






机器人的关节越多越灵活
机器人是一个多输入多输出的系统。
机器人包括sensor,作为置位器的电脑或是process,马达等的自动器。
空间中的点需要有六个自由度去处理,三个在位置,三个在方向。
只有在自由度和关节数match的时候,求解才是有限的。一般是以6为自由度作考量。
compliance 需要柔软度。
力和速度合在一起的顺应性控制。
differential relationship 规划路径 到空间的点 需要引入动力学,通常动画很假是因为缺少很多物理性质。相对的,如果动力学模拟的很好的话,模拟系统就会很真实,很符合真实情况。
calibration 校正工作
一般情况下F=ma,力和加速度有关。但是在旋转中,力和速度也有关系。F=mv或是F=mp
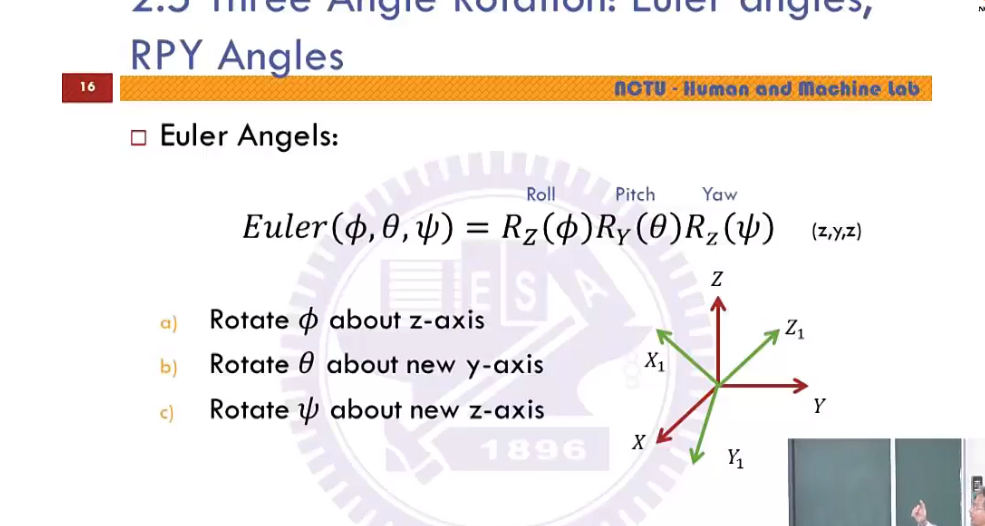
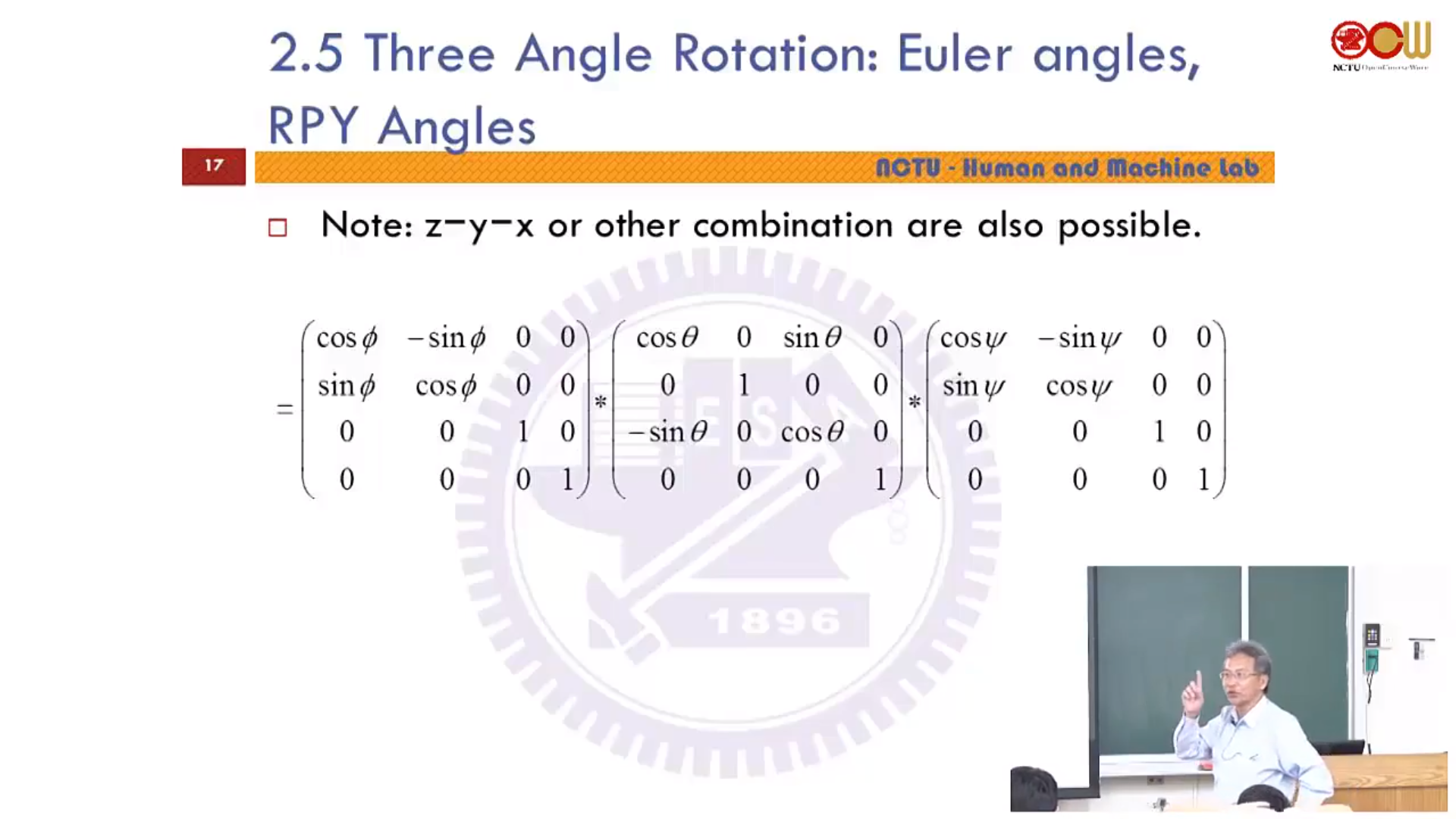
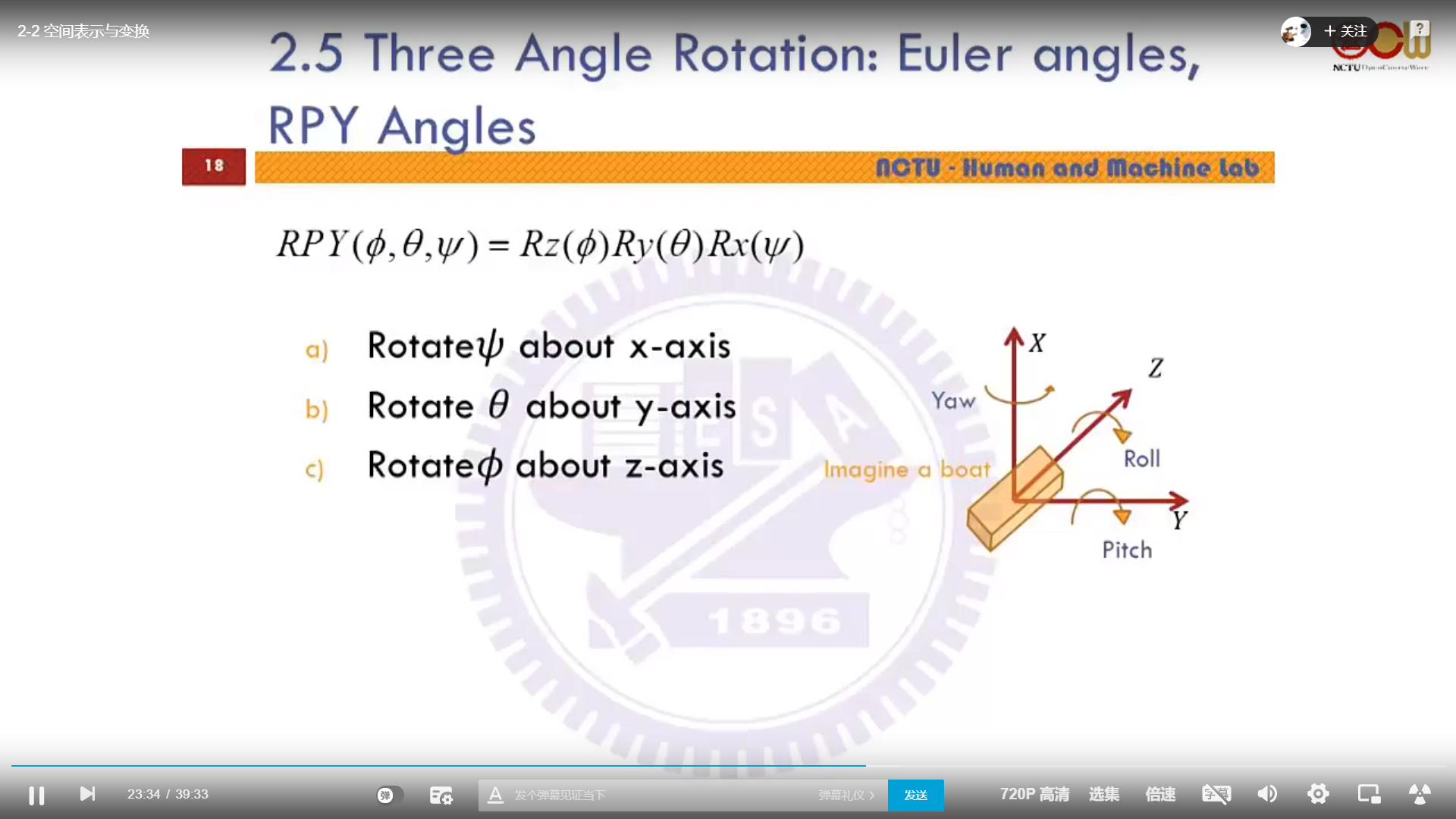
