









MCU为STM32L431,通用定时器框图:
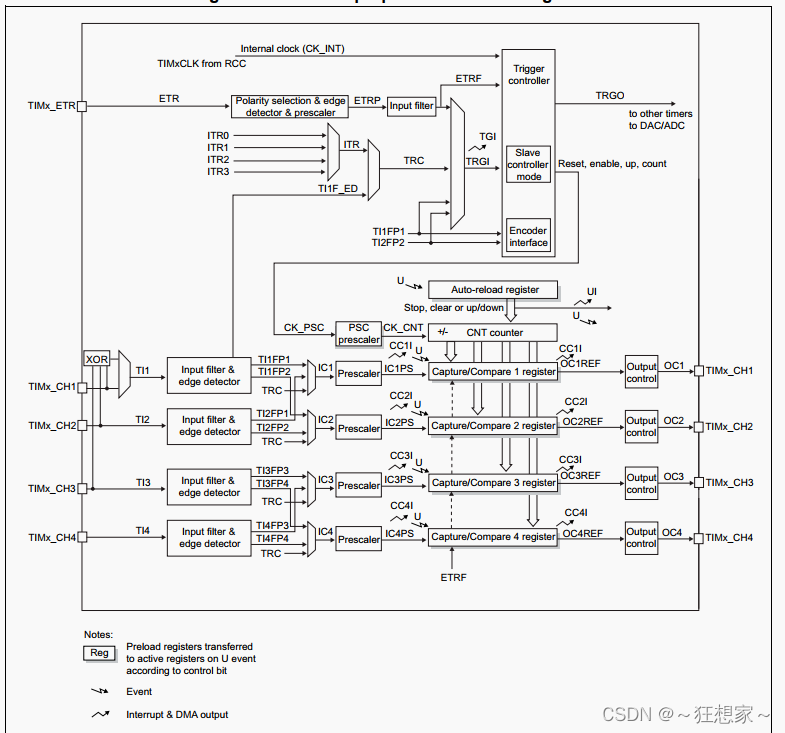
编码器接口模式一共有三种,通过TIMx_SMCR寄存器的SMS[3:0]位来选择。模式1计数器仅在TI1FP1的边沿根据TI2FP2的电平来判断向上/下计数;模式2计数器仅在TI2FP2的边沿根据TI1FP1的电平来判断向上/下计数;模式3计数器同时在TI1FP1和TI2FP2的边沿根据另外一条线的电平来判断向上/下计数。
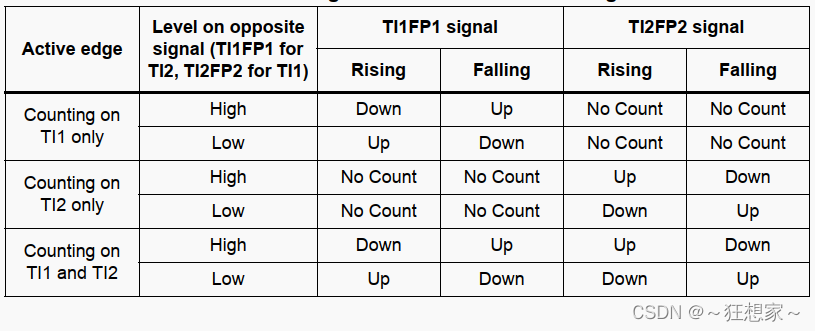
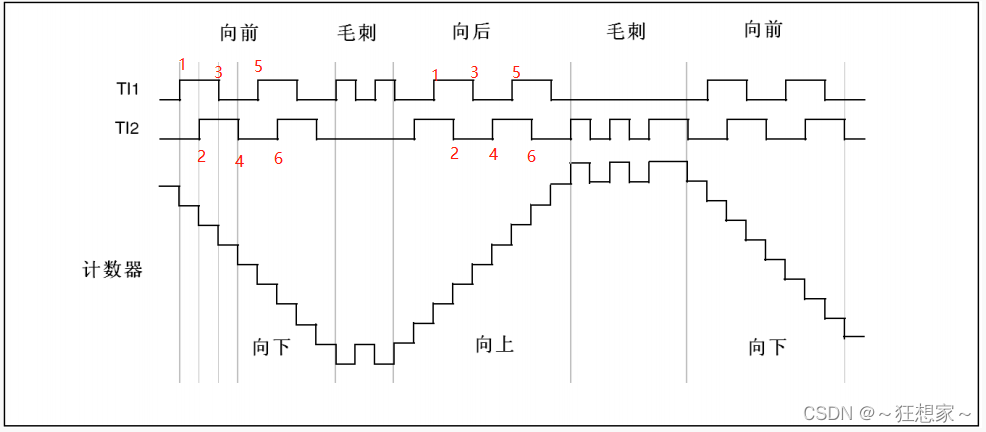
计数方向与编码器信号的关系:
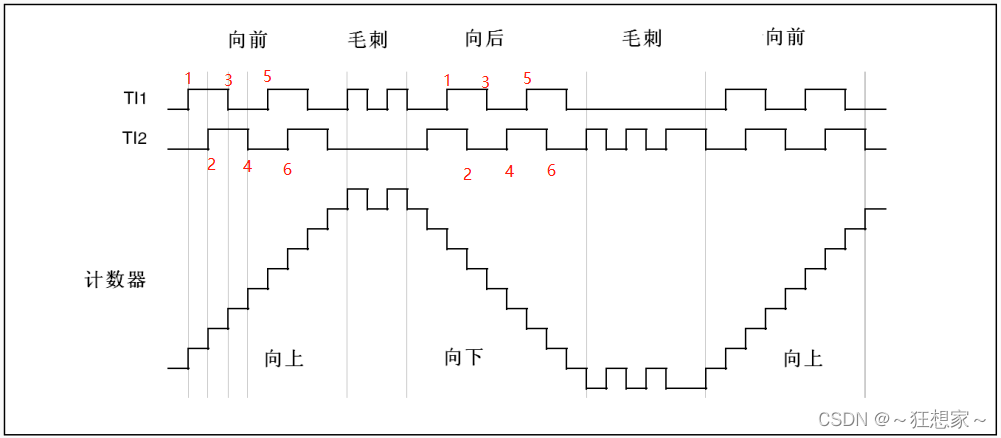
使用编码器模式3,假如使用如下配置时,
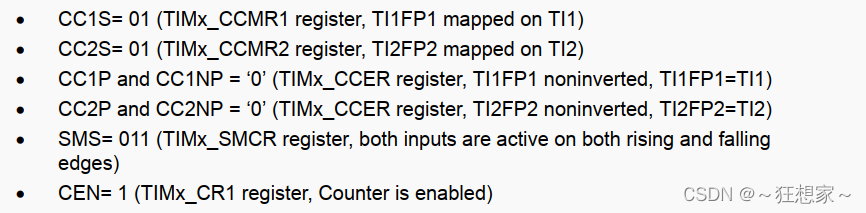
IC1FP1和IC2FP2不反相,IC1FP1=TI1,IC2FP2=TI2;TI1FP1相对信号是TI2,TI2FP2相对信号是TI1,对应关系如下:
| 向前 | 点位 | TI1FP1信号 | TI2FP2信号 | 相对信号及电平 | 计数器方向 |
|---|---|---|---|---|---|
| 1 | 上升 | TI2(低) | 向上 | ||
| 2 | 上升 | TI1(高) | 向上 | ||
| 3 | 下降 | TI2(高) | 向上 | ||
| 4 | 下降 | TI1(低) | 向上 | ||
| 5 | 上升 | TI2(低) | 向上 | ||
| 6 | 上升 | TI1(高) | 向上 | ||
| 向后 | 点位 | TI1FP1信号 | TI2FP2信号 | 相对信号及电平 | 计数器方向 |
| 1 | 上升 | TI2(高) | 向下 | ||
| 2 | 下降 | TI1(高) | 向下 | ||
| 3 | 下降 | TI2(低) | 向下 | ||
| 4 | 上升 | TI1(低) | 向下 | ||
| 5 | 上升 | TI2(高) | 向下 | ||
| 6 | 下降 | TI1(高) | 向下 |
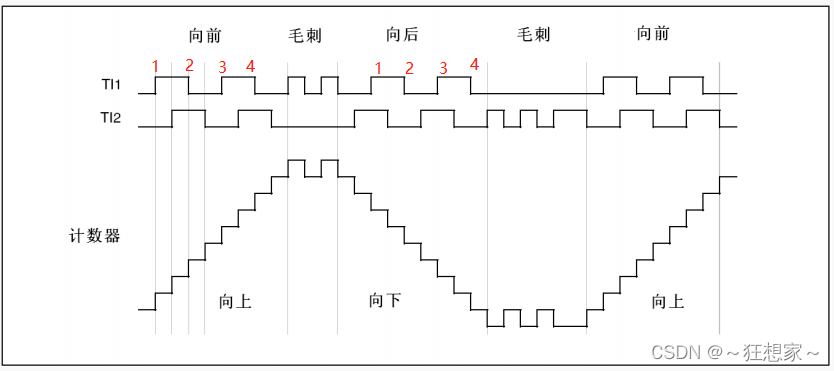
同样使用编码器模式3,当IC1FP1极性反相时计数器的操作实例(CC1P=’1’,其他配置与上例相同),TI1极性相反,IC2FP2=TI2;TI1FP1相对信号是TI2,TI2FP2相对信号是TI1,对应关系如下:
| 向前 | 点位 | TI1原信号 | TI1FP1信号 | TI2FP2信号 | 相对信号及电平 | 计数器方向 |
