







一、WHU-TLS Tunnel数据集
WHU-TLS Tunnel介绍:全名是地面站扫描点云配准基准数据集,由武大发布、全球最大,总共从 11 个不同环境(即地铁站、高铁站台、山地、森林、公园、校园、住宅、河岸、文物建筑、地下挖掘和隧道)收集了超过 17.4 亿个 3D 点,具有不同的点密度、杂波和遮挡。还为研究人员提供了地面实况变换计算的变换和配准图,旨在更好地比较和深入了解不同配准方法在共同基础上的优缺点。我们希望该基准测试能够满足研究界的需求,并成为开发尖端TLS点云配准方法的重要数据集。此外,拟议的基准还为铁路安全运营、河流调查和监管、森林结构评估、文化遗产保护、滑坡监测和地下资产管理等应用提供了合适的数据集。
下载可通过填写表单的形式获取下载链接,下载后发现WHU-TLS Tunnel数据集的数据类型是las,需要下载安装libLAS库,具体的过程见上一篇博客,链接如下:ubuntu18.04下安装libLAS库_ubuntu 安装 liblas-CSDN博客
安装好以后将数据集放置到ubuntu里面,这里仅选取了Tunnel数据集部分,我的具体存放路径如下:catkin_ws/src/lio-sam/lio-sam datasets。
数据集包括以下部分:
二、安装所需依赖
在Ubuntu 18.04中运行WHU-TLS Tunnel,需要安装以下依赖库和软件包:
1、ROS
Ubuntu18.04对应的ROS版本为Melodic
2、ROS导航和定位相关包
一般slam系统中,需要安装navigation、localization、publisher包
若没有安装,使用以下命令进行安装:
sudo apt-get install -y ros-melodic-navigation
sudo apt-get install -y ros-melodic-robot-localization
sudo apt-get install -y ros-melodic-robot-state-publisher若不确定是否安装,可以使用以下命令来查询是否安装:
rospack find robot_localization
rospack find navigation
rospack find robot_state_publisher若已经安装,则会显示包的路径

其中,navigation包没有安装,接下来进行安装
安装navigation包
navigation包为元功能包,此功能包没有自己的专属功能,是借助其他功能包的功能实现的;其中没有src目录,故无需添加任何依赖项。
1、安装ROS Melodic
sudo apt-get install ros-melodic-desktop-full
已经安装过了,无需重复安装
2、初始化rosdep
sudo rosdep init输入命令出现了以下问题,查询了一下是rosdep无法从提供的URL下载默认的源列表。这可能是由于以下原因:
网络连接问题:您的网络连接可能存在问题,导致无法访问GitHub服务器。
GitHub服务器暂时不可用:有时GitHub服务器可能会因为维护或其他原因暂时不可用。
URL错误:URL可能已更改或不再有效。
 解决方法:修改方法十分简单,更换对应ip进行访问就行。如果是linux系统,使用如下命令打开文件:
解决方法:修改方法十分简单,更换对应ip进行访问就行。如果是linux系统,使用如下命令打开文件:
sudo gedit /etc/hosts 然后将下面这一行内容,复制到hosts文档的最后面,然后保存关闭,问题解决。
然后将下面这一行内容,复制到hosts文档的最后面,然后保存关闭,问题解决。
185.199.108.133 raw.githubusercontent.com重新打开了以后出现下列问题:

因为默认的源列表文件20-default.list已经存在于/etc/ros/rosdep/spurces.list.d/目录中。
解决方法: 如果您想重新初始化rosdep化,您可以选择删除现有的源列表文件,然后再重新运行sudo rosdep init。
sudo rm /etc/ros/rosdep/sources.list.d/20-default.list再重新初始化rosdep
3、更新rosdep数据库
rosdep update如下图所示则更新成功: 4、源化ROS环境:为了确保ROS命令可用,在每个新的终端会话中都需要运行:
4、源化ROS环境:为了确保ROS命令可用,在每个新的终端会话中都需要运行:
source /opt/ros/melodic/setup.bash5、编译工作空间 (catkin工作空间)
cd ~/catkin_ws
catkin_make
source devel/setup.bash6、验证安装
rospack find navigation红色分割线红色分割线红色分割线红色分割线红色分割线红色分割线红色分割线红色分割线
上述安装方法是通过AI提示进行的,发现一直出现问题——具体体现在在工作空间下没有找到navigation包并且使用rospack没有找到,参考了几篇博客进行了以下操作:
安装ros-navigation的依赖库,先用apt install的方式将ros-navigation及其关联包都装上,这样系统在安装过程中会自动装好相应的依赖。然后用apt remove将ros-navigation卸载但保留其依赖,这样就巧妙的将所需依赖都装好了。
sudo apt install ros-melodic-navigation*
sudo apt remove ros-melodic-navigation接下来,下载ros-navigation的源码到工作空间编译安装
cd ~/catkin_ws/src/ 进入工作空间
git clone https://gitee.com/liwuhaoooo/navigation.git
下载ros-navigation源码,显示下载成功

进入navigation,并查看代码版本是否为melodic
cd navigation
git branch
再退出到catkin_ws下进行编译
cd ~/catkin_ws/
catkin_make编译过程中出现下列错误,原因是缺少了名为 "tf2_sensor_msgs" 的包,导致 CMake 找不到相应的配置文件。
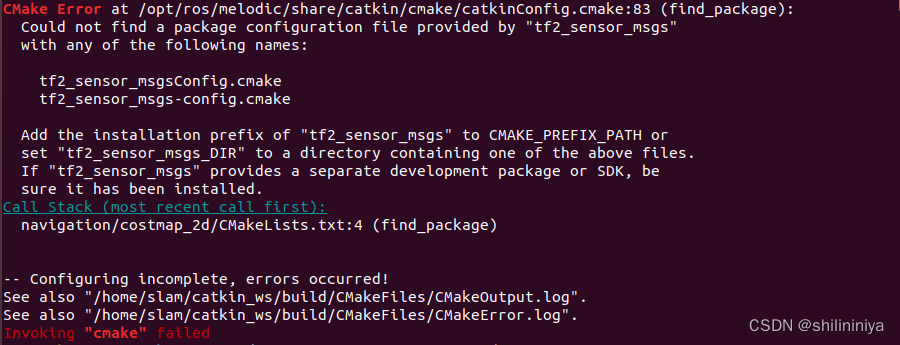 使用sudo命令安装tf2包,重新编译成功。
使用sudo命令安装tf2包,重新编译成功。
sudo apt-get install ros-melodic-tf2-sensor-msgs
















 1030
1030











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