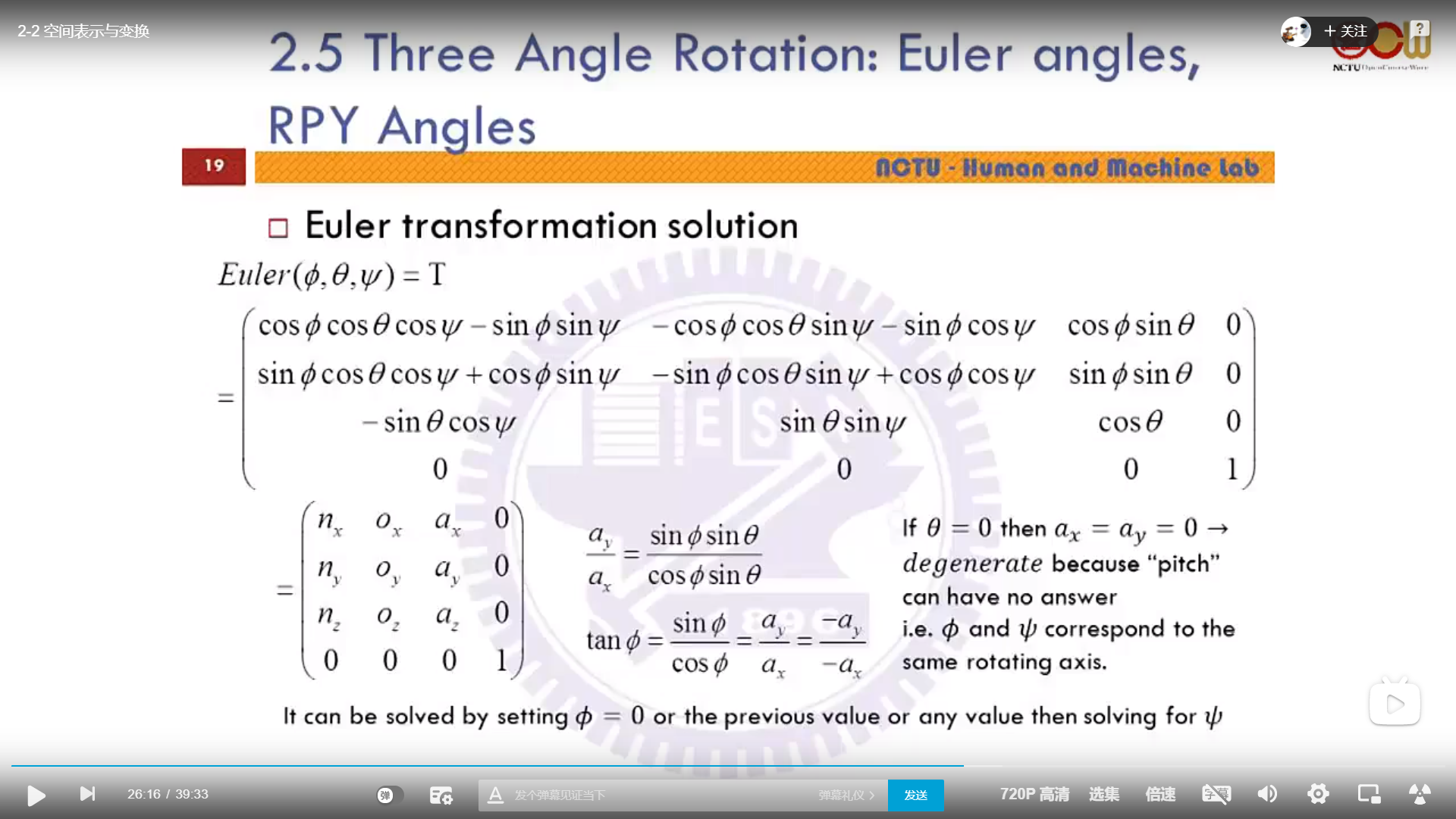
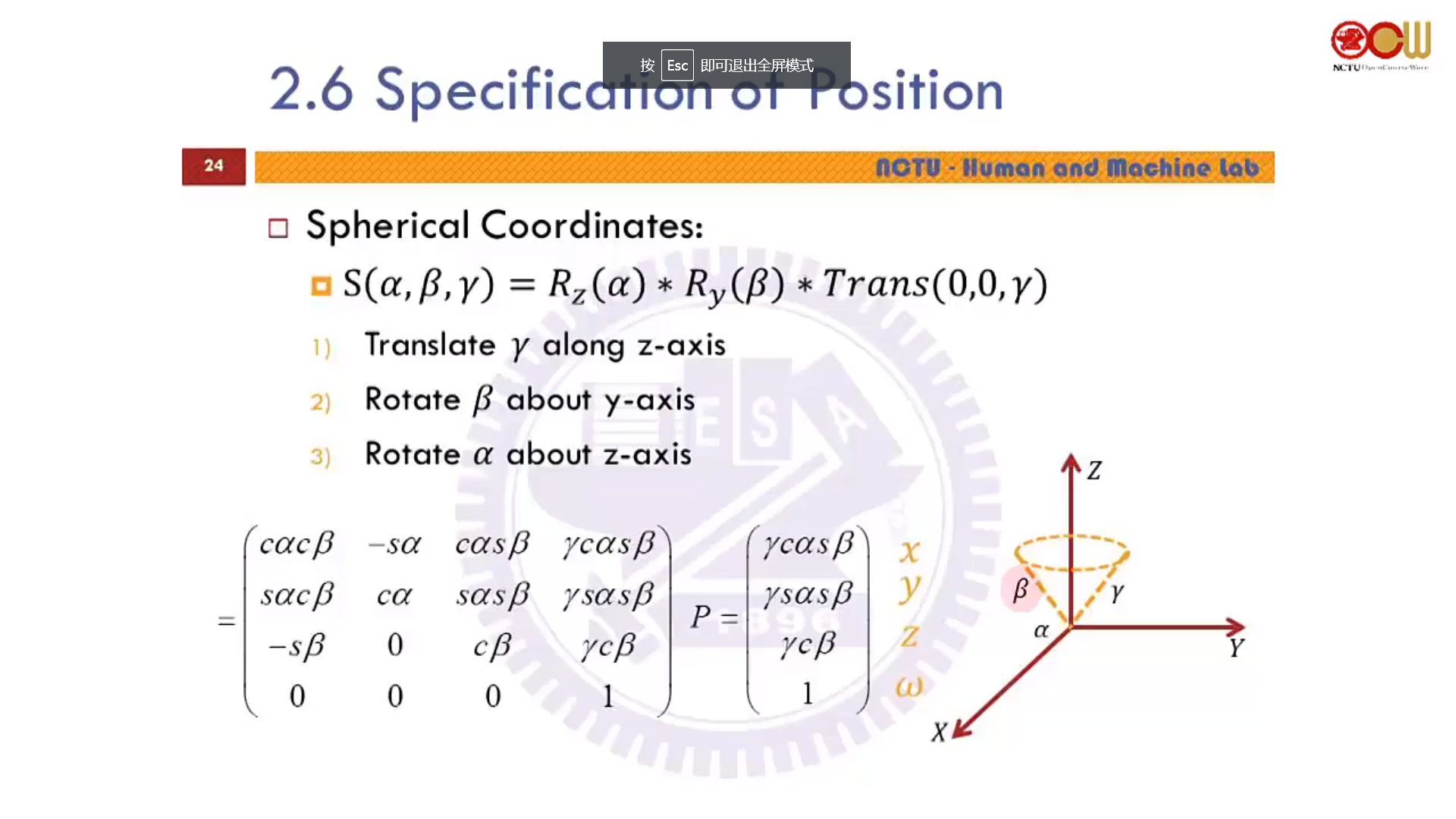
空间坐标与变换
在坐标变换的时候要使用逆矩阵。
旋转矩阵是在乘以一个向量的时候有改变向量的方向,但不改变向量的大小并保持手性的矩阵。
旋转矩阵的逆矩阵是它的转置矩阵。
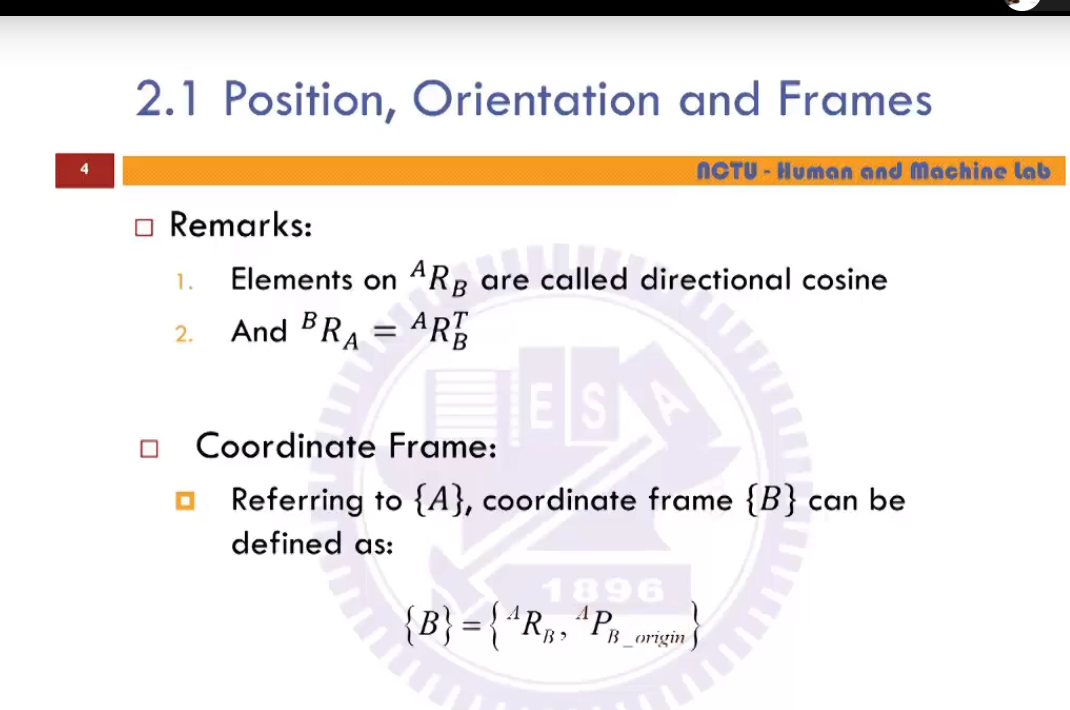
B的原点在P.

