







6月19日,我们将开启第六场大咖访谈
《与优秀的人同行》已成功连线上海交通大学秦通老师、浙江大学高飞老师、清华大学许华哲老师、香港大学李弘扬老师、妙动科技CTO杨硕博士等学术界/产业界顶尖嘉宾,全网播放破几十万。
这一次,我们继续深挖机器人学术前沿,本期对话的嘉宾——新加坡国立大学助理教授石凡老师。

注:本系列直播均不提供回放,仅直播期间可免费观看,请务必调整时间参与直播。

“石凡的履历介绍”

(图片来源:石凡主页)
1、学术背景:
本科毕业于北京大学,博士毕业于东京大学,期间还曾访问ETH Zurich、微软亚洲研究院等国际顶尖机构。
2、学术荣誉:
-
获得ICRA 2018最佳论文奖、博士论文院长奖、ICRA 2020 IEEE RAS-JJC青年奖、瑞士人工智能安全决赛奖等多项国际大奖;
-
他还是IEEE Spectrum Robotics的撰稿人之一,并在多个国际会议和期刊上担任审稿人,如ICRA、IROS、RAL和RSS。
3、现任职位:
新加坡国立大学助理教授,同时担任Human-Centered Robotic Lab(HcRL)实验室负责人,荣获新加坡国立大学校长青年教授奖。
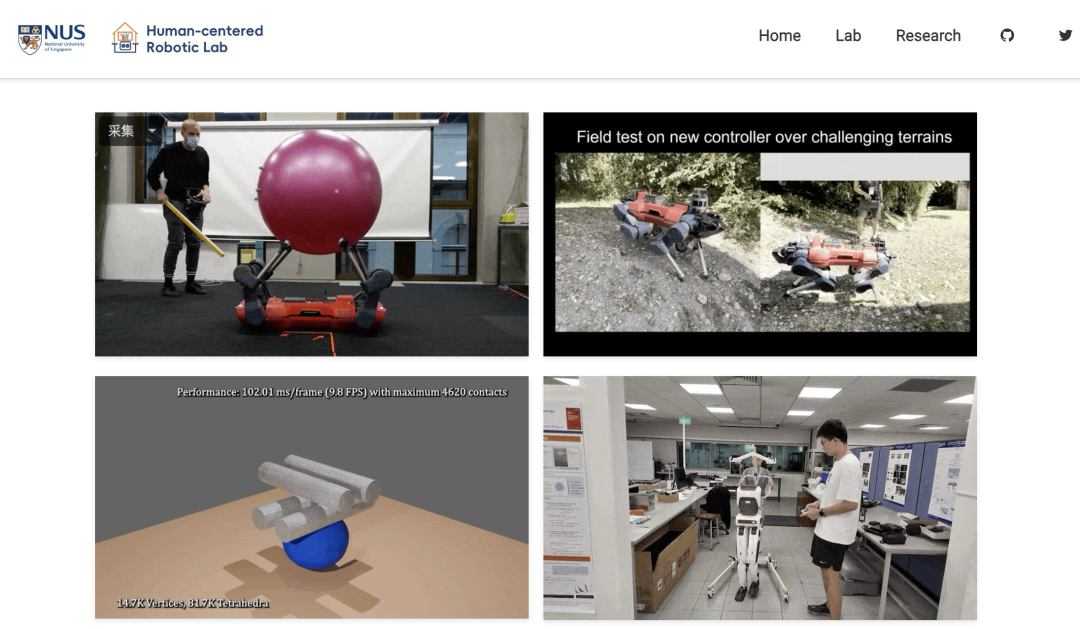
(图片来源:HcRL主页)
4、里程碑式研究成果:
-
《A Dual-Rotor-Embedded Multilink Robot With the Ability of Multi-Degree-of-Freedom Aerial Transformation》
-
《Aerial Regrasping: Dynamic Pivoting with Transformable Multilink Aerial Robot》(ICRA 2020 IEEE RAS-JJC青年奖)
首次利用接触感知规划框架实现空中重新抓取。
-
《Circus ANYmal: A Quadruped Learning Dexterous Manipulation with its Limbs》(ICRA 2021)
首次在真实的四足机器人上实现动态灵巧操作。
-
......
这些研究成果不仅展现了石凡老师在机器人领域的创新能力,也为我们提供了深入探讨机器人技术前沿的契机。
-
如何理解接触感知规划与传统运动控制的本质区别?在动态环境中如何平衡主动接触与避障的矛盾?
-
机器人模拟器当前还有哪些挑战,为何将模拟器作为主要研究方向?
-
对于零基础的研究者,入门机器人领域需要优先掌握哪些数学与编程基础?
-
2025年,机器人到底走到了哪一步?
-
......
6月19日晚20:00,与青年学者石凡老师一起聊聊机器人「进化」!
PS:扫码入群可提前提交问题,增加被翻牌概率!


直播期间免费开放,有机会在线QA交流
这是深蓝学院推出的《与优秀的人同行》系列直播访谈06期。
我们希望能打破时间、空间、经验的屏障,让更多同仁们能够与不同的业内前辈和杰出青年交流探讨。这回,我们聊点【真】的。
6月19日(周四)晚上20:00全程直播,《与优秀的人同行》第六期,共同对话新加坡国立大学助理教授——石凡老师,欢迎各位同仁加入。
交流群限时免费开放【800席】

扫描上方二维码,加入直播交流群
我们群内见!直播见!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









