







 SRTM是2000年由NASA等机构执行的航天飞机雷达地形测绘任务,旨在获取全球高精度数字高程模型。通过航天飞机上的雷达设备,实现了单轨道干涉测量,获取了全球80%以上陆地表面的数据,覆盖中国全境。数据处理后产生30米和90米分辨率的高程模型,用于地形测绘、地壳形变监测等领域。SRTM数据分发由NASA和NIMA控制,其中高分辨率数据仅供美国军方和情报机构使用,低分辨率数据对公众开放。
SRTM是2000年由NASA等机构执行的航天飞机雷达地形测绘任务,旨在获取全球高精度数字高程模型。通过航天飞机上的雷达设备,实现了单轨道干涉测量,获取了全球80%以上陆地表面的数据,覆盖中国全境。数据处理后产生30米和90米分辨率的高程模型,用于地形测绘、地壳形变监测等领域。SRTM数据分发由NASA和NIMA控制,其中高分辨率数据仅供美国军方和情报机构使用,低分辨率数据对公众开放。
航天飞机雷达干涉测量任务(Shuttle Radar Topography Mission,SRTM
SRTM背景
美国利用航天飞机搭载成像雷达对地进行观测始于20 世纪80 年代初。1982 年11 月和1985 年10 月, 美国分别进行了两次称为SIR-A与SIR-B的航天飞机成像雷达实验, 结果证明合成孔径雷达(SAR )具有其他传感器所无法比拟的优势, 主要是具有全天候、全天时对地表成像与测绘的能力,并具有一定的穿透能力。
1994 年4 月、10 月, 美国宇航局(NASA)、喷气推进实验室(JPL)、国家图像测绘局(NIMA)与德国、意大利的航天局合作, 共同在航天飞机上进行了两次称为SIR-C X SAR的雷达地形测绘实验。SIR-C X SAR的硬件设备与前两次相比, 由单极化(HH或VV )、单波段(L波段) 及固定入射角,升级为多极化、多波段(C,L和X 波段) 及多入射角。此次实验的结果表明,星载SAR 具有利用重复轨道实现SAR干涉测量,进而高精度地提取全球地形高程数据,并监测地壳形变。
但由于航天飞机飞行时间有限(一般为10 天左右) , 因此只能获取有限地区的重复轨道雷达数据, 且存在部分重复轨道雷达数据难以实现干涉测量的问题。为此, 美国的有关专家提出了对现有的SIR-C X SAR设备进行技术改造, 并在航天飞机上增加一条可伸缩的天线杆, 以实现固定基线单轨获取全球雷达干涉测量数据并提取全球高精度 DEM 的建议。最终,经NA SA 与DMA (国防测绘局, 即现在的NIMA ) 协商,达成了实施SRTM 计划的协议。
SRTM基本情况
SRTM(航天飞机雷达地形测绘任务)是由美国航空航天局,地理空间情报局以及德国和意大利的航天机构于2000年2月开始的。SRTM的全称是Shuttle Radar Topography Mission,即航天飞机雷达地形测绘使命,2000年2月11日上午11时44分,美国“奋进”号航天飞机在佛罗里达州卡那维拉尔角的航天发射中心发射升空,“奋进”号上搭载的SRTM系统共计进行了222小时23分钟的数据采集工作,获取北纬60度至南纬56度之间,面积超过1.19亿平方公里的 9.8万亿字节的雷达影像数据,覆盖全球陆地表面的80%以上,该计划共耗资3.64亿美元,该测量数据覆盖中国全境。
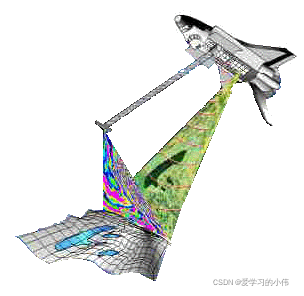
全部原始数据的处理约需两年的时间, 最终将获取平面精度±20 m , 高程精度±16m 的全球数字高程模型(DEM )。此外, 利用重复轨道的SRTM 雷达数据, 可实现差分干涉测量, 用于地壳形变及冰川变化的监测, 精度可达到厘米级。此次航天飞机执行SRTM 任务具有2 个独创之处: ① 通过长达60 m 的可伸缩天线杆, 实现了单轨道雷达干涉测量; ②同时实现了双频(X, C 波段) 及多极化(HH,VV , HV 和VH) 雷达地形数据的获取。
这项计划旨在通过航天飞机的天线以及从航天飞机货舱伸出去的另一副雷达天线接收从地球表面的城市、田野、山脉、森林以及其他地形反射传回的雷达信号。两个雷达收到信号能够被合成为像三维立体电影或照片一样清晰逼真的地形图。美国航空航天局的科学家表示,这样的地球三维地形图将帮助人们改进地球上基础设施和通讯设备。尽管如此,但事实上,借助如此精准的地图,美国国防部将能更好地选择部署部队,甚至是发射导弹的地点。因此这项计划所得的最佳品质图像将被列为机密文件,供美国军方和情报机构使用。只有一些分辨率较低的地图向公众公开,用于普通科研和商业。
SRTM数据每经纬度方格提供一个文件,精度有1 arc-second和3 arc-seconds两种,称作SRTM1和SRTM3,或者称作30M和90M数据,SRTM1的文件里面包含3601*3601个采样点的高度数据,SRTM3的文件里面包含1201*1201个采样点的高度数据。目前能够免费获取中国境内的RTM3文件,是90米的数据,每个90米的数据点是由 9个30米的数据点算术平均得来的。
其主要技术参数有:
轨道高度: 233 km
有效载荷重量: 13. 6 t
扫描带宽: C 波段225 km , X 波段 50 km