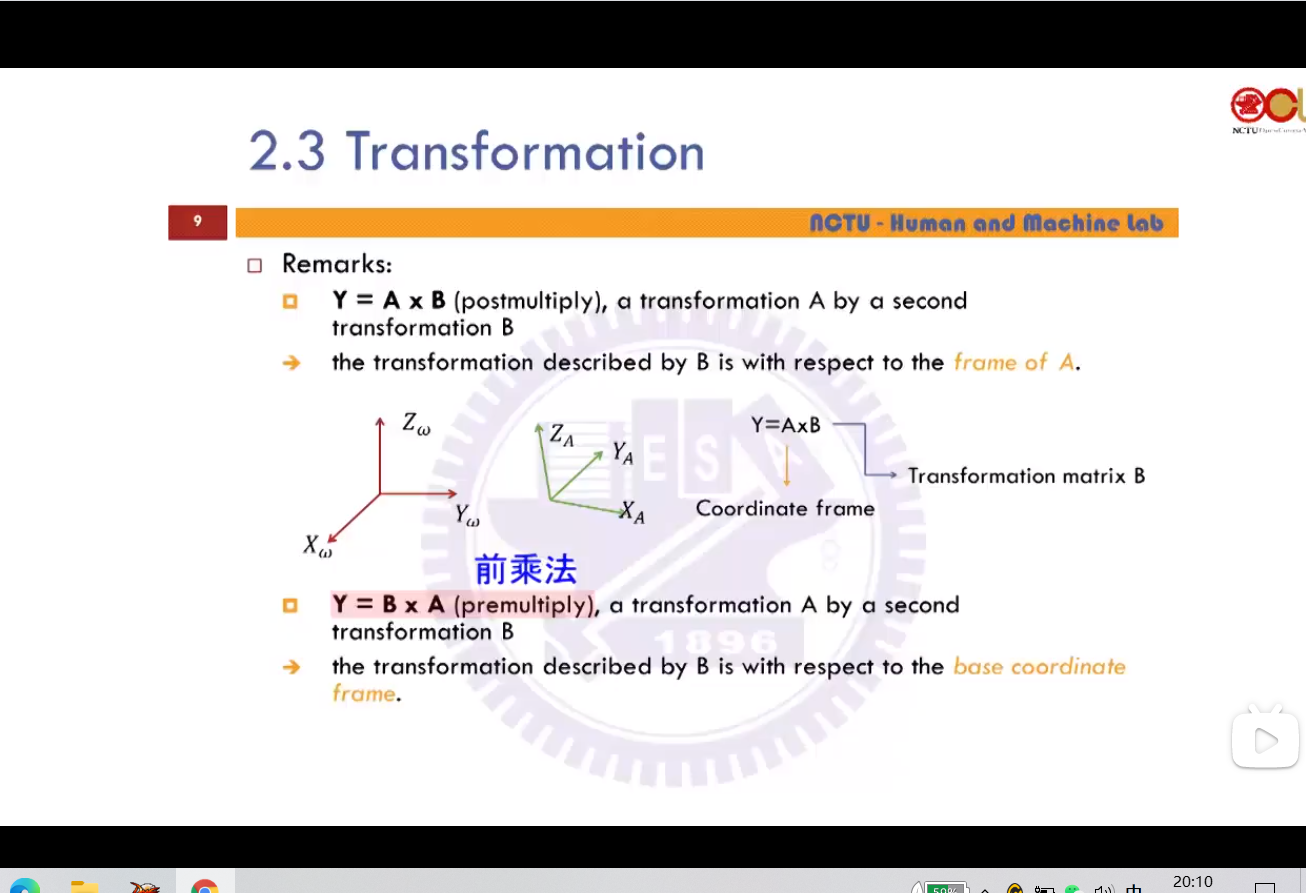
Y=A×B,如果B在A的后面的话,表示B对X轴的旋转是对A的旋转。所以机器人的连杆结构是使用后乘法。
Y=B×A,如果B在A的前面的话,表示B对X轴的旋转是对地面的旋转。
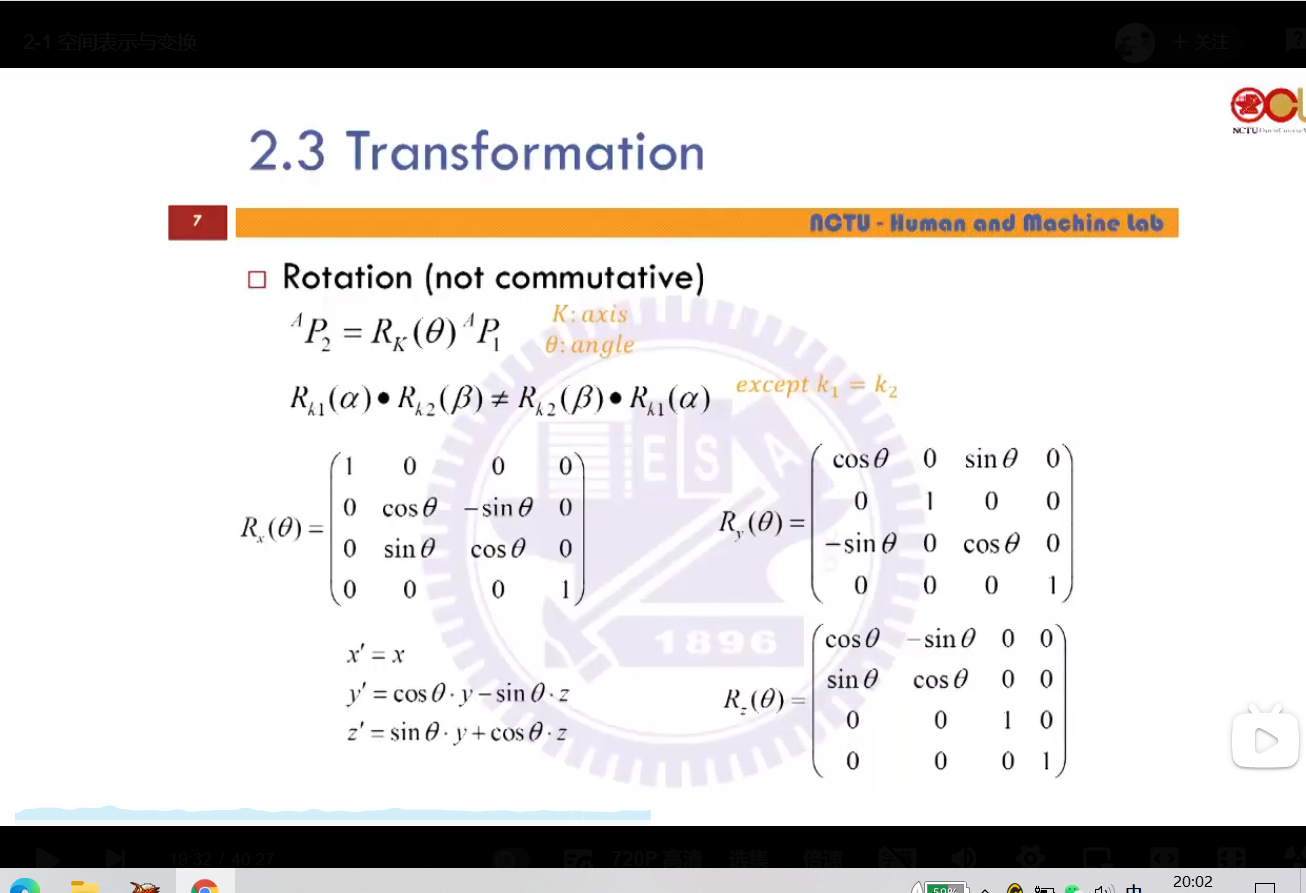
旋转的时候,自由度会变小,会退化。



运动学与逆运动学
正向动力学(forward kinematic):已知机器人的关节角度和长度求终端的位置。(父级能影响子级,而子级不能影响父级)
