






 本文指导如何在Ubuntu18.04系统中更新软件包索引,安装依赖库,下载并解压libLAS源代码,将其放入ROS项目的正确路径,编译和安装libLAS,最后验证安装。
本文指导如何在Ubuntu18.04系统中更新软件包索引,安装依赖库,下载并解压libLAS源代码,将其放入ROS项目的正确路径,编译和安装libLAS,最后验证安装。
1、安装软件包索引:打开终端,运行以下命令确保系统中的软件包信息是最新的:
sudo apt update
2、安装依赖库: 安装编译LASlib所需的一些依赖库,以确保LASlib能够成功编译
sudo apt install build-essential cmake zlib1g-dev
3、下载libLAS源代码:从libLAS的官方网站下载最新的源代码压缩包
在这里出现了一个小问题——使用edge浏览器下载的时候一直显示无法安全下载
解决方法:点开文件旁边的三个点选择保留即可解决
4、解压源代码:我们将下载的源代码压缩包拖进Ubuntu18.04里面,这里我放在了home下
解压缩的命令为:
tar -xvjf libLAS-1.8.1.tar.bz2,其中-xvjf的含义如下:
-x:表示解压缩。-v:表示以详细模式(verbose)执行操作,会显示解压缩的过程。-j:表示使用bzip2格式进行解压缩。在这个命令中,压缩包的扩展名是.tar.bz2,因此需要使用-j选项指定使用bzip2格式。-f:后面紧跟要操作的文件名,表示要对哪个文件进行操作。
