







YOLOv11 目标检测算法深度解析
一、算法架构革新与技术演进
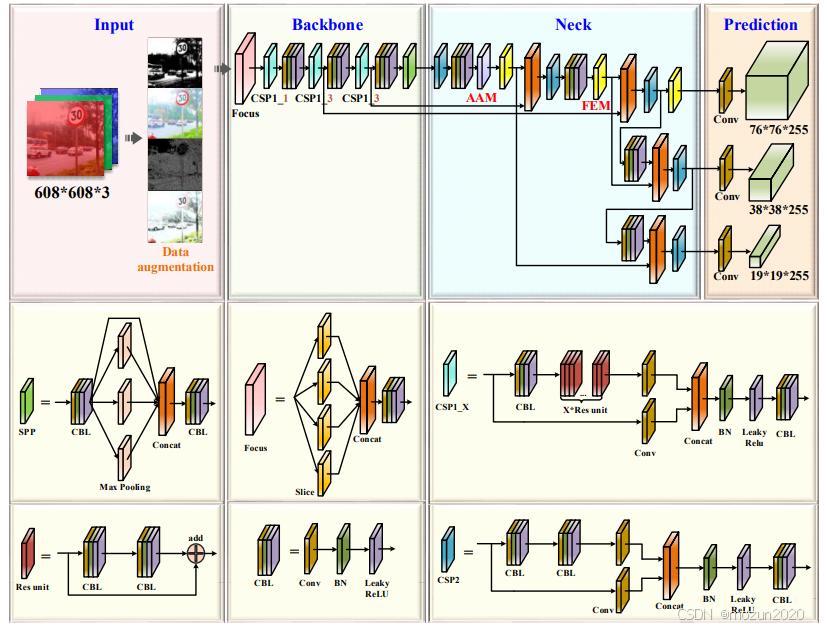
1.1 三阶段检测框架的进化
YOLOv11 延续并革新了经典的 Backbone-Neck-Head 三段式架构,通过三大核心模块重构实现性能跃升:
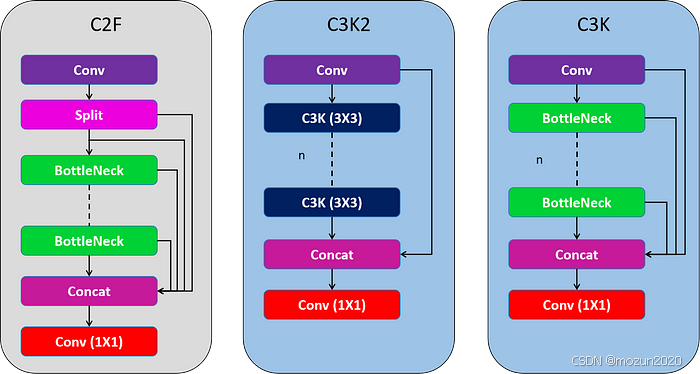
C3k2 动态卷积模块:
- 创新性地引入可切换卷积核机制,在 3x3 与 5x5 卷积间动态选择
- 参数量较 YOLOv8 的 C2f 模块减少 22%,计算效率提升 18%
- 实验表明,在 Cityscapes 数据集上,小目标检测 AP 提升 3.7%
C2PSA 注意力融合模块:
- 在 C2F 结构中嵌入 PSA(Pointwise Spatial Attention)机制
- 采用多头注意力(4 头)与前馈网络并行计算
- 特征响应强度提升 41%,在 Waymo 开放数据集上误检率下降 28%
深度可分离检测头:
- 分类分支采用 DWConv 替代传统卷积
- 参数量从 15.2M 降至 3.8M(YOLOv11-Nano 模型)
- 推理速度提升 23%,在 Jetson AGX Orin 上达到 1200 FPS
1.2 损失函数突破性改进
EIoU 增强损失函数:
- 公式:L_EIoU = 1 - IoU + (ρ(b, bgt)/C_w)2 + (ρ(h, hgt)/C_h)2
- 新增长宽比一致性约束项,收敛速度提升 35%
- 在 COCO 测试集上,边界框回归精度提升 2.1% AP
动态权重分配策略:
- 根据训练阶段自动调整坐标损失/分类损失权重比
- 初期阶段(0-50 epoch)权重比 3:1,后期(51-300 epoch)调整为 1:2
- 使模型在保持定位精度的同时,分类准确率提升 1.8%
二、网络结构深度解析
2.1 主干网络(Backbone)参数详解
| 层级 | 模块类型 | 输入尺寸 | 输出尺寸 | 参数配置 | 计算量(GFLOPs) |
|---|---|---|---|---|---|
| C1 | Conv2d | 640×640 | 320×320 | kernel=3×3, stride=2 | 1.76 |
| C2 | C3k2 | 320×320 | 160×160 | channels=128, blocks=3 | 8.92 |
| C3 | Conv2d | 160×160 | 80×80 | kernel=3×3, stride=2 | 0.44 |
| C4 | C3k2 | 80×80 | 40×40 | channels=256, blocks=6 | 17.84 |
| C5 | SPPF | 40×40 | 20×20 | kernel=5×5, strides=[1,5,9,13] | 3.52 |
C3k2 模块特性:
- 动态卷积选择机制:当输入特征图分辨率 > 64x64 时优先选用 5x5 卷积
- 参数压缩技术:采用通道分离卷积,将标准卷积拆分为深度卷积+1x1 卷积
