







从本文开始,从头阅读VINS源代码。
本节主要阅读feature_tracker_node.cpp中的主函数main(),代码实现了feature_tracker节点初始化,配置文件yaml参数读取,topic订阅与发布。
本文只探讨针孔模型。
VINS-Mono/Fusion代码学习系列:
从零学习VINS-Mono/Fusion源代码(一):主函数
从零学习VINS-Mono/Fusion源代码(二):前端图像跟踪
从零学习VINS-Mono/Fusion源代码(三):IMU预积分公式推导
从零学习VINS-Mono/Fusion源代码(四):误差卡尔曼滤波
从零学习VINS-Mono/Fusion源代码(五):VIO初始化
从零学习VINS-Mono/Fusion源代码(六):后端优化
从零学习VINS-Mono/Fusion源代码(一):主函数
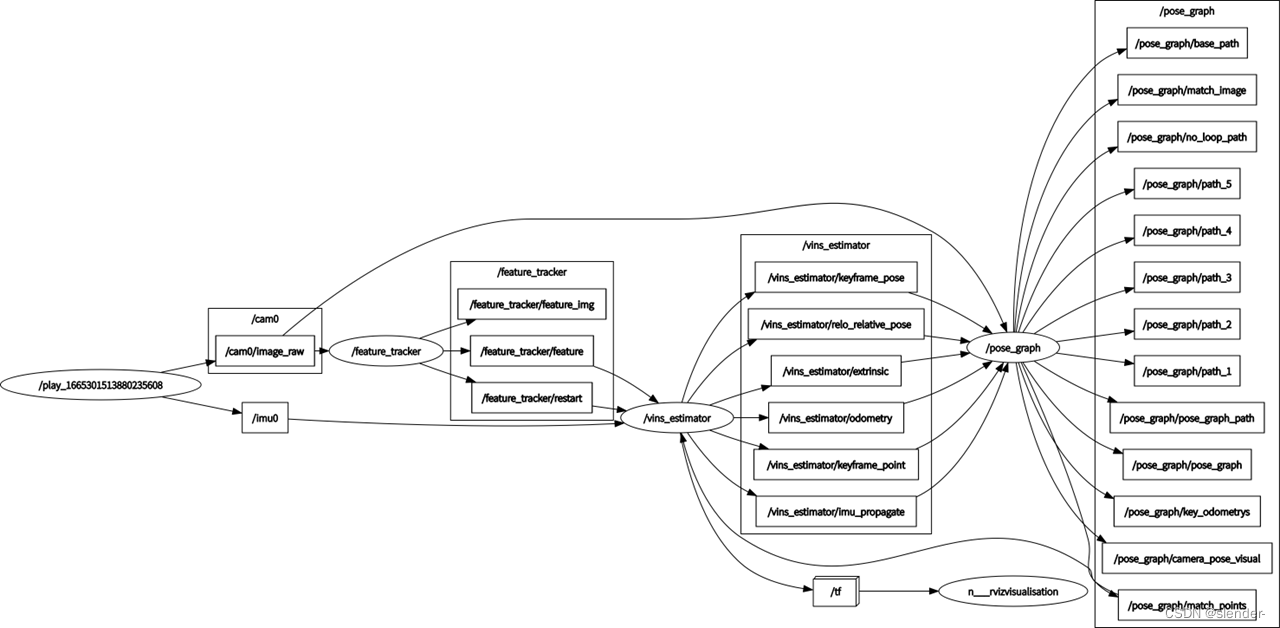
1 系统节点结构
vins-mono源码:https://github.com/HKUST-Aerial-Robotics/VINS-Mono
首先,利用rqt_graph查看ros下系统整体节点图,给出了各个topic的发布和订阅关系。
2 主函数main()
主函数的部分主要是搭建一个ros框架,定义节点、订阅者、发布者,读取配置文件参数,通过回调函数对订阅到的图像信息进行处理。
其整体流程如下图所示:

int main(int argc, char **argv)
{
ros::init(argc, argv, "feature_tracker");//节点名称
ros::NodeHandle n("~");//n句柄
ros::console::set_logger_level(ROSCONSOLE_DEFAULT_NAME, ros::console::levels::Info);
//读取配置参数
readParameters(n);
//在VINS-Mono中 NUM_OF_CAM=1,只有单目
for (int i = 0; i < NUM_OF_CAM; i++)
trackerData[i].readIntrinsicParameter(CAM_NAMES[i]);//读相机内参
if(FISHEYE)
{
for (int i = 0; i < NUM_OF_CAM; i++)
{
trackerData[i].fisheye_mask = cv::imread(FISHEYE_MASK, 0);
if(!trackerData[i].fisheye_mask.data)
{
ROS_INFO("load mask fail");
ROS_BREAK();
}
else
ROS_INFO("load mask success");
}
}
//订阅图像,回调函数img_callback
ros::Subscriber sub_img = n.subscribe(IMAGE_TOPIC, 100, img_callback);
pub_img = n.advertise<sensor_msgs::PointCloud>("feature", 1000);
pub_match = n.advertise<sensor_msgs::Image>("feature_img",1000);
pub_restart = n.advertise<std_msgs::Bool>("restart",1000);
/*
if (SHOW_TRACK)
cv::namedWindow("vis", cv::WINDOW_NORMAL);
*/
ros::spin();
return 0;
}
3 配置参数读取
- readParameters(n) 获取文件路径、topic、各类门限阈值
void readParameters(ros::NodeHandle &n)
{
std::string config_file;
config_file = readParam<std::string>(n, "config_file");//文件路径
cv::FileStorage fsSettings(config_file, cv::FileStorage::READ);
if(!fsSettings.isOpened())
{
std::cerr << "ERROR: Wrong path to settings" << std::endl;
}
std::string VINS_FOLDER_PATH = readParam<std::string>(n, "vins_folder");
fsSettings["image_topic"] >> IMAGE_TOPIC;
fsSettings["imu_topic"] >> IMU_TOPIC;
MAX_CNT = fsSettings["max_cnt"];//每一帧图像提取到的最大特征点数量
MIN_DIST = fsSettings["min_dist"];//特征点间最小距离(主要是为了使特征点分布均匀)