逆运动学(inverse kinematic):通过终端求各个关节的角度。(是一种子级驱动父级的动画制作方法。)
轴有:旋转轴、平行轴、球形轴、类螺丝型的轴。
所有的轴都可以拆分成为旋转轴和平行轴。
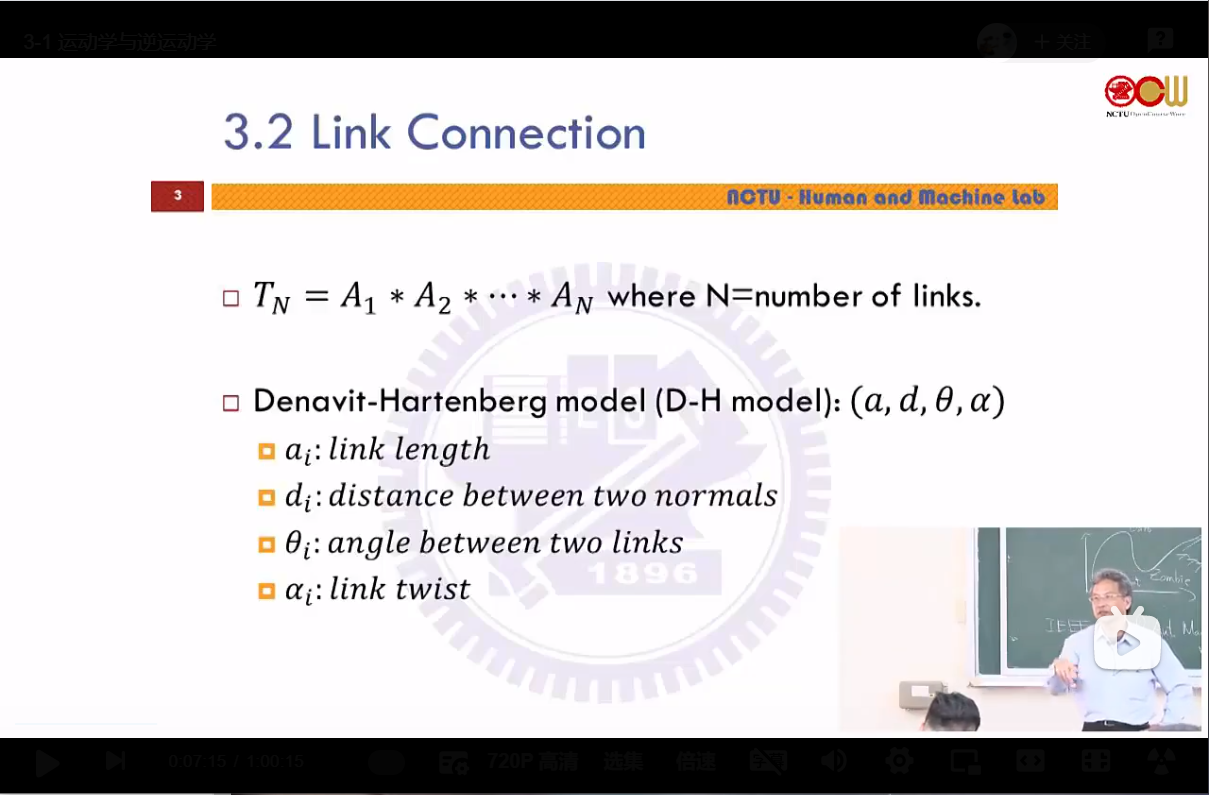
DH model (a,d,θ,α)

可以把每个轴想成两个部分,一个是关节,一个是所连接的连杆。
a:连杆长度
α:连杆扭角
d:关节长度
