







《最优状态估计-卡尔曼,H∞及非线性滤波》:第1章 线性系统理论
前言
《最优状态估计-卡尔曼,H∞及非线性滤波》由国外引进的一本关于状态估计的专业书籍,2006年正式出版,作者是Dan Simon教授,来自克利夫兰州立大学,电气与计算机工程系。主要应用于运动估计与控制,学习本文的过程中需要有一定的专业基础知识打底。
本书共分为四个部分,全面介绍了最优状态估计的理论和方法。第1部分为基础知识,回顾了线性系统、概率论和随机过程相关知识,介绍了最小二乘法、维纳滤波、状态的统计特性随时间的传播过程。第2部分详细介绍了卡尔曼滤波及其等价形式,介绍了卡尔曼滤波的扩展形式,包括相关噪声和有色噪声条件下的卡尔曼滤波、稳态滤波、衰减记忆滤波和带约束的卡尔曼滤波等(掌握了卡尔曼,基本上可以说这本书掌握了一半)。第3部分详细介绍了H∞滤波,包括时域和频域的H∞滤波,混合卡尔曼/H∞滤波,带约束的H∞ 滤波。第4部分介绍非线性系统滤波方法,包括扩展卡尔曼滤波、无迹卡尔曼滤波及粒子滤波。本书适合作为最优状态估计相关课程的高年级本科生或研究生教材,或从事相关研究工作人员的参考书。
其实自己研究生期间的主研方向并不是运动控制,但自己在本科大三时参加过智能车大赛,当时是采用PID对智能车的运动进行控制,彼时凭借着自学的一知半解,侥幸拿到了奖项。到了研究生期间,实验室正好有研究平衡车的项目,虽然自己不是那个方向,但实验室经常有组内报告,所以对运动控制在实际项目中的应用也算有了基本的了解。参加工作后,有需要对运动估计与控制进行相关研究,所以接触到这本书。
这次重新捡起运动控制,是希望自己可以将这方面的知识进行巩固再学习,结合原书的习题例程进行仿真,简单记录一下这个过程。主要以各章节中习题仿真为主,这是本书的第一章的2个仿真示例(仿真平台:32位MATLAB2015b),话不多说,开始!
1. MATLAB仿真一:示例1.2
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%功能:《最优状态估计-卡尔曼,H∞及非线性滤波》示例仿真
%示例1.2: MotorSim.m
%环境:Win7,Matlab2015b
%Modi: C.S
%时间:2022-05-02
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function MotorSim(ControlChange)
% Two-phase step motor simulation.
% This file can be used to investigate the effects of linearization.
% If ControlChange = 0 then the nonlinear and linearized simulations should
% match exactly (in steady state). As ControlChange increases, the linearized simulation
% diverges more and more from the nonlinear simulation.