|---|---|---|---|---|---|---|
| 1 | 上升 | 下降 | TI2(低) | 向下 | ||
| 2 | 上升 | TI1(低) | 向下 | |||
| 3 | 下降 | 上升 | TI2(高) | 向下 | ||
| 4 | 下降 | TI1(高) | 向下 | |||
| 5 | 上升 | 下降 | TI2(低) | 向下 | ||
| 6 | 上升 | TI1(低) | 向下 | |||
| 向前 | 点位 | TI1原信号 | TI1FP1信号 | TI2FP2信号 | 相对信号及电平 | 计数器方向 |
| 1 | 上升 | 下降 | TI2(高) | 向上 | ||
| 2 | 下降 | TI1(低) | 向上 | |||
| 3 | 下降 | 上升 | TI2(低) | 向上 | ||
| 4 | 上升 | TI1(高) | 向上 | |||
| 5 | 上升 | 下降 | TI2(高) | 向上 | ||
| 6 | 下降 | TI1(低) | 向上 |
如果使用编码器模式1,IC1FP1和IC2FP2不反相,IC1FP1=TI1,IC2FP2=TI2;TI1FP1相对信号是TI2,TI2FP2相对信号是TI1,计数器在TI1FP1的边沿根据IC2FP2的电平来计数。
| 向前 | 点位 | TI1FP1信号 | 相对信号及电平 | 计数器方向 |
|---|---|---|---|---|
| 1 | 上升 | TI2(低) | 向上 | |
| 2 | 下降 | TI2(高) | 向上 | |
| 3 | 上升 | TI2(低) | 向上 | |
| 4 | 下降 | TI2(高) | 向上 | |
| 向后 | 点位 | TI1FP1信号 | 相对信号及电平 | 计数器方向 |
| 1 | 上升 | TI2(高) | 向下 | |
| 2 | 下降 | TI2(低) | 向下 | |
| 3 | 上升 | TI2(高) | 向下 | |
| 4 | 下降 | TI2(低) | 向下 |
定时器编码器模式配置:
void Encoder_TIM2_Init(void)
{
TIM_Encoder_InitTypeDef sConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 0;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = (ENCODER_RELOAD_NUM - 1);
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