ROW = fsSettings["image_height"];
COL = fsSettings["image_width"];
FREQ = fsSettings["freq"];//跟踪结果发布给后端的频率
F_THRESHOLD = fsSettings["F_threshold"];//ransac门限阈值
SHOW_TRACK = fsSettings["show_track"];
EQUALIZE = fsSettings["equalize"];//图像均衡化
FISHEYE = fsSettings["fisheye"];
if (FISHEYE == 1)
FISHEYE_MASK = VINS_FOLDER_PATH + "config/fisheye_mask.jpg";
CAM_NAMES.push_back(config_file);
WINDOW_SIZE = 20;
STEREO_TRACK = false;
FOCAL_LENGTH = 460;//设定死的虚拟相机焦距
PUB_THIS_FRAME = false;
if (FREQ == 0)
FREQ = 100;
fsSettings.release();
}
- trackerData[i].readIntrinsicParameter(CAM_NAMES[i]) 依次读取各个相机内参
void FeatureTracker::readIntrinsicParameter(const string &calib_file)
{
ROS_INFO("reading paramerter of camera %s", calib_file.c_str());
m_camera = CameraFactory::instance()->generateCameraFromYamlFile(calib_file);
}
CameraFactory::instance()->generateCameraFromYamlFile(calib_file)中
//generateCameraFromYamlFile中确定相机类型并构建模型
case Camera::PINHOLE:
{
PinholeCameraPtr camera(new PinholeCamera);
PinholeCamera::Parameters params = camera->getParameters();
params.readFromYamlFile(filename);//读取yaml文件
camera->setParameters(params);//把params赋值给mParameters
return camera;
}
params.readFromYamlFile(filename)中
bool
PinholeCamera::Parameters::readFromYamlFile(const std::string& filename)
{
cv::FileStorage fs(filename, cv::FileStorage::READ);
if (!fs.isOpened())
{
return false;
}
if (!fs["model_type"].isNone())
{
std::string sModelType;
fs["model_type"] >> sModelType;
if (sModelType.compare("PINHOLE") != 0)
{
return false;
}
}
m_modelType = PINHOLE;
fs["camera_name"] >> m_cameraName;
m_imageWidth = static_cast<int>(fs["image_width"]);
m_imageHeight = static_cast<int>(fs["image_height"]);
cv::FileNode n = fs["distortion_parameters"];//畸变参数
m_k1 = static_cast<double>(n["k1"]);
m_k2 = static_cast<double>(n["k2"]);
m_p1 = static_cast<double>(n["p1"]);
m_p2 = static_cast<double>(n["p2"]);
n = fs["projection_parameters"];//投影参数
m_fx = static_cast<double>(n["fx"]);
m_fy = static_cast<double>(n["fy"]);
m_cx = static_cast<double>(n["cx"]);
m_cy = static_cast<double>(n["cy"]);
return true;
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