if ~exist('ControlChange', 'var')
ControlChange = 0;
end
Ra = 1.9; % Winding resistance
L = 0.003; % Winding inductance
lambda = 0.1; % Motor constant
J = 0.00018; % Moment of inertia
B = 0.001; % Coefficient of viscous friction
dt = 0.0005; % Integration step size
tf = 1; % Simulation length
x = [0; 0; 0; 0]; % Initial state
xlin = x; % Linearized approximation of state
w = 2 * pi; % Control input frequency
dtPlot = 0.005; % How often to plot results
tPlot = -inf;
% Initialize arrays for plotting at the end of the program
xArray = [];
xlinArray = [];
tArray = [];
dx = x - xlin; % Difference between true state and linearized state
tStart = cputime;
% Begin simulation loop
for t = 0 : dt : tf
if t >= tPlot + dtPlot
% Save data for plotting
tPlot = t + dtPlot - eps;
xArray = [xArray x];
xlinArray = [xlinArray xlin];
tArray = [tArray t];
end
% Nonlinear simulation
ua0 = sin(w*t); % nominal winding A control input
ub0 = cos(w*t); % nominal winding B control input
ua = (1 + ControlChange) * sin(w*t); % true winding A control input
ub = (1 + ControlChange) * cos(w*t); % true winding B control input
xdot = [-Ra/L*x(1) + x(3)*lambda/L*sin(x(4)) + ua/L;
-Ra/L*x(2) - x(3)*lambda/L*cos(x(4)) + ub/L;
-3/2*lambda/J*x(1)*sin(x(4)) + 3/2*lambda/J*x(2)*cos(x(4)) - B/J*x(3);
x(3)];
x = x + xdot * dt;
x(4) = mod(x(4), 2*pi);
% Linear simulation
w0 = -6.2832; % nominal rotor speed
theta0 = -6.2835 * t + 2.3679; % nominal rotor position
ia0 = 0.3708 * cos(2*pi*(t-1.36)); % nominal winding a current
ib0 = -0.3708 * sin(2*pi*(t-1.36)); % nominal winding b current
du = [ua - ua0; ub - ub0];
F = [-Ra/L 0 lambda/L*sin(theta0) w0*lambda/L*cos(theta0);
0 -Ra/L -lambda/L*cos(theta0) w0*lambda/L*sin(theta0);
-3/2*lambda/J*sin(theta0) 3/2*lambda/J*cos(theta0) -B/J -3/2*lambda/J*(ia0*cos(theta0)+ib0*sin(theta0));
0 0 1 0];
G = [1/L 0; 0 1/L; 0 0; 0 0];
dxdot = F * dx + G * du;
dx = dx + dxdot * dt;
xlin = [ia0; ib0; w0; theta0] + dx;
xlin(4) = mod(xlin(4), 2*pi);
end
TCPU = cputime - tStart;
