accuracy
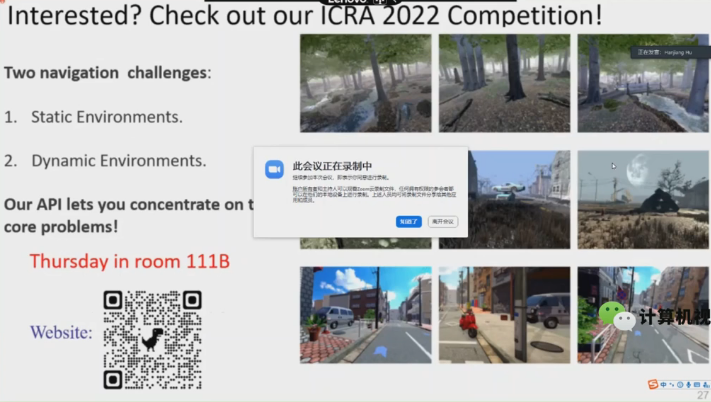
Sim2Real for Vision-Based High-Speed Flight
Antonio Loquercio

Human pilots take years ,good or better than human pilots
Why Agile Flight ?
Making drones faster increases their range(limited by battery life)
Applications:
search & rescure
Transfer Learning: Abstraction

What‘s the problem with that?
simulation /Real world : RGB depth
Data

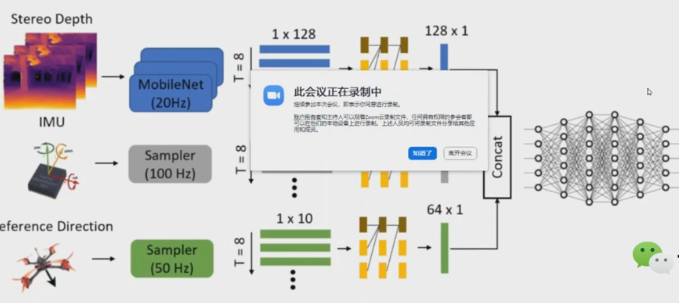
Asychronous Multiple-Hypothesis Action Prediction
Stereo Depth / IMU / Refrecen Direction
Controlled Experiments
Comparison with state-of-the-art navigation methods
What do next ?
Robots does not learn efficiently in the real world
Natural agents do not have something like training and deploy time.
Uncertainty in Deep Learning
A robotic system not check true.
Representation Learning for Dynamic 3D Object Tracking
Fisher Yu (Fisher Yu)
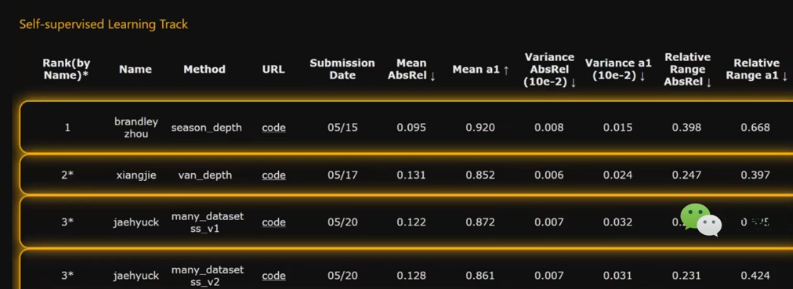
ICRA2022 Season Depth
Dynamic 3D Environment
Learning
3D world /3D motion / heigh-fidelity instance-level reresentation
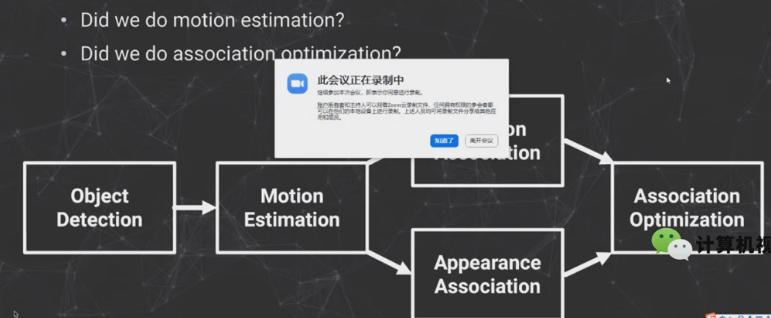
Multiple Object Tracking
Current Tracking Algorithms
直播主题: ICRA国内直播:自动驾驶中的深度估计 & 可信赖自动驾驶汽车与机器人
专题报告
直播时间: 2022年05月23日(周一) 21:30:00—5月24日(周二)04:10
直播嘉宾:
1、苏黎世联邦理工学院计算机系助理教授 Fisher Yu
2、亚马逊自动驾驶部门Zoox高级研究员, 前Lyft自动驾驶技术主管 Yan Chang 3、MIT博士 Heng Yang
4、斯坦福大学智能系统实验博士后研究员 Jiachen Li
5、加州大学伯克利人工智能研究院博后 Antonio Loquercio
6、卡内基梅隆大学机器人研究所项目科学家 Peng Yin
7、宾夕法尼亚大学安全自动系统实验室博士后Johannes Betz
8、麦吉尔大学智能交通实验室博士后Wenshuo Wang
9、加州大学伯克利分校助理教职研究员Wei Zhan
10、伊利诺伊大学厄巴纳-香槟分校博士Linyi Li
直播大纲:
1、变化环境下室外单目深度估计竞赛获奖团队(6个)技术分享
2、可信赖自动驾驶汽车与机器人专题报告
来自 <动态-哔哩哔哩>
分享机器人SLAM、三维重建、增强现实、自动驾驶、深度学习、定位导航等技术 微信公众号:计算机视觉life 进行业(SLAM、三维视觉、传感器、自动驾驶、计算摄影、检测、分割、识别、医学影像、GAN、竞赛)交流群
来自 <计算机视觉life的个人空间_哔哩哔哩_Bilibili>
ICRA直播:自动驾驶中的深度估计机器人 - 计算机视觉life - 哔哩哔哩直播,二次元弹幕直播平台 (bilibili.com)















 1155
1155











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