综合起来,tar -xvjf libLAS-1.8.1.tar.bz2 这个命令的意思是使用bzip2格式解压缩名为libLAS-1.8.1.tar.bz2的压缩包,并且显示详细的解压缩过程。这里补充一个小知识点-xzvf命令使用于gzip压缩的tar包,-xvjf适用于bzip压缩的tar包,所以这里我们使用-xvjf命令。
改:因为我下载libLAS是想通过lio-sam运行las文件,而我的lio-sam放在catkin-ws/src中,ai推荐安装的位置为catkin_ws/devel中,便于以便在ROS项目中使用
先使用rm命令来移除已经解压缩的文件夹,再重复以上步骤即可(这里需要在catkin_ws/devel文件夹打开终端)
5、进入源代码目录:使用终端进入解压后的LASlib源代码目录
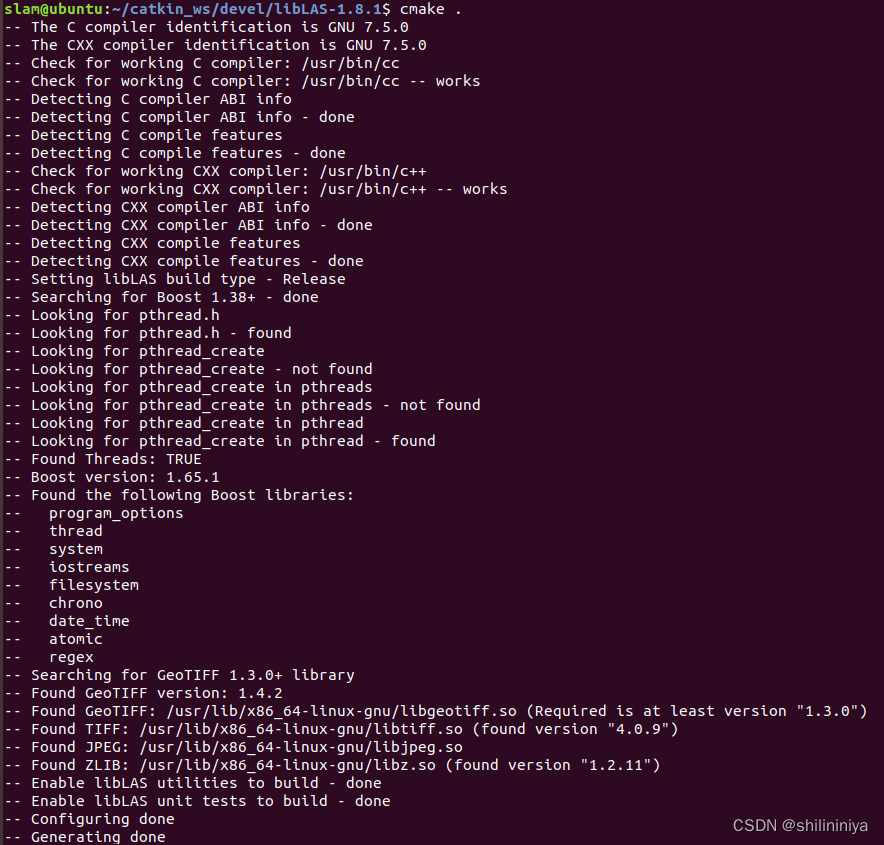
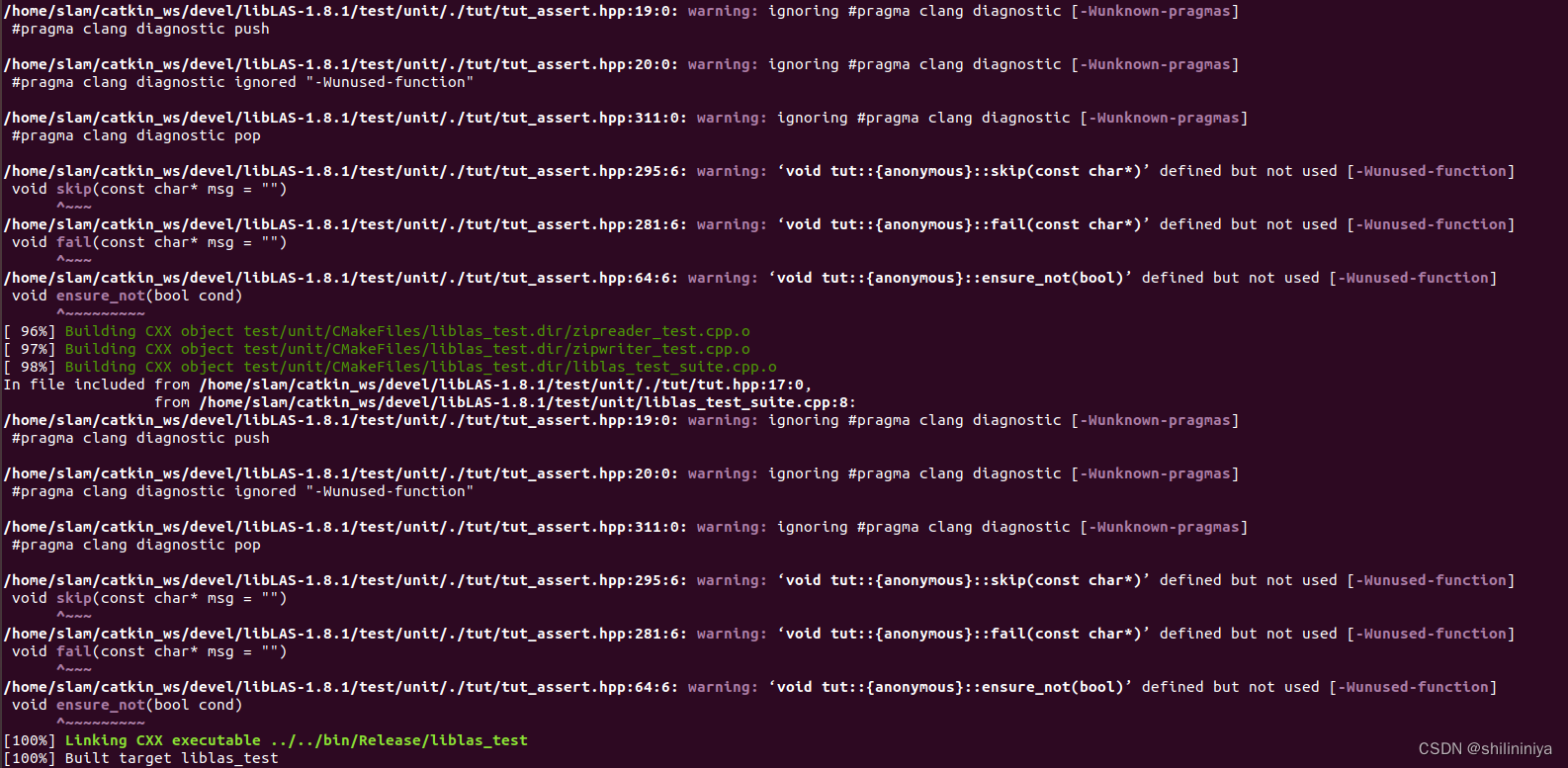
6、编译和安装:在LASlib源代码目录中,执行以下命令进行编译和安装LASlib:
cmake .
make
sudo make install成功的部分截图如下:

7、验证安装:通过查询libLAS的版本号判断是否安装成功
liblas-config --version![]()
安装成功!















 2707
2707











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