disp(['CPU time = ', num2str(TCPU)]);
% Compare linear and nonlinear simulation.
close all;
figure; hold on;
plot(tArray,xArray(1,:),'b-','LineWidth',1.0);
plot(tArray,xlinArray(1,:),'r--','LineWidth',1.0);
set(gca,'FontSize',12); set(gcf,'Color','White'); set(gca,'Box','on');
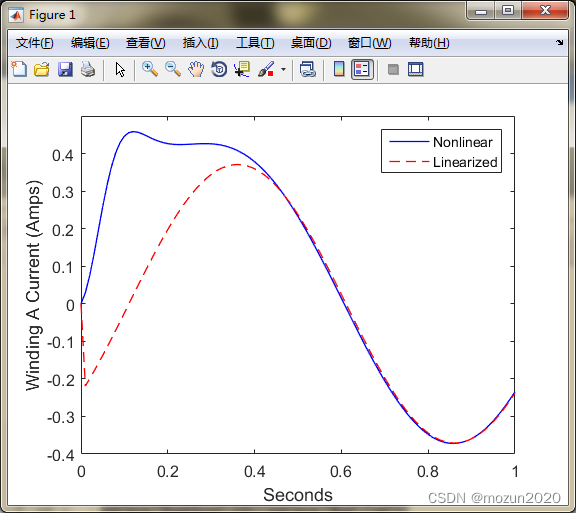
xlabel('Seconds'); ylabel('Winding A Current (Amps)');
legend('Nonlinear', 'Linearized');
figure; hold on;
plot(tArray,xArray(2,:),'b-','LineWidth',1.0);
plot(tArray,xlinArray(2,:),'r--','LineWidth',1.0);
set(gca,'FontSize',12); set(gcf,'Color','White'); set(gca,'Box','on');
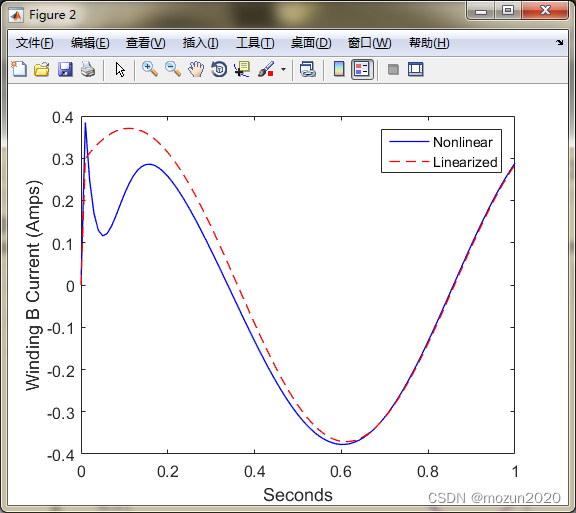
xlabel('Seconds'); ylabel('Winding B Current (Amps)');
legend('Nonlinear', 'Linearized');
figure; hold on;
plot(tArray,xArray(3,:),'b-','LineWidth',1.0);
plot(tArray,xlinArray(3,:),'r--','LineWidth',1.0);
set(gca,'FontSize',12); set(gcf,'Color','White'); set(gca,'Box','on');
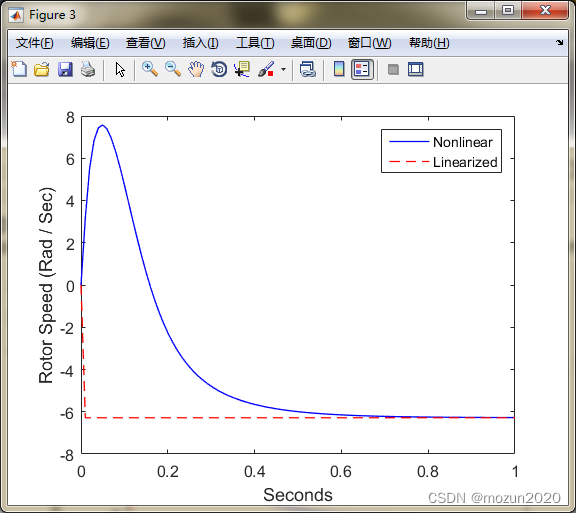
xlabel('Seconds'); ylabel('Rotor Speed (Rad / Sec)');
legend('Nonlinear', 'Linearized');
figure; hold on;
plot(tArray,xArray(4,:),'b-','LineWidth',1.0);
plot(tArray,xlinArray(4,:),'r--','LineWidth',1.0);
set(gca,'FontSize',12); set(gcf,'Color','White'); set(gca,'Box','on');
xlabel('Seconds'); ylabel('Rotor Position (Radians)');
legend('Nonlinear', 'Linearized');
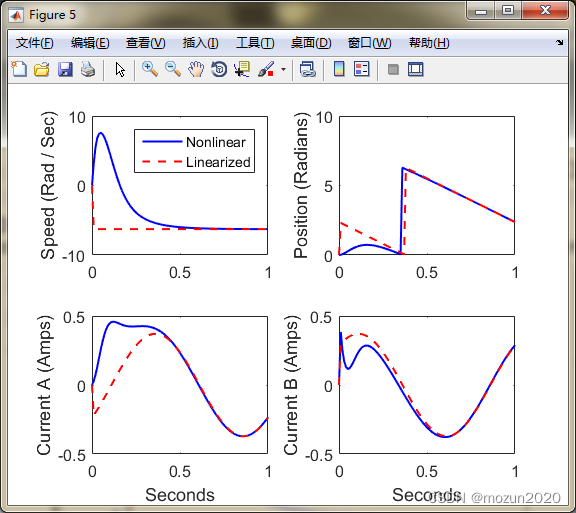
% Put all four plots in a single figure
figure;
set(gcf,'Color','White');
subplot(2,2,1); hold on;
plot(tArray,xArray(3,:),'b-','LineWidth',1.5);
plot(tArray,xlinArray(3,:),'r--','LineWidth',1.5);
set(gca,'FontSize',12); set(gca,'Box','on');
ylabel('Speed (Rad / Sec)');
legend('Nonlinear', 'Linearized');
subplot(2,2,2); hold on;
plot(tArray,xArray(4,:),'b-','LineWidth',1.5);
plot(tArray,xlinArray(4,:),'r--','LineWidth',1.5);
set(gca,'FontSize',12); set(gca,'Box','on');
ylabel('Position (Radians)');
subplot(2,2,3); hold on;
plot(tArray,xArray(1,:),'b-','LineWidth',1.5);
plot(tArray,xlinArray(1,:),'r--','LineWidth',1.5);
set(gca,'FontSize',12); set(gca,'Box','on');