sConfig.EncoderMode = TIM_ENCODERMODE_TI1;
sConfig.IC1Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC1Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC1Prescaler = TIM_ICPSC_DIV1;
sConfig.IC1Filter = 0;
sConfig.IC2Polarity = TIM_ICPOLARITY_RISING;
sConfig.IC2Selection = TIM_ICSELECTION_DIRECTTI;
sConfig.IC2Prescaler = TIM_ICPSC_DIV1;
sConfig.IC2Filter = 0;
if (HAL_TIM_Encoder_Init(&htim2, &sConfig) != HAL_OK)
{
PRINT_ERR("Encoder Tim Init Err\r\n");
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
PRINT_ERR("Encoder Init Mode Err\r\n");
}
HAL_TIM_Encoder_Start(&htim2,TIM_CHANNEL_ALL);
}
其中htim2.Init.Period的值为重装载值,计数器的计数值在0(包含)至Period(包含)之间向上或向下计数,可以通过计数值的变化根据编码器接口的模式来判断编码器的方向,也可以TIMx_CR1寄存器的DIR位来判断方向。如果不需要判断编码器转过的圈数,那么重装载值可以顺便设置,比如65535;如果需要判断转过的圈数,假定使用模式3,编码器旋转一周产生的脉冲数是X,那么重装载值可以设置为(X-1)*4,因为模式3在TI1和TI2的边沿都计数,此时可以通过定时器的溢出中断来判断是不是旋转一周。
如果只需要判断旋转方向,并且编码器旋转一周的产生的脉冲数很小的话,那就使用模式1或者模式2比较好,如果使用模式3的话仅通过TIMx_CNT寄存器的值来计算转过角度的话误差比较大。
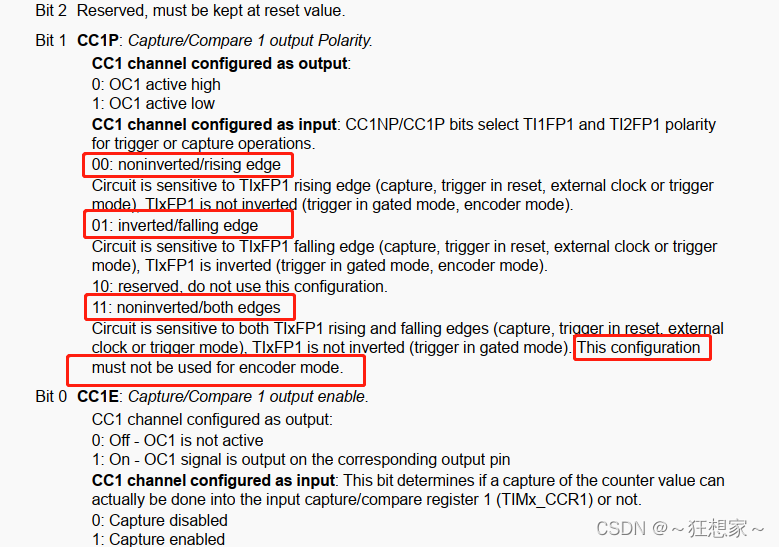
另外配置的时候编码器模式IC1Polarity和IC2Polarity的极性只能选择上升沿或者下降沿,不能设置为所有边沿,这样的话会导致计数器计数失败,并且方向判断也会有问题。















 1877
1877











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