雷达波长: C 波段5. 6 cm , X 波段3 cm
极化方式: HH,VV , HV 和VH
天线杆长度: 60 m (基线量测精度为3 mm )
任务期限及轨道数量: 11 天, 176 条(实际获取数据的轨道数为156 条)
数据记录率: C 波段 180Mb/s, X 波段90Mb/s;
空间分辨率: 30 m × 30 m
bk 精度: C波段水平和高程精度分别为20 m 和10 m,X波段水平和高程精度分别为20 m 和4 m
bl 覆盖范围: 北纬60°以南与南纬56°以北之间, 约占全球80% 的陆地表面。
SRTM数据下载的地址是:ftp://e0mss21u.ecs.nasa.gov/srtm/ 。我国境内的数据在Eurasia目录下,每经纬度方格一个文件,文件命名方法是X1X2X3X4.hgt.zip,X1是N或S表示南北,X2是下方纬度数,X3是E或W表示东西,X4是左方经度数。
SRTM的数据处理方式:
SRTM 获取的C 波段数据由美国处理, 而X 波段数据则由德国处理。下面介绍C 波段数据的处理步骤。
1、拷贝SRTM 的数据磁带
第一项活动是拷贝飞行期间获得的数据磁带, 共有208 盒C 波段雷达数据磁带。拷贝工作由隶属于NASA的JPL一个工程小组在肯尼迪航天中心(KSC) 进行, 由于复制数据的速度为采集数据的1/6, 因此, 估计复制全部数据将花费2 个月的时间。JPL 计划制作2 份拷贝, 并将拷贝数据转送到JPL进行处理。
2、处理SRTM 数据
SRTM数据的处理由地面数据处理系统(GDPS) 来完成。GDPS 由3 部分组成:
① 干涉测量处理器, 利用干涉测量原理将原始雷达数据转换为高程图和雷达图像条带;
② 镶嵌处理器, 用于将采集的全球多条航带数据编绘成大陆高程和图像的镶嵌图;
③ 验证系统, 负责检测镶嵌图的质量, 并提供精度图。
这些处理器目前装载在JPL的工作站上, 下一步工作是将它们安装到一组超级计算机上, 以便对整个SRTM数据集进行系统处理。随着这项工作的进行, JPL 将向公众发布辅助产品,在航天飞机飞行期间曾向公众发布了部分产品。一旦得到重新格式化的飞行文件,JPL还将发布DEM和正射纠正雷达图像样品, 并检校其工作站的性能。SRTM数据将依据逐大陆的原则进行处理,而最先处理那一地区的数据则由N IMA来决定。处理完成后,数据将移交给NIMA进行数据的最后质量检核。最后,拷贝将移交给USGS的EROS数据中心存档并向公众开放。NIMA负责为美国国防部提交重新格式化的DTED 格式数据。
3、 SRTM 数据的检核
SRTM数据的检核主要通过如下几种方式进行, 即:
-
- 大地测量, 主要是利用动态差分GPS,测量了70000km长的线, 用以构造长波误差源模型;
- 布设具有高反射能力及精确坐标的角反射器, 以便在雷达图像上清晰成像;
- 利用海面区的雷达数据。
4、SRTM高程数据产品的精度
C波段 X波段
绝对水平精度+20m 绝对水平精度+20m
相对水平精度+15m 相对水平精度+15m
绝对高程精度+16m 绝对高程精度+16m
相对高程精度+10m 相对高程精度+10m
空间分辨率 30mX30m 空间分辨率 30mX30m
影响精度的主要因素包括: 天线杆和姿态的量测精度、记时误差、多路径效应、相位量测误差及雷达的热噪声。其中姿态的量测误差是主要的误差源, 如舱外天线在横滚方向 ±3 mm 的误差就会导致±9 m 的高程误差。
5、SRTM 数据的分发
SRTM 数据的分发将以NASA与NIMA达成的协议为依据, 即美国本土以外的全分辨率数据由NIMA 控制, NASA 只能向公众提供3弧秒(90 m)的数据。SRTM的C波段数据将通过USGS的EROS数据中心来分发,X波段数据将由德国航天中心来分发。分发方式主要是通过互联网及 CD2ROM 和DVD 媒体。
6、 SRTM 的主要产品
SRTM 的数字产品主要包括如下几种:
1. LEVEL22地形高程数据集。绝对水平和高程精度分别为±20 m 和±16 m; 范围为5°×5°; 高程数据间隔为1 弧秒, 约30 m。
2. 带状正射纠正图像数据集。采样间距为15m ×15m; 单个文件的覆盖区域为60 km ×450~ 60 km ×4 500 km。最后移交给N IMA 进行镶嵌。
3. 随机高误差数据集。
4. 系统高程误差模型。
5. 最终检核报告及全球高程误差模型。
6. 数字高程图像产品: 有以颜色表示高程的雷达图像; 带彩色干涉条纹的雷达图像; 晕渲地貌; 互补色立体像对; 叠置有雷达图像并以颜色表示高程的透视图; 晕渲地貌透视图; 叠置有陆地卫星或其他图像的透视图; 等高线图; 立体像对。
参考资料:
https://wenku.baidu.com/view/1a7c2d2aabea998fcc22bcd126fff705cc175cf9.html


















 1670
1670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