xlabel('Seconds'); ylabel('Current A (Amps)');
subplot(2,2,4); hold on;
plot(tArray,xArray(2,:),'b-','LineWidth',1.5);
plot(tArray,xlinArray(2,:),'r--','LineWidth',1.5);
set(gca,'FontSize',12); set(gca,'Box','on');
xlabel('Seconds'); ylabel('Current B (Amps)');


2. MATLAB仿真二:示例1.3
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%功能:《最优状态估计-卡尔曼,H∞及非线性滤波》示例仿真
%示例1.3: LinearSimEx1.m
%环境:Win7,Matlab2015b
%Modi: C.S
%时间:2022-05-02
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
function LinearSimEx1
% Compare rectangular, trapezoidal, and fourth order Runge Kutta integration.
% Integrate xdot = cos(t).
tf = 1;
TArray = [0.1 0.05 0.025];
for i = 1 : length(TArray)
T = TArray(i);
% Rectangular integration
j = 1;
xRect(j) = 0;
for t = 0 : T : tf - T + T/10
j = j + 1;
xRect(j) = xRect(j-1) + cos(t) * T;
end
% Trapezoidal integration
j = 1;
xTrap(j) = 0;
for t = 0 : T : tf - T + T/10
j = j + 1;
xTrap(j) = xTrap(j-1) + (cos(t) + cos(t+T)) * T / 2;
end
% Fourth order Runge Kutta integration
j = 1;
xRK(j) = 0;
for t = 0 : T : tf - T + T/10
t1 = t + T/2;
d1 = cos(t);
d2 = cos(t1);
d3 = cos(t1);
d4 = cos(t+T);
j = j + 1;
xRK(j) = xRK(j-1) + (d1 + 2 * d2 + 2 * d3 + d4) * T / 6;
end
errRect = 100 * abs(xRect(end) - sin(tf)) / sin(tf);
errTrap = 100 * abs(xTrap(end) - sin(tf)) / sin(tf);
errRK = 100 * abs(xRK(end) - sin(tf)) / sin(tf);
disp(['T = ', num2str(T), ': ', num2str(errRect), ', ', num2str(errTrap), ', ', num2str(errRK)]);
end
仿真结果:
>> LinearSimEx1
T = 0.1: 2.6482, 0.083347, 3.4733e-06
T = 0.05: 1.3449, 0.020834, 2.1703e-07
T = 0.025: 0.67767, 0.0052084, 1.3564e-08
3. 小结
运动控制在现代生活中的实际应用非常广泛,除了智能工厂中各种智能设备的自动运转控制,近几年最火的自动驾驶技术,以及航空航天领域,都缺少不了它的身影,所以熟练掌握状态估计理论,对未来就业也是非常有帮助的。切记矩阵理论与概率论等知识的基础一定要打好。对本章内容感兴趣或者想充分学习了解的,建议去研习书中第一章节的内容,有条件的可以通过习题的联系进一步巩固充实。后期会对其中一些知识点在自己理解的基础上进行讨论补充,欢迎大家一起学习交流。
原书链接:Optimal State Estimation:Kalman, H-infinity, and Nonlinear Approaches
















 666
666











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