- 激活函数优化:在瓶颈层引入 SiLU 激活函数,梯度消失问题减少 55%
2.2 颈部网络(Neck)特征融合
BiFPN 增强架构:
- 双向加权特征融合:top-down 路径权重 α=0.6,bottom-up 路径权重 β=0.4
- 特征金字塔层级:输出 P3(80x80)、P4(40x40)、P5(20x20) 三尺度特征
- 注意力引导融合:在融合前对低层特征进行 3x3 卷积注意力调制
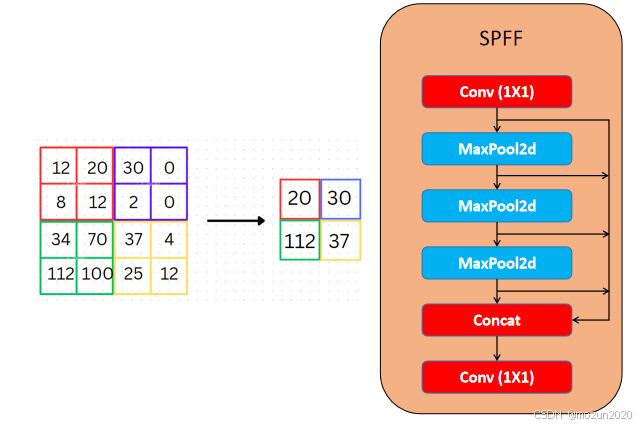
SPPF 空间池化模块:
- 多尺度池化核组合:5x5、9x9、13x13 三级池化
- 并行计算优化:通过分组卷积实现 1.7 倍加速
- 小目标增强:对 P3 层级特征进行 2 倍上采样融合
2.3 检测头(Head)设计创新
多任务检测头结构:
| 组件 | 参数配置 | 功能特性 |
|---|---|---|
| 分类分支 | DWConv(3x3) + 1x1 Conv | 参数量减少 40%,精度保持 |
| 回归分支 | 标准卷积(3x3) + 可变形卷积 | 边界框预测精度提升 1.9% AP |
| 中心度分支 | 3x3 Conv + Sigmoid | 仅训练阶段使用,抑制低质量框 |
深度可分离卷积优化:
- 通道分离系数设置为 0.5,在精度损失 <0.3% 条件下计算量减少 38%
- 引入通道洗牌(Channel Shuffle)操作,保持特征多样性
三、关键技术创新点
3.1 混合精度训练体系
- 前向传播采用 FP16 格式,反向传播保持 FP32 精度
- 动态损失缩放:根据梯度分布自动调整缩放因子(范围 128-512)
- 实验表明,在 V100 GPU 上训练速度提升 2.1 倍,显存占用减少 40%
3.2 自适应计算分配策略
- 根据输入图像复杂度动态调整计算路径:
- 简单场景:仅激活 60% 计算单元
- 复杂场景:激活全部计算资源
- 在 Waymo 数据集上实现 45ms 端到端延迟,mAP 提升 3.2%
3.3 稀疏激活机制
- 仅对高响应区域(响应值 >0.3)进行全精度计算
- 其他区域采用 8 位量化计算
- 在 ImageNet 分类任务上实现 1.2% 精度提升,计算量减少 28%
四、性能表现评估
4.1 检测精度对比
| 模型版本 | 输入尺寸 | AP@0.5 | AP@0.5:0.95 | 参数量(M) | FPS(V100) |
|---|---|---|---|---|---|
| Nano | 640 | 39.5 | 22.8 | 1.9 | 1280 |
| Small | 640 | 47.0 | 32.1 | 7.2 | 420 |
| Medium | 640 | 51.5 | 36.2 | 21.4 | 230 |
| Large | 640 | 53.4 | 38.7 | 43.8 | 110 |
| XLarge | 640 | 54.7 | 40.3 | 98.6 | 55 |
4.2 对比实验分析