θ:关节扭角
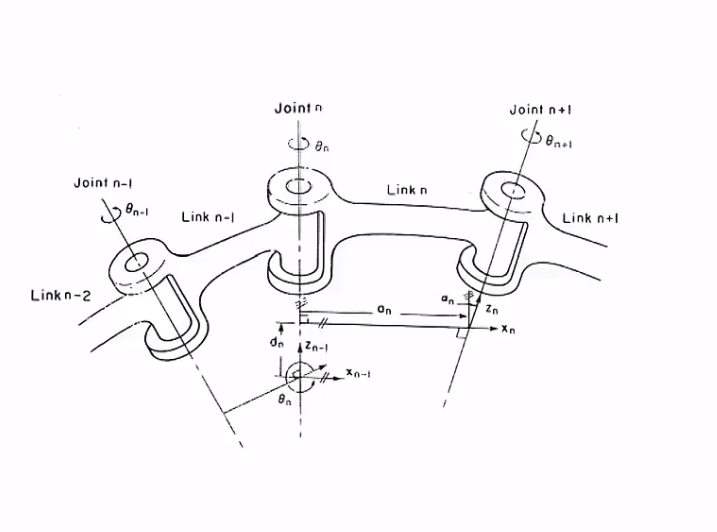
z是下一个轴的旋转轴。
z确定以后再来确定x,找z和前一个z的公垂线(common normal),就是x。


腕臂分割,一般机器人的1、2、3轴会带有比较长的长度,4、5、6轴会做成球形轴,所以复杂度主要是在1、2、3轴。机器人是个6(自由度)的问题,但是我们需要想办法将它变成3(三维空间)的问题。
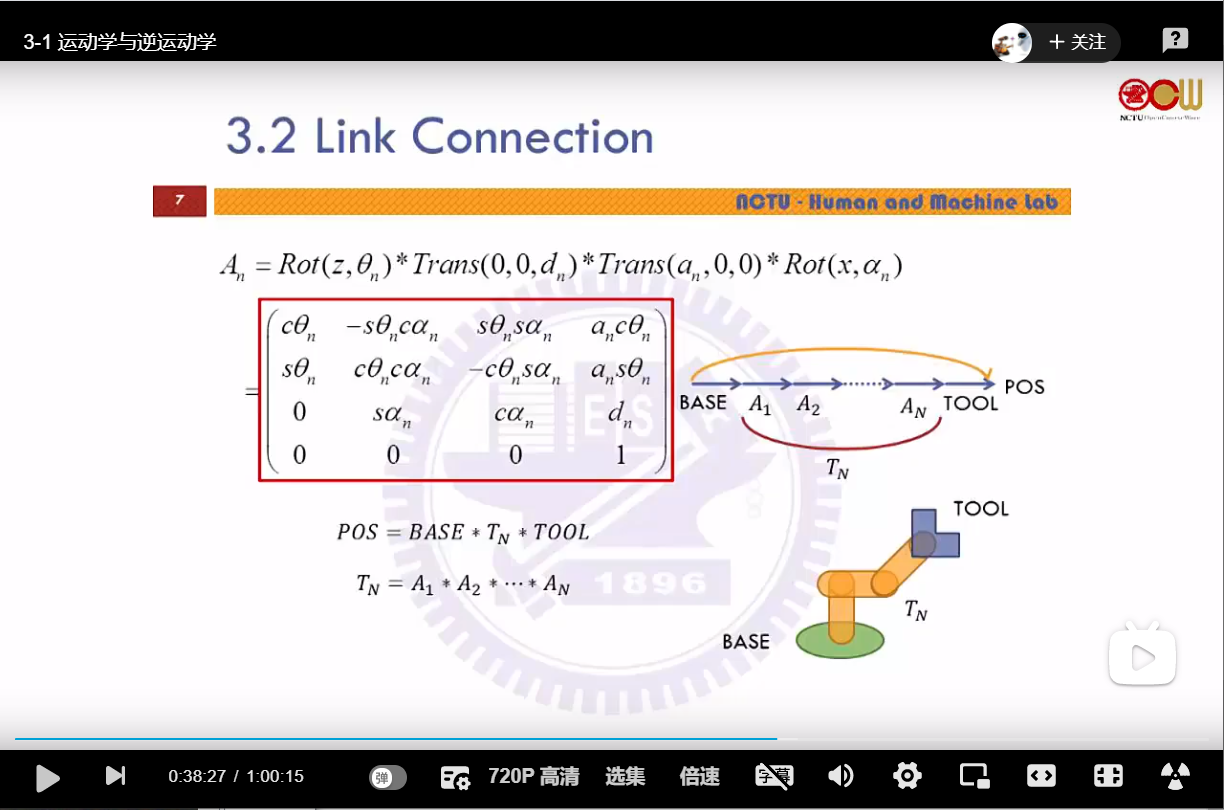