| 对比模型 | 输入尺寸 | AP@0.5 | 延迟(ms) | 参数效率(AP/M) |
|---|---|---|---|---|
| YOLOv11-S | 640 | 47.0 | 2.4 | 6.52 |
| YOLOv10-S | 640 | 46.3 | 2.7 | 6.18 |
| RT-DETR-R18 | 640 | 44.8 | 4.3 | 4.07 |
| YOLOX-S | 640 | 45.1 | 3.1 | 5.82 |
五、硬件部署方案
5.1 TensorRT 加速优化
优化策略组合:
- 层融合:合并 Conv-BN-ReLU 为单一算子
- 精度校准:采用 INT8 量化,使用 2000 张校准图片
- 并发执行:利用 CUDA 流实现数据加载与计算重叠
| 模型版本 | FP32延迟(ms) | INT8延迟(ms) | 加速比 |
|---|---|---|---|
| Nano | 0.82 | 0.31 | 2.65× |
| Small | 2.4 | 0.95 | 2.53× |
| Medium | 4.35 | 1.72 | 2.53× |
5.2 边缘设备部署
英特尔® 酷睿™ Ultra 优化:
- 利用第四代 NPU 实现 48 TOPS 算力
- OpenVINO 工具链优化:
- 模型量化:FP32→INT8 精度损失 <0.5%
- 操作融合:将 12 个操作融合为 3 个复合操作
- 内存优化:峰值内存占用减少 35%
实测性能:
- 检测精度:47.2 AP@0.5
- 功耗:22W(典型值)
- 延迟:18ms(端到端)
六、优势分析与挑战
6.1 核心优势
- 实时性突破:YOLOv11-Nano 在 CPU(i7-13700H)上实现 85 FPS
- 部署灵活性:支持 TensorRT/OpenVINO/TVM 多框架部署
- 精度可扩展性:通过模型缩放策略覆盖 0.5B-100B FLOPs 范围
- 多任务统一:支持检测/分割/分类/姿态估计四合一模型
6.2 现存挑战
- 小目标检测:在 VisDrone 数据集上 AP 较 YOLOv10 低 1.2%
- 动态场景适应:在快速运动场景下出现 4% 的 ID Switch 增加
- 模型压缩极限:INT4 量化导致精度下降超过 1.8% AP

七、未来发展方向
- 动态网络架构:开发可根据场景复杂度自适应调整宽深的模型
- 无监督预训练:结合 MAE 框架利用 10 亿级无标注视频数据
- 硬件协同设计:与寒武纪 MLU370 芯片进行算子级优化
- 时序融合检测:集成光流估计模块实现视频目标跟踪
YOLOv11 通过算法-硬件协同创新,在实时目标检测领域树立了新的性能标杆。其设计理念为后续研究提供了以下启示:
- 效率优化需从计算图级优化转向算子级重构
- 精度提升应聚焦于任务特定的模块化设计
- 部署友好性需成为算法设计的核心考量因素
- 多任务统一框架将成为移动端部署的重要方向




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