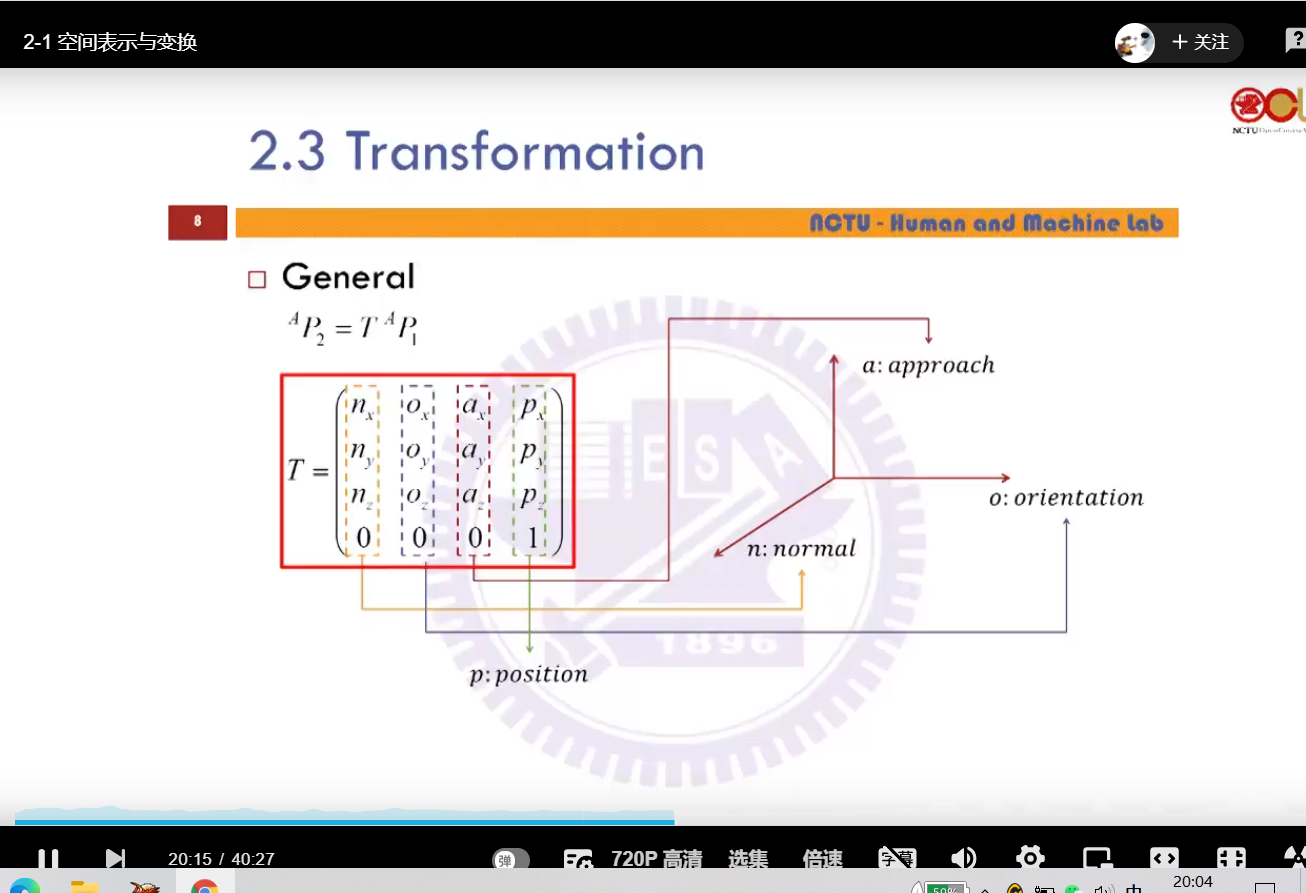
这个是相较于4*4更重要的矩阵。
平行轴没有θ。
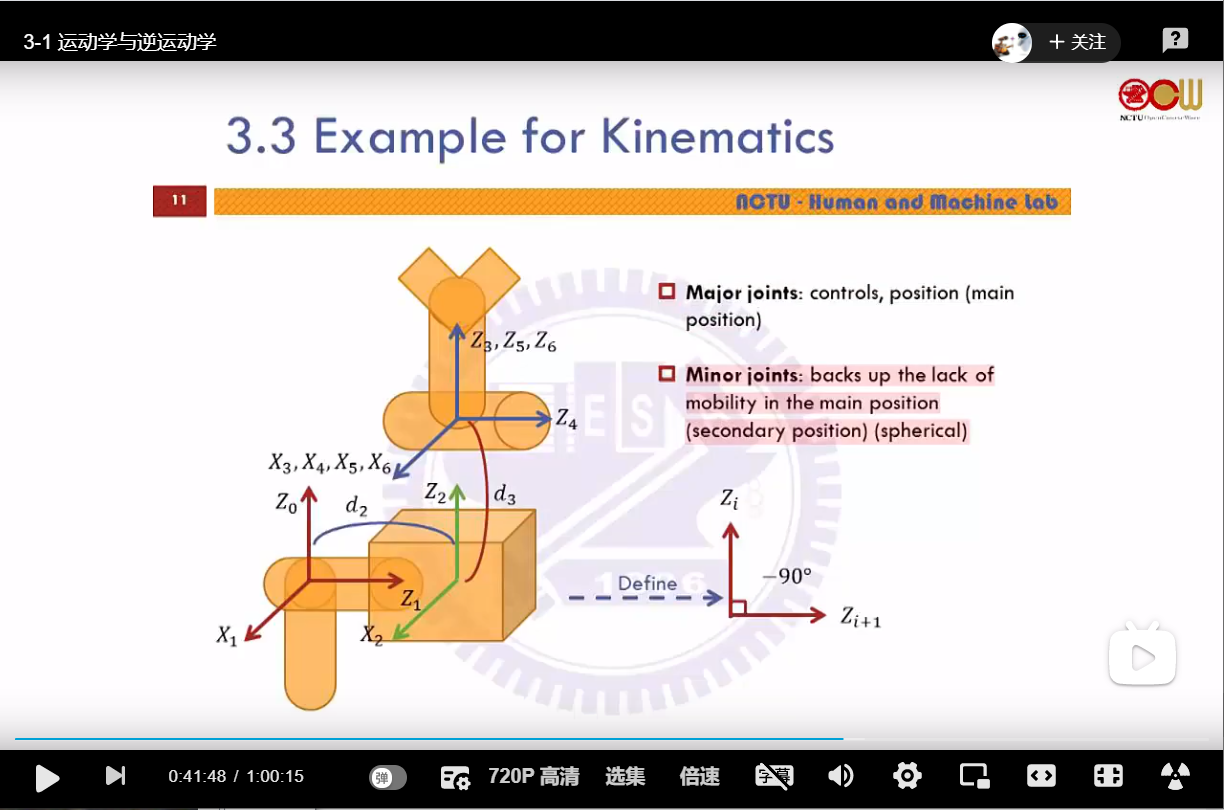
前三个轴叫做major joint,后三个轴叫做minor joint。
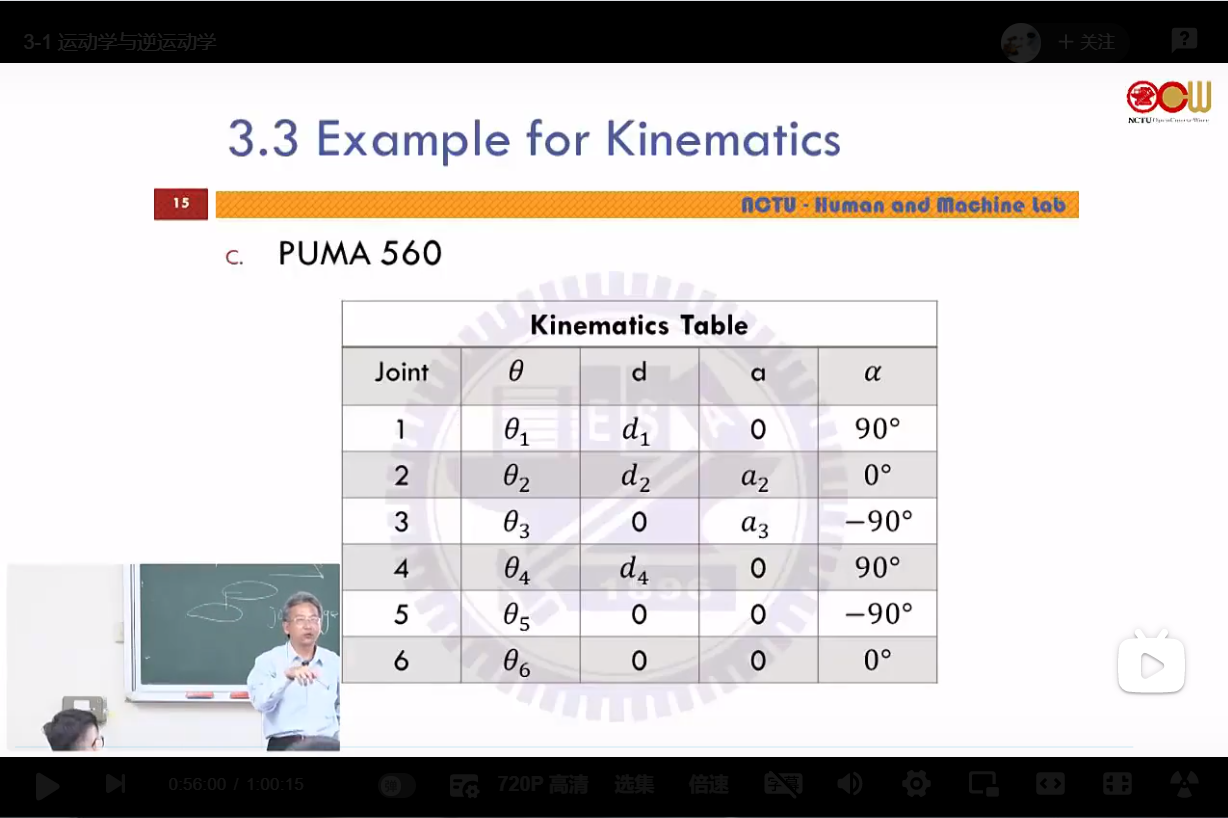
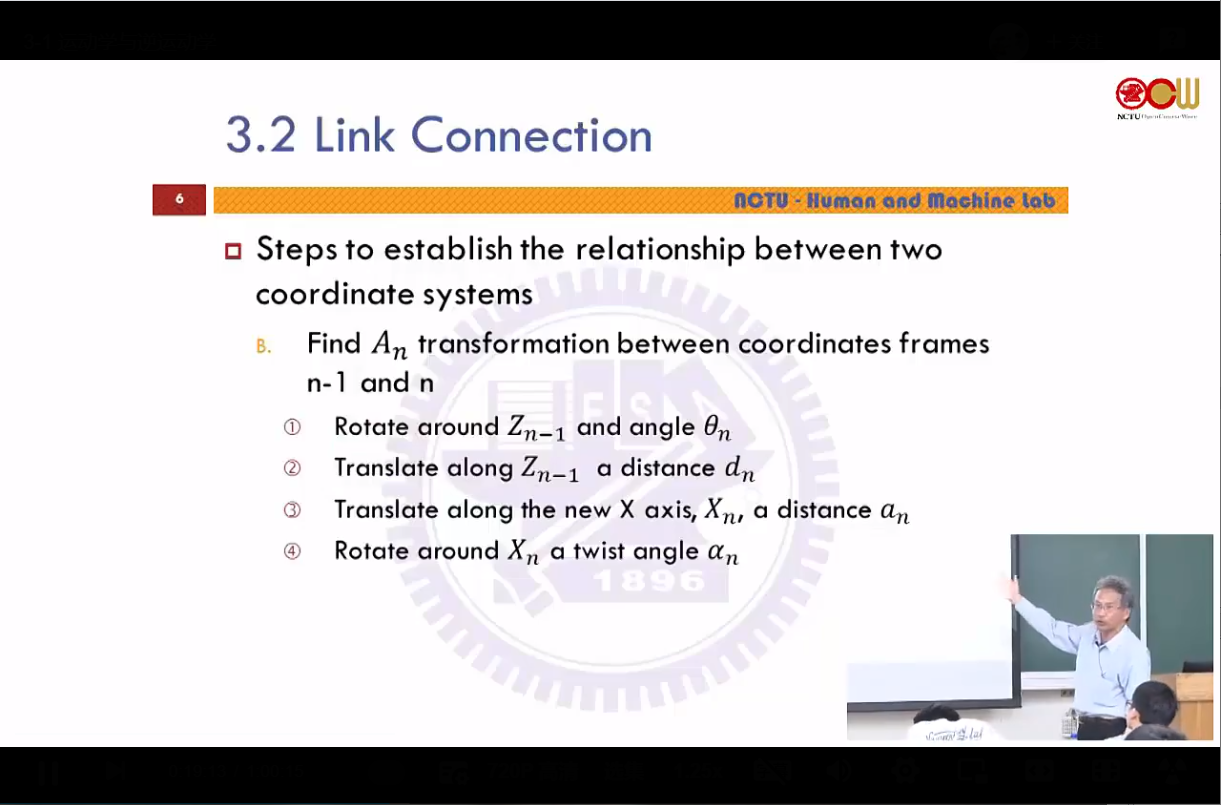
DHmodel使用4个参数表示6个自由度的代价:
1.坐标系统不能乱放,定坐标系需要有个规则;
2.平行的描写和旋转的描写需要分开讨论;
3.位置不够的话会借放在别的地方(如图中的d4,d3在动的时候不会影响到d4),这样实际上4、5、6轴仍旧是没有长度的球形轴。
kinematic并不负责力。















 1756
1756











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









